Getaran mekanikal. Parameter ayunan
Getaran mekanikal. Parameter ayunan. Getaran harmonik.
teragak-agak Sesuatu proses dipanggil tepat atau lebih kurang berulang pada selang waktu tertentu.
Ciri ayunan adalah kehadiran wajib kedudukan keseimbangan yang stabil pada trajektori, di mana jumlah semua daya yang bertindak pada jasad adalah sama dengan sifar dipanggil kedudukan keseimbangan.
Bandul matematik ialah titik bahan yang digantung pada benang nipis, tidak berat dan tidak boleh dipanjangkan.
Parameter gerakan berayun.
1. Mengimbangi atau menyelaras (x) - sisihan daripada kedudukan keseimbangan dalam sesuatu yang diberikan
detik masa. | [x ]=m | |
2. Amplitud ( xm) ialah sisihan maksimum daripada kedudukan keseimbangan.
[ X m ]=m
3. Tempoh ayunan ( T) ialah masa yang diperlukan untuk satu ayunan lengkap.
[T ]=c.
0 "style="margin-left:31.0pt;border-collapse:collapse">
Bandul matematik
m
https://pandia.ru/text/79/117/images/image006_26.gif" width="134" height="57 src="> Kekerapan (linear) ( n ) – bilangan ayunan lengkap dalam 1 s.
[n]= Hz
5. Kekerapan kitaran ( w ) – bilangan ayunan lengkap dalam 2p saat, iaitu, lebih kurang 6.28 s.
![]()
w = 2pn ; [w]=0" style="margin-left:116.0pt;border-collapse:collapse">

https://pandia.ru/text/79/117/images/image012_9.jpg" width="90" height="103">
Bayangan pada skrin berubah-ubah.
Persamaan dan graf ayunan harmonik.
Getaran harmonik - ini adalah ayunan di mana koordinat berubah mengikut masa mengikut hukum sinus atau kosinus.
https://pandia.ru/text/79/117/images/image014_7.jpg" width="254" height="430 src="> x=Xmdosa(w t+j 0 )
x=Xmcos(w t+j 0 )
x - koordinat,
Xm ialah amplitud ayunan,
w ialah kekerapan kitaran,
wt+j 0 = j ialah fasa ayunan,
j 0 ialah fasa awal ayunan.
https://pandia.ru/text/79/117/images/image016_4.jpg" width="247" height="335 src=">
Graf adalah berbeza sahaja amplitud
Graf berbeza hanya dalam tempoh (kekerapan)
https://pandia.ru/text/79/117/images/image018_3.jpg" width="204" height="90 src=">
Jika amplitud ayunan tidak berubah dari semasa ke semasa, ayunan dipanggil tidak lembap.

Ayunan semula jadi tidak mengambil kira geseran, jumlah tenaga mekanikal sistem, kekal malar: E kepada + E n = E bulu = const.
Ayunan semula jadi tidak terendam.
Dengan ayunan paksa, tenaga yang dibekalkan secara berterusan atau secara berkala daripada sumber luaran mengimbangi kerugian yang timbul akibat kerja daya geseran, dan ayunan boleh tidak terendam.
Tenaga kinetik dan potensi badan semasa getaran masuk ke dalam satu sama lain. Apabila sisihan sistem dari kedudukan keseimbangan adalah maksimum, tenaga keupayaan adalah maksimum, dan tenaga kinetik adalah sifar. Apabila melepasi kedudukan keseimbangan, begitu juga sebaliknya.
Kekerapan getaran percuma ditentukan oleh parameter sistem ayunan.
Kekerapan ayunan paksa ditentukan oleh kekerapan tindakan kuasa luar. Amplitud ayunan paksa juga bergantung kepada daya luaran.
Resonan c
 Resonans
dipanggil peningkatan mendadak dalam amplitud ayunan paksa apabila kekerapan tindakan daya luaran bertepatan dengan kekerapan ayunan semula jadi sistem.
Resonans
dipanggil peningkatan mendadak dalam amplitud ayunan paksa apabila kekerapan tindakan daya luaran bertepatan dengan kekerapan ayunan semula jadi sistem.
Apabila frekuensi w perubahan daya bertepatan dengan frekuensi semula jadi w0 ayunan sistem, daya melakukan kerja positif sepanjang tempoh, meningkatkan amplitud ayunan badan. Pada mana-mana kekerapan lain, semasa satu bahagian tempoh, daya melakukan kerja positif, dan semasa bahagian lain tempoh itu, ia melakukan kerja negatif.
Pada resonans, peningkatan dalam amplitud ayunan boleh membawa kepada kemusnahan sistem.
Pada tahun 1905, di bawah skuadron pengawal berkuda, jambatan Mesir merentasi Sungai Fontanka di St. Petersburg runtuh.
Ayunan diri.
Ayunan diri dipanggil ayunan yang tidak terendam dalam sistem yang disokong sumber dalaman tenaga jika tiada perubahan luaran dalam daya.
Tidak seperti ayunan paksa, frekuensi dan amplitud ayunan sendiri ditentukan oleh sifat-sifat sistem ayunan itu sendiri.
Ayunan sendiri berbeza daripada ayunan bebas oleh kebebasan amplitud dari masa dan dari kesan jangka pendek awal yang mengujakan proses ayunan. Sistem berayun sendiri biasanya boleh dibahagikan kepada tiga elemen:
1) sistem ayunan;
2) sumber tenaga;
3) peranti maklum balas yang mengawal aliran tenaga daripada sumber ke dalam sistem berayun.
Tenaga yang datang dari sumber dalam satu tempoh adalah sama dengan tenaga yang hilang dalam sistem ayunan pada masa yang sama.
Dalam sistem berayun, terdapat peralihan berkala bagi satu jenis tenaga kepada yang lain, apabila tenaga potensi (tenaga bergantung kepada kedudukan sistem) ditukar kepada tenaga kinetik (tenaga gerakan) dan sebaliknya.
Perwakilan visual proses ayunan boleh diperolehi dengan membina graf ayunan jisim individu dalam koordinat. t(masa) dan y(pergerakan).
Jika tenaga luaran memasuki sistem ayunan, ayunan akan meningkat (Rajah 16.6 a). Jika tiada tenaga luar dibekalkan kepada sistem konservatif, ayunan akan tidak terendam (Rajah 16.6 b). Jika tenaga sistem berkurangan (contohnya, disebabkan geseran dalam sistem pelesapan), ayunan akan dilembapkan (Rajah 16.6 c).
Satu ciri penting proses ayunan ialah bentuk ayunan. bentuk gelombang - ini ialah lengkung yang menunjukkan kedudukan titik-titik sistem berayun berbanding kedudukan keseimbangan pada titik masa yang tetap. Bentuk getaran yang paling mudah boleh diperhatikan. Sebagai contoh, bentuk gelombang wayar yang tergantung di antara dua tiang, atau tali gitar, boleh dilihat dengan jelas.
Ayunan yang berlaku tanpa adanya beban luar dipanggil getaran percuma . Ayunan bebas sistem pelesapan diredam kerana jumlah tenaganya berkurangan. Tenaga sistem konservatif kekal malar, dan ayunan bebasnya tidak akan terendam. Walau bagaimanapun, sistem konservatif tidak wujud dalam alam semula jadi, jadi ayunan mereka hanya dikaji secara teori. Getaran bebas sistem konservatif dipanggil getaran sendiri .
Turun naik berkala adalah getaran yang memenuhi syarat y(t)=y(t+T). Di sini T ialah tempoh ayunan, i.e. masa satu ayunan. Ayunan berkala mempunyai ciri penting lain juga. Sebagai contoh, amplitud a adalah separuh hayunan a=(y maks – y min )/2 , kekerapan bulat ialah bilangan ayunan per 2 detik, kekerapan teknikal f ialah bilangan getaran dalam satu saat. Kedua-dua frekuensi dan tempoh ini saling berkaitan:
(Hz), (rad/s).
Getaran harmonik adalah ayunan yang berubah mengikut undang-undang atau Di sini – fasa ayunan , – fasa awal .
Getaran paksa timbul di bawah pengaruh kuasa luar.
Getaran ialah ayunan paksa yang berlaku dengan amplitud yang agak kecil dan frekuensi yang tidak terlalu rendah.
4. Jenis-jenis beban dinamik
Getaran struktur timbul daripada beban dinamik. Tidak seperti beban statik, beban dinamik berubah mengikut masa dalam magnitud, arah atau kedudukan. Mereka memberitahu jisim sistem pecutan, menyebabkan daya inersia, yang boleh menyebabkan peningkatan mendadak dalam ayunan, dan akibatnya, kepada kemusnahan keseluruhan struktur atau bahagiannya.
Pertimbangkan jenis utama beban dinamik.
ialah beban yang dikenakan pada struktur selepas tempoh tertentu. Sumber beban berkala adalah pelbagai mesin dan mekanisme: motor elektrik, mesin kerja logam, kipas, emparan, dll. Jika bahagian berputarnya tidak seimbang, maka ia menyebabkan beban harmonik (beban berubah mengikut hukum sinus atau kosinus). Beban sedemikian dipanggil beban getaran . Pemampat dan pam salingan, mesin pengecap, penghancur, pemacu cerucuk, dsb. beban bukan harmonik .berayun proses dipanggil di mana parameter yang mencirikan keadaan sistem ayunan mempunyai kebolehulangan tertentu dalam masa. Proses sedemikian, sebagai contoh, boleh menjadi turun naik harian dan tahunan dalam suhu atmosfera dan permukaan Bumi, ayunan bandul, dsb.
Jika selang masa selepas keadaan sistem berulang adalah sama antara satu sama lain, maka ayunan dipanggil berkala, dan selang masa antara dua keadaan identik berturut-turut bagi sistem ialah tempoh ayunan.
Untuk turun naik berkala fungsi yang menentukan keadaan sistem ayunan diulang selepas tempoh ayunan:
Antara turun naik berkala tempat istimewa mengambil teragak-agak harmonik, iaitu ayunan di mana ciri-ciri gerakan sistem berubah mengikut undang-undang harmonik, contohnya:
Paling Perhatian, yang diberikan dalam teori ayunan kepada proses harmonik yang sering ditemui dalam amalan, dijelaskan oleh fakta bahawa radas analisis paling baik dibangunkan untuk mereka, dan oleh fakta bahawa sebarang ayunan berkala (dan bukan sahaja berkala) boleh dianggap sebagai gabungan komponen harmonik tertentu. Atas sebab ini, kami akan mempertimbangkan terutamanya ayunan harmonik di bawah. Dalam ungkapan analitik ayunan harmonik, nilai x sisihan titik bahan daripada kedudukan keseimbangan dipanggil anjakan.
Jelas sekali, sisihan maksimum titik dari kedudukan keseimbangan ialah a, nilai ini dipanggil amplitud ayunan. Kuantiti fizik sama dengan:
dan yang menentukan keadaan sistem berayun pada masa tertentu, dipanggil fasa ayunan. Nilai fasa pada masa permulaan dari kiraan masa
dipanggil fasa awal ayunan. Nilai w dalam ungkapan fasa ayunan, yang menentukan kelajuan proses ayunan, dipanggil frekuensi ayunan bulat atau kitaran.
Keadaan pergerakan semasa ayunan berkala hendaklah diulang pada selang waktu yang sama dengan tempoh ayunan T. Dalam kes ini, jelas sekali, fasa ayunan harus berubah sebanyak 2p (tempoh fungsi harmonik), iaitu:
Ia berikutan bahawa tempoh ayunan dan kekerapan kitaran dikaitkan dengan hubungan:
Kelajuan titik, hukum pergerakan yang ditentukan, juga berubah mengikut undang-undang harmonik
Ambil perhatian bahawa anjakan dan halaju titik tidak lenyap secara serentak atau mengambil nilai maksimum, i.e. pencampuran dan halaju berada di luar fasa.
Begitu juga, kita memperoleh bahawa pecutan titik adalah sama dengan:
Ia boleh dilihat daripada ungkapan untuk pecutan bahawa ia berada di luar fasa berkenaan dengan sesaran dan halaju. Walaupun anjakan dan pecutan secara serentak melalui sifar, pada masa ini ia mempunyai arah yang bertentangan, i.e. beralih ke p. Graf kebergantungan anjakan, kelajuan dan pecutan pada masa untuk ayunan harmonik dibentangkan pada skala bersyarat dalam rajah
![]()
Daripada undang-undang pergerakan harmonik, menggunakan formula transformasi trigonometri, anda boleh menulis:
Getaran sendiri.
Kami akan mempertimbangkan ciri utama ayunan semula jadi menggunakan contoh sistem ayunan mekanikal dengan satu darjah kebebasan, i.e. sistem sedemikian, yang kedudukannya boleh ditentukan pada bila-bila masa dengan hanya satu koordinat. Kami menganggap bahawa dimensi badan adalah cukup kecil supaya ia boleh dianggap sebagai titik material. Mari kita andaikan bahawa apabila jasad dikeluarkan daripada keseimbangan, daya yang berkadar dengan anjakan dan diarahkan bertentangan dengan anjakan ini -kx akan bertindak ke atasnya. Seperti yang dinyatakan di atas, geseran, rintangan medium boleh diabaikan. Daya dalaman, magnitud dan arah yang ditentukan oleh anjakan dari kedudukan keseimbangan, boleh, sebagai contoh, daya kenyal atau daya yang berbeza, tetapi berubah dengan cara yang sama seperti daya kenyal. Kuasa sedemikian, tanpa mengira sifat mereka, akan dipanggil "kuasi-anjal". Memandangkan kuasa-kuasa ini persamaan pembezaan pergerakan mengambil bentuk
Penyelesaian persamaan pembezaan gerakan mempunyai bentuk fungsi harmonik
Bukti yang kukuh tentang ini diberikan oleh teori persamaan pembezaan, tetapi kita boleh dengan mudah mengesahkan kesahihan pernyataan ini dengan menggantikan penyelesaian ke dalam persamaan.
Seperti yang anda lihat, kesaksamaan akan diperhatikan pada bila-bila masa jika:
Malah, nisbah boleh diwakili sebagai kuasa dua kuantiti tertentu, kerana jisim badan, pekali keanjalan dan, oleh itu, nisbah itu sendiri adalah positif. Kedua-dua pekali k dan jisim badan adalah parameter dalaman sistem ayunan, jadi kekerapan ayunan kitaran w tidak bergantung pada keadaan awal. Hanya amplitud ayunan dan fasa awal bergantung pada keadaan awal, yang boleh didapati dari keadaan awal, seperti yang ditunjukkan sebelum ini. Kelajuan dan pecutan badan semasa ayunan semula jadi juga berubah mengikut undang-undang harmonik:

getaran yang dilembapkan.
Sekarang mari kita ketahui sifat ayunan sistem yang dipertimbangkan dengan adanya geseran. Dalam kes ini, kita akan menganggap bahawa daya geseran adalah berkadar dengan kelajuan badan dan diarahkan bertentangan dengannya. Daya sedemikian, sebagai contoh, adalah daya geseran likat pada halaju badan yang cukup rendah. Jika jasad dikeluarkan dari kedudukan keseimbangan dengan nilai x dan pada masa yang sama mempunyai kelajuan , maka daya seakan-akan akan bertindak ke atasnya. F=-kx dan daya rintangan terhadap pergerakan , di mana, m ialah pekali rintangan. Menurut undang-undang dinamik kedua, kita menulis persamaan pembezaan gerakan
Mari kita perkenalkan notasi dan . Dengan mengambil kira tatatanda ini, persamaan pembezaan mengambil bentuk
Berdasarkan perkara di atas, kita akan mencari penyelesaian persamaan dalam bentuk
Jika ungkapan
sememangnya penyelesaian kepada persamaan, maka selepas menggantikannya kita harus mendapatkan identiti:
Jelas sekali, identiti akan disimpan untuk sebarang masa sewenang-wenangnya jika syarat berikut
Daripada keadaan itu kita memperoleh persamaan pembezaan untuk menentukan amplitud ayunan
Mengasingkan pembolehubah, kami memperoleh persamaan yang sesuai untuk penyepaduan
Penyelesaian kepada persamaan ini ialah fungsi ,
di mana A 0 ialah pemalar pengamiran, yang boleh ditentukan daripada keadaan awal.
kekerapan ayunan benar-benar berbeza daripada kekerapan ayunan semula jadi dan adalah sama dengan
1. Turun naik. turun naik berkala. Getaran harmonik.
2. Getaran percuma. Ayunan yang tidak terendam dan terendam.
3. Getaran paksa. Resonans.
4. Pemetaan proses berayun. Tenaga ayunan harmonik yang tidak terendam.
5. Ayunan sendiri.
6. Ayunan badan manusia dan pendaftarannya.
7. Konsep dan formula asas.
8. Tugasan.
1.1. turun naik. turun naik berkala.
Getaran harmonik
turun naik proses yang berbeza dalam pelbagai peringkat pengulangan dipanggil.
berulang proses berterusan berlaku di dalam mana-mana organisma hidup, contohnya: pengecutan jantung, fungsi paru-paru; kita menggigil apabila kita kesejukan; kita mendengar dan bercakap terima kasih kepada getaran gegendang telinga dan pita suara; bila berjalan kaki kita buat pergerakan berayun. Atom yang membuat kita bergetar. Dunia yang kita diami secara mengejutkan terdedah kepada turun naik.
Bergantung pada sifat fizikal proses berulang, ayunan dibezakan: mekanikal, elektrik, dll. Syarahan ini membincangkan getaran mekanikal.
Turun naik berkala
berkala dipanggil ayunan sedemikian di mana semua ciri pergerakan diulang selepas tempoh masa tertentu.
Untuk ayunan berkala, ciri-ciri berikut digunakan:
tempoh ayunan T, sama dengan masa di mana satu ayunan lengkap berlaku;
kekerapan ayunanν, sama dengan nombor ayunan dibuat dalam satu saat (ν \u003d 1 / T);
amplitud ayunan A, sama dengan anjakan maksimum dari kedudukan keseimbangan.
Getaran harmonik
Tempat istimewa di kalangan turun naik berkala diduduki oleh harmonik turun naik. Kepentingan mereka adalah disebabkan oleh sebab-sebab berikut. Pertama, ayunan dalam alam semula jadi dan teknologi selalunya mempunyai watak yang sangat hampir dengan harmonik, dan kedua, proses berkala dalam bentuk yang berbeza (dengan pergantungan masa yang berbeza) boleh diwakili sebagai superposisi beberapa ayunan harmonik.
Getaran harmonik- ini adalah ayunan di mana nilai yang diperhatikan berubah dalam masa mengikut hukum sinus atau kosinus:
Dalam matematik, fungsi seperti ini dipanggil harmonik, oleh itu, ayunan yang diterangkan oleh fungsi tersebut juga dipanggil harmonik.
Kedudukan jasad yang melakukan gerakan berayun dicirikan oleh anjakan tentang kedudukan keseimbangan. Dalam kes ini, kuantiti dalam formula (1.1) mempunyai makna berikut:
X- berat sebelah badan pada masa t;
A - amplitud turun naik sama dengan anjakan maksimum;
ω - kekerapan bulat ayunan (bilangan ayunan yang dibuat dalam 2 π saat), berkaitan dengan frekuensi ayunan mengikut nisbah
φ = (ωt +φ 0) - fasa turun naik (pada masa t); φ 0 - fasa awal ayunan (pada t = 0).
 nasi. 1.1. Plot ofset lawan masa untuk x(0) = A dan x(0) = 0
nasi. 1.1. Plot ofset lawan masa untuk x(0) = A dan x(0) = 0
 1.2. Getaran percuma. Ayunan yang tidak terendam dan terendam
1.2. Getaran percuma. Ayunan yang tidak terendam dan terendam
percuma atau sendiri dipanggil ayunan sedemikian yang berlaku dalam sistem yang dibiarkan sendiri, selepas ia dikeluarkan daripada keseimbangan.
Contohnya ialah ayunan bola yang digantung pada benang. Untuk menyebabkan getaran, anda perlu sama ada menolak bola, atau, mengalihkannya ke tepi, melepaskannya. Apabila ditolak, bola dimaklumkan kinetik tenaga, dan sekiranya berlaku penyelewengan - potensi.
Ayunan bebas dilakukan kerana rizab tenaga awal.
Getaran tanpa lembap percuma
Ayunan bebas boleh tidak diredam hanya jika tiada daya geseran. Jika tidak, bekalan awal tenaga akan dibelanjakan untuk mengatasinya, dan julat ayunan akan berkurangan.
Sebagai contoh, pertimbangkan getaran jasad yang digantung pada spring tanpa berat, yang berlaku selepas jasad itu terpesong ke bawah dan kemudian dilepaskan (Rajah 1.2).
 nasi. 1.2. Getaran badan pada spring
nasi. 1.2. Getaran badan pada spring
Dari sisi spring yang diregangkan, badan bertindak daya kenyal F berkadar dengan jumlah anjakan X:
Faktor pemalar k dipanggil kadar musim bunga dan bergantung pada saiz dan bahannya. Tanda "-" menunjukkan bahawa daya kenyal sentiasa diarahkan ke arah yang bertentangan dengan arah anjakan, i.e. kepada kedudukan keseimbangan.
Sekiranya tiada geseran, daya kenyal (1.4) adalah satu-satunya daya yang bertindak ke atas badan. Mengikut hukum kedua Newton (ma = F):
 Selepas memindahkan semua sebutan ke sebelah kiri dan membahagikan dengan jisim badan (m), kita memperoleh persamaan pembezaan untuk ayunan bebas tanpa ketiadaan geseran:
Selepas memindahkan semua sebutan ke sebelah kiri dan membahagikan dengan jisim badan (m), kita memperoleh persamaan pembezaan untuk ayunan bebas tanpa ketiadaan geseran:
 Nilai ω 0 (1.6) ternyata sama dengan frekuensi kitaran. Kekerapan ini dipanggil sendiri.
Nilai ω 0 (1.6) ternyata sama dengan frekuensi kitaran. Kekerapan ini dipanggil sendiri.
Oleh itu, getaran bebas tanpa adanya geseran adalah harmoni jika, apabila menyimpang daripada kedudukan keseimbangan, daya kenyal(1.4).
Pekeliling sendiri kekerapan adalah ciri utama ayunan harmonik bebas. Nilai ini hanya bergantung pada sifat sistem ayunan (dalam kes yang dipertimbangkan, pada jisim badan dan kekakuan spring). Dalam perkara berikut, simbol ω 0 akan sentiasa digunakan untuk menandakan kekerapan bulatan sendiri(iaitu, kekerapan getaran akan berlaku jika tiada geseran).
Amplitud getaran bebas ditentukan oleh sifat-sifat sistem ayunan (m, k) dan tenaga yang diberikan kepadanya dalam detik awal masa.
Sekiranya tiada geseran, ayunan bebas yang hampir kepada harmonik juga timbul dalam sistem lain: bandul matematik dan fizikal (teori isu ini tidak dipertimbangkan) (Rajah 1.3).
Bandul matematik- badan kecil titik material), digantung pada benang tanpa berat (Rajah 1.3 a). Jika benang dipesongkan dari kedudukan keseimbangan dengan sudut kecil (sehingga 5°) α dan dilepaskan, maka jasad akan berayun dengan tempoh yang ditentukan oleh formula
 di mana L ialah panjang benang, g ialah pecutan jatuh bebas.
di mana L ialah panjang benang, g ialah pecutan jatuh bebas.
 nasi. 1.3. Bandul matematik (a), bandul fizikal(b)
nasi. 1.3. Bandul matematik (a), bandul fizikal(b)
bandul fizikal- padu, yang berayun di bawah tindakan graviti di sekeliling paksi mengufuk tetap. Rajah 1.3 b secara skematik menunjukkan bandul fizikal dalam bentuk jasad bentuk bebas, menyimpang daripada kedudukan keseimbangan dengan sudut α. Tempoh ayunan bandul fizik diterangkan oleh formula
 di mana J ialah momen inersia jasad terhadap paksi, m ialah jisim, h ialah jarak antara pusat graviti (titik C) dan paksi ampaian (titik O).
di mana J ialah momen inersia jasad terhadap paksi, m ialah jisim, h ialah jarak antara pusat graviti (titik C) dan paksi ampaian (titik O).
Momen inersia ialah kuantiti yang bergantung kepada jisim badan, dimensi dan kedudukannya berbanding dengan paksi putaran. Momen inersia dikira menggunakan formula khas.
Getaran lembap percuma
Daya geseran bertindak masuk sistem sebenar, mengubah sifat pergerakan dengan ketara: tenaga sistem ayunan sentiasa berkurangan, dan ayunan sama ada pudar atau tidak berlaku sama sekali.
Daya rintangan diarahkan ke arah yang bertentangan dengan pergerakan badan, dan pada kelajuan yang tidak terlalu tinggi ia berkadar dengan kelajuan:
 Graf turun naik sedemikian ditunjukkan dalam Rajah. 1.4.
Graf turun naik sedemikian ditunjukkan dalam Rajah. 1.4.
Sebagai ciri tahap pengecilan, kuantiti tanpa dimensi digunakan, dipanggil pengurangan redaman logaritmaλ.
 nasi. 1.4. Anjakan berbanding masa untuk ayunan terlembap
nasi. 1.4. Anjakan berbanding masa untuk ayunan terlembap
Penurunan redaman logaritma sama logaritma semula jadi nisbah amplitud ayunan sebelumnya kepada amplitud ayunan berikutnya.
di mana saya - nombor siri turun naik.
Ia adalah mudah untuk melihatnya penurunan logaritma pengecilan didapati oleh formula
Pengecilan kuat. Pada
jika syarat β ≥ ω 0 dipenuhi, sistem kembali ke kedudukan keseimbangan tanpa berayun. Pergerakan sedemikian dipanggil aperiodik. Rajah 1.5 menunjukkan dua cara yang mungkin kembali ke kedudukan keseimbangan semasa gerakan aperiodik.
 nasi. 1.5. gerakan aperiodik
nasi. 1.5. gerakan aperiodik
1.3. Getaran paksa, resonans
Getaran bebas dengan kehadiran daya geseran diredam. Ayunan berterusan boleh dibuat dengan bantuan tindakan luaran berkala.
terpaksa ayunan sedemikian dipanggil, di mana sistem ayunan terdedah kepada daya berkala luaran (ia dipanggil daya penggerak).
Biarkan daya penggerak berubah mengikut undang-undang harmonik
 Graf ayunan paksa ditunjukkan dalam Rajah. 1.6.
Graf ayunan paksa ditunjukkan dalam Rajah. 1.6.
 nasi. 1.6. Plot anjakan berbanding masa untuk getaran paksa
nasi. 1.6. Plot anjakan berbanding masa untuk getaran paksa
Ia boleh dilihat bahawa amplitud ayunan paksa mencapai nilai yang stabil secara beransur-ansur. Ayunan paksa yang mantap adalah harmonik, dan kekerapannya adalah sama dengan kekerapan daya penggerak:
Amplitud (A) bagi ayunan paksa yang mantap didapati dengan formula:
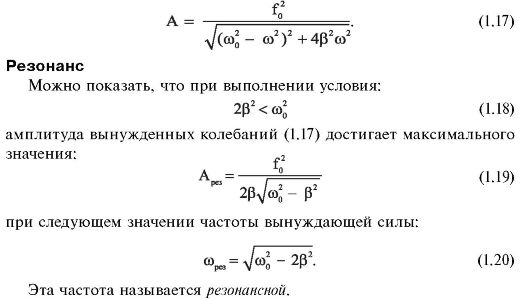 Resonans dipanggil pencapaian amplitud maksimum ayunan paksa pada nilai tertentu kekerapan daya penggerak.
Resonans dipanggil pencapaian amplitud maksimum ayunan paksa pada nilai tertentu kekerapan daya penggerak.
Jika keadaan (1.18) tidak dipenuhi, maka resonans tidak timbul. Dalam kes ini, apabila kekerapan daya penggerak meningkat, amplitud ayunan paksa berkurangan secara monoton, cenderung kepada sifar.
Kebergantungan grafik amplitud A ayunan paksa pada frekuensi bulat daya penggerak pada makna yang berbeza pekali pengecilan (β 1 > β 2 > β 3) ditunjukkan dalam rajah. 1.7. Set graf sedemikian dipanggil lengkung resonans.
Dalam sesetengah kes, peningkatan kuat dalam amplitud ayunan pada resonans adalah berbahaya untuk kekuatan sistem. Terdapat kes apabila resonans membawa kepada kemusnahan struktur.
 nasi. 1.7. Lengkung resonans
nasi. 1.7. Lengkung resonans
1.4. Perbandingan proses berayun. Tenaga ayunan harmonik yang tidak terendam
Jadual 1.1 membentangkan ciri-ciri proses berayun yang dipertimbangkan.
Jadual 1.1. Ciri-ciri getaran bebas dan paksa
 Tenaga ayunan harmonik yang tidak terendam
Tenaga ayunan harmonik yang tidak terendam
Jasad yang melakukan ayunan harmonik mempunyai dua jenis tenaga: tenaga kinetik pergerakan E k \u003d mv 2 / 2 dan tenaga potensi E p yang berkaitan dengan tindakan daya kenyal. Adalah diketahui bahawa di bawah tindakan daya kenyal (1.4) tenaga keupayaan badan ditentukan oleh formula E p = kx 2 /2. Kerana tidak ayunan yang dilembapkan X= A cos(ωt), dan kelajuan jasad ditentukan oleh formula v= - A ωsin(ωt). Daripada ini, ungkapan diperolehi untuk tenaga badan yang melakukan ayunan tanpa lembap:
 Jumlah tenaga sistem di mana ayunan harmonik tidak terendam berlaku ialah jumlah tenaga ini dan kekal tidak berubah:
Jumlah tenaga sistem di mana ayunan harmonik tidak terendam berlaku ialah jumlah tenaga ini dan kekal tidak berubah:
Di sini m ialah jisim badan, ω dan A ialah kekerapan bulat dan amplitud ayunan, k ialah pekali keanjalan.
1.5. Ayunan diri
Terdapat sistem yang sendiri mengawal pengisian semula tenaga yang hilang secara berkala dan oleh itu boleh berubah-ubah untuk masa yang lama.
Ayunan diri- ayunan tidak lembap disokong sumber luar tenaga, alirannya dikawal oleh sistem ayunan itu sendiri.
Sistem di mana ayunan sedemikian berlaku dipanggil berayun sendiri. Amplitud dan kekerapan ayunan sendiri bergantung pada sifat sistem ayunan sendiri itu sendiri. Sistem ayunan sendiri boleh diwakili oleh skema berikut:
 DALAM kes ini sistem ayunan itu sendiri, melalui saluran maklum balas, mempengaruhi pengawal selia tenaga, memaklumkannya tentang keadaan sistem.
DALAM kes ini sistem ayunan itu sendiri, melalui saluran maklum balas, mempengaruhi pengawal selia tenaga, memaklumkannya tentang keadaan sistem.
Maklum balas dipanggil kesan hasil daripada sebarang proses pada perjalanannya.
Jika kesan sedemikian membawa kepada peningkatan dalam keamatan proses, maka Maklum balas dipanggil positif. Jika impak membawa kepada penurunan keamatan proses, maka maklum balas dipanggil negatif.
Dalam sistem berayun sendiri, maklum balas positif dan negatif boleh hadir.
Contoh sistem berayun sendiri ialah jam di mana bandul menerima hentakan disebabkan tenaga berat yang dinaikkan atau spring berpintal, dan kejutan ini berlaku pada saat-saat bandul melepasi kedudukan tengah.
Contoh sistem ayunan diri biologi ialah organ seperti jantung dan paru-paru.
1.6. Ayunan badan manusia dan pendaftarannya
Analisis ayunan yang dicipta oleh badan manusia atau bahagian individunya digunakan secara meluas dalam amalan perubatan.
Pergerakan berayun badan manusia semasa berjalan
Berjalan adalah proses lokomotor berkala yang kompleks terhasil daripada aktiviti selaras otot rangka batang dan anggota badan. Analisis proses berjalan menyediakan banyak ciri diagnostik.
Ciri ciri berjalan ialah ketepatan kedudukan sokongan dengan satu kaki (tempoh sokongan tunggal) atau dua kaki (tempoh sokongan berganda). Biasanya, nisbah tempoh ini ialah 4:1. Apabila berjalan, terdapat anjakan berkala pusat jisim (CM) di sepanjang paksi menegak (biasanya sebanyak 5 cm) dan sisihan ke sisi (biasanya sebanyak 2.5 cm). Dalam kes ini, CM bergerak di sepanjang lengkung, yang boleh diwakili lebih kurang oleh fungsi harmonik (Rajah 1.8).
 nasi. 1.8. Anjakan menegak CM badan manusia semasa berjalan
nasi. 1.8. Anjakan menegak CM badan manusia semasa berjalan
Pergerakan berayun yang kompleks sambil mengekalkan kedudukan menegak badan.
Seseorang yang berdiri tegak mempunyai getaran kompleks pusat jisim biasa (MCM) dan pusat tekanan (CP) berhenti pada satah sokongan. Berdasarkan analisis turun naik ini statokinesimetri- kaedah untuk menilai keupayaan seseorang untuk mengekalkan postur tegak. Dengan mengekalkan unjuran GCM dalam koordinat sempadan kawasan sokongan. Kaedah ini dilaksanakan menggunakan penganalisis stabilometrik, bahagian utamanya ialah platform stabil di mana subjek berada dalam kedudukan menegak. Ayunan yang dibuat oleh CP subjek sambil mengekalkan postur menegak dihantar ke stabiloplatform dan direkodkan oleh tolok terikan khas. Isyarat tolok terikan dihantar ke peranti rakaman. Pada masa yang sama, ia direkodkan statokinesigram - trajektori pergerakan CP subjek pada satah mendatar dalam sistem koordinat dua dimensi. Mengikut spektrum harmonik statokinesigram adalah mungkin untuk menilai ciri-ciri menegak dalam norma dan dengan penyelewengan daripadanya. Kaedah ini memungkinkan untuk menganalisis penunjuk kestabilan statokinetik (SCR) seseorang.
Getaran mekanikal jantung
wujud pelbagai kaedah kajian jantung, yang berdasarkan proses berkala mekanikal.
Ballistocardiography(BCG) - kaedah untuk mengkaji manifestasi mekanikal aktiviti jantung, berdasarkan pendaftaran pergerakan mikro nadi badan, yang disebabkan oleh pelepasan darah dari ventrikel jantung ke dalam saluran besar. Ini menimbulkan fenomena pulangan. Tubuh manusia diletakkan di atas platform boleh alih khas yang terletak di atas meja tetap besar-besaran. Platform akibat daripada berundur datang ke dalam gerakan berayun yang kompleks. Pergantungan anjakan platform dengan badan tepat pada masanya dipanggil ballistocardiogram (Rajah 1.9), analisis yang membolehkan seseorang menilai pergerakan darah dan keadaan aktiviti jantung.
Apexcardiography(AKG) - kaedah pendaftaran grafik ayunan frekuensi rendah dada di kawasan degupan puncak, yang disebabkan oleh kerja jantung. Pendaftaran apexcardiogram dilakukan, sebagai peraturan, pada elektrokardiogram berbilang saluran.
 nasi. 1.9. Merakam ballistocardiogram
nasi. 1.9. Merakam ballistocardiogram
graf menggunakan sensor piezocrystalline, yang merupakan penukar getaran mekanikal kepada getaran elektrik. Sebelum merakam pada dinding anterior dada, titik denyutan maksimum (puncak pukulan) ditentukan oleh palpasi, di mana sensor ditetapkan. Berdasarkan isyarat sensor, apexcardiogram dibina secara automatik. Analisis amplitud ACG dijalankan - amplitud lengkung dibandingkan pada fasa yang berbeza kerja jantung dengan sisihan maksimum dari garis sifar - segmen EO, diambil sebagai 100%. Rajah 1.10 menunjukkan apexcardiogram.
 nasi. 1.10. Rakaman Apexcardiogram
nasi. 1.10. Rakaman Apexcardiogram
Kinetokardiografi(KKG) - kaedah merakam getaran frekuensi rendah dinding dada, disebabkan oleh aktiviti jantung. Kinetocardiogram berbeza daripada apexcardiogram: yang pertama menangkap rekod pergerakan mutlak dinding dada di angkasa, yang kedua mencatatkan turun naik ruang intercostal berbanding dengan tulang rusuk. DALAM kaedah ini pergerakan (KKG x), kelajuan pergerakan (KKG v) serta pecutan (KKG a) untuk ayunan dada ditentukan. Rajah 1.11 menunjukkan perbandingan pelbagai kinetokardiogram.
 nasi. 1.11. Merekod kinetokardiogram anjakan (x), kelajuan (v), pecutan (a)
nasi. 1.11. Merekod kinetokardiogram anjakan (x), kelajuan (v), pecutan (a)
Dinamokardiografi(DKG) - kaedah untuk menilai pergerakan pusat graviti dada. Dynamocardiograph membolehkan anda mendaftarkan daya yang bertindak dari dada manusia. Untuk merekodkan dynamocardiogram, pesakit diletakkan di atas meja berbaring telentang. Di bawah dada terdapat peranti perceiving, yang terdiri daripada dua plat logam tegar berukuran 30x30 cm, di antaranya terdapat unsur elastik dengan tolok terikan dipasang pada mereka. Berubah secara berkala dalam magnitud dan tempat permohonan, beban yang bertindak pada peranti penerima terdiri daripada tiga komponen: 1) komponen malar - jisim dada; 2) pembolehubah - kesan mekanikal pergerakan pernafasan; 3) pembolehubah - proses mekanikal yang mengiringi penguncupan jantung.
Rakaman dynamocardiogram dijalankan dengan pesakit menahan nafas mereka dalam dua arah: berbanding dengan paksi membujur dan melintang peranti penerima. Perbandingan pelbagai dinamokardiogram ditunjukkan dalam rajah. 1.12.
Seismokardiografi adalah berdasarkan pendaftaran getaran mekanikal badan manusia yang disebabkan oleh kerja jantung. Dalam kaedah ini, menggunakan sensor yang dipasang di kawasan pangkal proses xiphoid, impuls jantung direkodkan kerana aktiviti mekanikal jantung semasa tempoh penguncupan. Pada masa yang sama, proses berlaku yang berkaitan dengan aktiviti mekanoreseptor tisu katil vaskular, yang diaktifkan apabila jumlah darah yang beredar berkurangan. Seismocardiosignal membentuk bentuk ayunan sternum.
 nasi. 1.12. Merekodkan dinamokardiogram membujur (a) dan melintang (b) normal
nasi. 1.12. Merekodkan dinamokardiogram membujur (a) dan melintang (b) normal
Getaran
Pengenalan meluas pelbagai mesin dan mekanisme ke dalam kehidupan manusia meningkatkan produktiviti buruh. Walau bagaimanapun, kerja banyak mekanisme dikaitkan dengan kejadian getaran yang dihantar kepada seseorang dan mempunyai kesan berbahaya kepadanya.
Getaran- ayunan paksa badan, di mana sama ada seluruh badan berayun secara keseluruhan, atau bahagian berasingannya berayun dengan amplitud dan frekuensi yang berbeza.
Seseorang sentiasa mengalami pelbagai jenis kesan getaran dalam pengangkutan, di tempat kerja, di rumah. Getaran yang timbul di mana-mana tempat badan (contohnya, tangan pekerja yang memegang jackhammer), diedarkan ke seluruh badan dalam bentuk gelombang elastik. Gelombang ini menyebabkan ubah bentuk berubah-ubah dalam tisu badan. pelbagai jenis(mampatan, ketegangan, ricih, lenturan). Kesan getaran pada seseorang adalah disebabkan oleh banyak faktor yang mencirikan getaran: frekuensi (spektrum frekuensi, frekuensi asas), amplitud, kelajuan dan pecutan titik ayunan, tenaga proses berayun.
Pendedahan berpanjangan kepada getaran menyebabkan gangguan berterusan dalam fungsi fisiologi normal dalam badan. "Penyakit getaran" mungkin berlaku. Penyakit ini membawa kepada beberapa gangguan serius dalam tubuh manusia.
Pengaruh getaran pada badan bergantung pada keamatan, kekerapan, tempoh getaran, tempat aplikasi dan arahnya berhubung dengan badan, postur, serta pada keadaan orang dan ciri-ciri individunya.
Turun naik dengan kekerapan 3-5 Hz menyebabkan tindak balas radas vestibular, gangguan vaskular. Pada frekuensi 3-15 Hz, gangguan yang berkaitan dengan getaran resonans organ individu (hati, perut, kepala) dan badan secara keseluruhan diperhatikan. Turun naik dengan frekuensi 11-45 Hz menyebabkan penglihatan kabur, loya dan muntah. Pada frekuensi melebihi 45 Hz, kerosakan pada saluran otak, peredaran darah terjejas, dsb. Rajah 1.13 menunjukkan julat frekuensi getaran yang mempunyai kesan berbahaya kepada seseorang dan sistem organnya.
 nasi. 1.13. Domain kekerapan kesan berbahaya getaran setiap orang
nasi. 1.13. Domain kekerapan kesan berbahaya getaran setiap orang
Pada masa yang sama, dalam beberapa kes, getaran digunakan dalam perubatan. Sebagai contoh, menggunakan penggetar khas, doktor gigi menyediakan amalgam. Penggunaan peranti getaran frekuensi tinggi membolehkan menggerudi lubang bentuk kompleks dalam gigi.
Getaran juga digunakan dalam urutan. Dengan urutan manual, tisu yang diurut dibawa ke dalam gerakan berayun dengan bantuan tangan ahli terapi urut. Dengan urutan perkakasan, penggetar digunakan, di mana petua digunakan untuk menghantar pergerakan berayun ke badan. pelbagai bentuk. Peranti bergetar dibahagikan kepada peranti untuk getaran umum, menyebabkan seluruh badan bergegar ("kerusi", "katil", "platform", dll.), dan peranti untuk kesan getaran setempat pada bahagian berasingan badan.
Mekanoterapi
Dalam latihan fisioterapi (LFK), simulator digunakan, di mana pergerakan berayun dijalankan pelbagai bahagian badan manusia. Mereka digunakan dalam mekanoterapi - bentuk terapi senaman, salah satu tugasnya ialah pelaksanaan latihan fizikal berdos, berulang secara berirama untuk tujuan latihan atau memulihkan mobiliti pada sendi pada peranti jenis bandul. Asas peranti ini adalah mengimbangi (daripada fr. pengimbang- ayunan, imbangan) bandul, iaitu tuas dua lengan yang melakukan pergerakan berayun (goyang) di sekeliling paksi tetap.
1.7. Konsep dan formula asas
 Sambungan jadual
Sambungan jadual
 Sambungan jadual
Sambungan jadual
 Hujung meja
Hujung meja
 1.8. Tugasan
1.8. Tugasan
1. Berikan contoh sistem ayunan pada manusia.
2. Pada orang dewasa, jantung membuat 70 kontraksi seminit. Tentukan: a) kekerapan kontraksi; b) bilangan pemotongan dalam 50 tahun
Jawapan: a) 1.17 Hz; b) 1.84x10 9 .
3. Berapa panjang yang sepatutnya bandul matematik supaya tempoh ayunannya adalah sama dengan 1 saat?
 4.
Batang homogen lurus nipis sepanjang 1 m digantung pada hujungnya pada paksi. Tentukan: a) berapakah tempoh ayunannya (kecil)? b) berapakah panjang bandul matematik dengan tempoh ayunan yang sama?
4.
Batang homogen lurus nipis sepanjang 1 m digantung pada hujungnya pada paksi. Tentukan: a) berapakah tempoh ayunannya (kecil)? b) berapakah panjang bandul matematik dengan tempoh ayunan yang sama?
 5.
Jasad berjisim 1 kg berayun mengikut hukum x = 0.42 cos (7.40t), di mana t diukur dalam saat, dan x diukur dalam meter. Cari: a) amplitud; b) kekerapan; V) penuh tenaga; d) kinetik dan tenaga keupayaan pada x = 0.16 m.
5.
Jasad berjisim 1 kg berayun mengikut hukum x = 0.42 cos (7.40t), di mana t diukur dalam saat, dan x diukur dalam meter. Cari: a) amplitud; b) kekerapan; V) penuh tenaga; d) kinetik dan tenaga keupayaan pada x = 0.16 m.
 6.
Anggarkan kelajuan yang seorang lelaki sedang berjalan dengan panjang langkah l= 0.65 m Panjang kaki L = 0.8 m; pusat graviti berada pada jarak H = 0.5 m dari kaki. Untuk momen inersia kaki berbanding sendi pinggul, gunakan formula I = 0.2mL 2 .
6.
Anggarkan kelajuan yang seorang lelaki sedang berjalan dengan panjang langkah l= 0.65 m Panjang kaki L = 0.8 m; pusat graviti berada pada jarak H = 0.5 m dari kaki. Untuk momen inersia kaki berbanding sendi pinggul, gunakan formula I = 0.2mL 2 .
 7.
Bagaimanakah anda boleh menentukan jisim badan kecil di atas stesen angkasa jika anda mempunyai jam, spring dan satu set pemberat yang anda boleh gunakan?
7.
Bagaimanakah anda boleh menentukan jisim badan kecil di atas stesen angkasa jika anda mempunyai jam, spring dan satu set pemberat yang anda boleh gunakan?
 8.
Amplitud ayunan terlembap berkurangan dalam 10 ayunan sebanyak 1/10 daripada nilai asalnya. Tempoh ayunan T = 0.4 s. Tentukan penyusutan logaritma dan faktor redaman.
8.
Amplitud ayunan terlembap berkurangan dalam 10 ayunan sebanyak 1/10 daripada nilai asalnya. Tempoh ayunan T = 0.4 s. Tentukan penyusutan logaritma dan faktor redaman.
GOST 24346-80 "Getaran. Istilah dan Definisi" mentakrifkan getaran sebagai "pergerakan titik atau sistem mekanikal, di mana ayunan kuantiti skalar yang mencirikannya berlaku. turun naik nilai skalar dijelaskan sebagai "proses meningkat dan menurun secara bergantian nilai kuantiti."
Banyak proses berayun berada di bawah definisi ini, bermula dengan putaran planet mengelilingi Matahari, berakhir dengan ayunan elektron dalam orbit mengelilingi nukleus. gelombang cahaya, yang membolehkan kita melihat, adalah bersifat berayun. Pasang surut air laut juga turun naik. Dunia, sebahagian besarnya terdiri daripada turun naik.
Getaran untuk peralatan mekanikal boleh:
- berguna - untuk skrin bergetar, pemadat konkrit, pemunggah penggetar kereta api, penggetar bergetar, penggiling getaran dan peralatan getaran lain;
- merosakkan - untuk mekanisme jenis berputar, peralatan pengangkutan, enjin pembakaran dalaman Dan motor elektrik, peralatan kerja logam, mesin metalurgi, bangunan dan struktur, dsb.;
- sumber maklumat tentang keadaan teknikal - aspek maklumat ini membentuk asas diagnostik getaran dan buku teks ini.
Keperluan untuk mengukur getaran mesin timbul pada separuh kedua abad ke-19. Ini disebabkan oleh penampilan kapal wap, yang mempunyai struktur ringan berbanding dengan struktur tanah dan mesin pemacu berkuasa. Kejadian getaran sentiasa tidak menyenangkan anak kapal dan penumpang. Akibat getaran - kemalangan akibat kerosakan bahagian mesin, dengan ketara mengurangkan keyakinan terhadap jenis pengangkutan baru ini, pada masa itu. Selalunya turun naik yang sengit diperhatikan dalam rolling stock pengangkutan kereta api yang sedang membangun.
Pada mulanya, kaedah organoleptik berdasarkan visual atau sensasi sentuhan. Sukar untuk menilai nilai parameter getaran secara subjektif. Kalau boleh analisis perbandingan ketepatan anggaran amplitud getaran tidak melebihi 20%. Skor mutlak sentiasa mengandungi kesilapan besar kerana tidak dikenali komposisi spektrum getaran. Dalam julat frekuensi tinggi, keupayaan seseorang untuk melihat getaran adalah terhad. Seseorang tidak boleh berfungsi sebagai vibrometer yang boleh dipercayai.
Kepekaan terbesar apabila terdedah kepada getaran pada seseorang diperhatikan pada frekuensi 100 ... 300 Hz. Hampir mustahil untuk mengenali kekerapan ayunan jika ayunan ini berlaku pada frekuensi melebihi 5 Hz. Walau bagaimanapun, seseorang berasa tidak selesa apabila berdekatan dengan frekuensi penjanaan mesin yang bertepatan dengan frekuensi resonan bahagian tubuh manusia.
Jika ayunan sangat jarang sehingga mata membezakan setiap ayunan secara berasingan, maka frekuensi ditentukan dengan mengira jumlah ayunan dalam tempoh masa tertentu. Dengan penurunan dalam julat ayunan, ketepatan persepsi visual berkurangan. Kekerapan ayunan dalam julat 25…100 Hz membolehkan untuk membezakan amplitud kecil sehingga 0.1 mm.
Kehadiran getaran telah disahkan oleh pelbagai kaedah visualisasi getaran mekanikal. Julat turun naik yang besar (5 mm dan lebih) boleh ditentukan oleh bayang yang dilemparkan oleh objek pada skrin dalam pancaran sinar selari atau mencapah. Sifat garis lurus yang dilukis di sepanjang kertas yang terletak pada badan mekanisme memungkinkan untuk menganggar secara kualitatif kekerapan dan keamatan getaran (a). Dalam kes ini, getaran direkodkan dalam arah yang berserenjang dengan arah pergerakan pensel. Kelajuan pensel hendaklah semalar mungkin.
Selalunya, untuk mengukur julat anjakan getaran mesin dan mesin pengimbang, vibrometer pegang tangan menggunakan penunjuk dail (b) digunakan. Julat ayunan permukaan bergetar dengan rod penunjuk bersentuhan ditentukan oleh julat ayunan jarum penunjuk. Dengan getaran yang kuat, vibrometer sedemikian cepat gagal.
Jika perlu untuk mendaftarkan amplitud ayunan yang agak besar (0.5…10 mm) dengan ketepatan 0.5 mm pada frekuensi rendah (10…20 Hz), baji pengukur boleh digunakan. Dengan getaran yang berlaku pada frekuensi 8 Hz atau lebih tinggi dalam arah berserenjang dengan getaran(a), mata mengekalkan keupayaan persepsi visual semua kedudukan baji dan jelas melihat titik persilangan peruntukan yang melampau baji di kejauhan l dari permulaan segi tiga. Jika julat ayunan s, ketinggian baji h dan asas L, kemudian dari persamaan segi tiga:
|
(A) |
(b) |
|
(V) |
(G) |




a) skema untuk mengukur amplitud ayunan menggunakan baji pengukur; b, c) contoh memasang baji pengukur pada peralatan; d) mengawal tahap getaran unit hidraulik dengan syiling
Jenis proses berayun
Getaran ialah getaran mekanikal atau pergerakan berulang sesuatu objek di sekeliling kedudukan keseimbangan. Getaran badan disebabkan oleh daya pengujaan. Daya ini dikenakan pada objek dari luar atau timbul di dalamnya.
Proses berayun hendaklah dibahagikan kepada pegun dan tidak pegun. Ayunan tidak pegun dibahagikan kepada jangka panjang, jangka pendek dan peralihan. Contoh proses sementara ialah getaran mekanisme semasa pecutan atau semasa berhenti dan berlari. Proses jangka pendek - mengangkat beban dengan kren atas atau menggerakkan kren. Proses tidak pegun jangka panjang sepadan dengan mod operasi dirian bergolek atau angkat skip relau letupan, apabila beban berubah semasa operasi teknologi.
Proses pegun mempunyai parameter yang tetap dalam masa. Peringkat am, taburan amplitud dan frekuensi yang membentuk getaran untuk proses pegun kekal praktikal tidak berubah dalam jangka pendek - sekurang-kurangnya selama beberapa jam. Proses ini paling tipikal untuk mekanisme berputar.
Proses pegun dibahagikan kepada berkala dan rawak.
Turun naik berkala adalah turun naik di mana setiap nilai kuantiti turun naik berulang melalui selang yang sama masa - tempoh ().
Salah satu jenis ayunan berkala adalah getaran harmonik - turun naik di mana nilai kuantiti berayun berubah mengikut masa mengikut hukum sinus atau kosinus (Rajah 61):
S(t) =Adosa(wt+j),
S(t) =Acos(wt+j),
di mana A - amplitud ayunan (mm); t- masa (saat); j- fasa awal ayunan (rad); w - halaju sudut(rad/sec); wt+j- fasa ayunan (rad).

Amplitud ayunan A- sisihan maksimum parameter turun naik daripada nilai purata. fasa wt+j menentukan keadaan proses berayun pada masa tertentu t. Fasa permulaan j mencirikan keadaan sistem berayun pada saat awal masa t = 0.
Tempoh ayunan T dipanggil tempoh masa terkecil selepas itu sistem berayun kembali kepada keadaan asalnya.
Kekerapan ayunan f dipanggil bilangan getaran dalam satu saat. Jika T ialah tempoh ayunan, maka f = 1/T. Kekerapan diukur dalam hertz (Hz) - satu kitaran sesaat. Satu hayunan penuh ( 2π radian), sinusoid melakukan setiap tempoh T, Oleh itu, kelajuan kepala(atau kekerapan) w= 2π/ T = 2πf.
Bentuk perwakilan ayunan harmonik ditunjukkan pada.
|
x(t)=
A ×dosa(wt+j0
) Kebergantungan matematik |
bentuk sementara |
|
Bentuk spektrum |
bentuk vektor |



Untuk getaran harmonik: A,w, j= const.
Dengan ayunan hampir harmonik (kuasi-harmonik): A,w, j- mengubah fungsi masa, sesetengahnya mungkin tetap, ada yang meningkat atau berkurangan (). Sebagai contoh, amplitud, halaju sudut pada permulaan atau pada hentian mekanisme mencipta ayunan yang terlembap atau meningkat - ayunan dengan amplitud berkurang atau meningkat mengikut masa:
X(t)=A 0 e – β tcos(ω t+φ 0 ) atauX(t)=A 0 e β tcos(ω t+φ 0 )
di mana β – faktor pengecilan.
|
Pada permulaan |
Apabila berhenti |
|
Meningkatkan turun naik |
getaran yang dilembapkan |




Getaran poliharmonik- ayunan yang boleh diwakili sebagai hasil tambah dua atau lebih ayunan harmonik (harmonik), yang frekuensinya ialah gandaan frekuensi asas ().
|
Isyarat pertama x(t) = sin(t) |
Isyarat kedua x(t) = 2×cos(3t) |
|
Jumlah isyarat x(t) = sin(t) + 2×cos(3t) |
Bentuk spektrum |
 |
 |




Bentuk ayunan poliharmonik amat bergantung pada peralihan fasa awal harmonik tambahan, manakala tiada perbezaan dalam perwakilan spektrum ().
|
x(t) = sin(t) + sin(2t) |
 |
|
x(t) = sin(t) + sin(2t + π/2) |
 |


Salah satu jenis ayunan poliharmonik ialah berdegup- penambahan dua ayunan harmonik dengan frekuensi dekat ().
|
sinusoid awal |
|
|
Kejadian "beats" |
|
|
Tb = 2π / |ω1 – ω2| |
 |

Rajah 66 - Pukulan
Masa antara mata A Dan DALAM menentukan saat apabila bilangan kitaran ayunan satu frekuensi akan menjadi satu lebih daripada bilangan kitaran ayunan frekuensi yang lain. Jumlah amplitud ayunan pada saat ini adalah sama dengan sifar. Semakin kecil perbezaan frekuensi antara kedua-dua komponen, semakin besar panjang selang AB. Di tengah-tengah selang, jumlah amplitud sepadan dengan jumlah amplitud ayunan.
Proses rawak - tidak dapat diramalkan dalam komposisi frekuensi dan tahap amplitud, tetapi mengekalkannya ciri statistik(min, varians) semasa proses pemerhatian. Contohnya: peronggaan pada bahagian aliran pam, kerosakan pada galas bergolek, daya geseran dalam galas bergolek dan gelongsor, pergolakan dalam aliran gas atau cecair, dsb.
Proses berayun boleh dibahagikan kepada jenis bergantung kepada sumber tenaga dalam proses ini:
- getaran bebas atau semula jadi - ditentukan oleh parameter dalaman bahagian, jisim dan ketegarannya, yang timbul akibat kesan luaran tunggal pada sistem (selepas sistem dikeluarkan daripada keseimbangan, disebabkan tenaga yang diberikan dari luar), secara nyata keadaan, getaran bebas sentiasa dilembapkan;
- ayunan paksa - disebabkan dan dikekalkan oleh pengaruh luaran yang berubah-ubah (getaran mekanisme rotor yang disebabkan oleh ketidakseimbangan), dengan bekalan tenaga berkala dari luar ke sistem berayun;
- ayunan parametrik - disebabkan oleh perubahan dalam parameter dinamik sistem (kekerasan, jisim atau momen inersia, redaman, dll.), akibatnya pengaruh luar;
- ayunan sendiri - ayunan yang tidak terendam masuk sistem dinamik, disokong oleh tenaga tindakan luaran tidak berkala;
- turun naik rawak yang timbul akibat pengaruh luaran rawak dan (atau) disebabkan oleh parameter rawak sistem;
- getaran kilasan berlaku apabila aci berputar tidak sekata.
Ayunan sendiri berbeza daripada ayunan paksa kerana yang terakhir disebabkan oleh tindakan luaran berkala dan berlaku pada kekerapan tindakan ini, manakala kejadian ayunan diri dan kekerapannya ditentukan oleh sifat dalaman sistem ayunan sendiri itu sendiri. . Sebagai contoh:
- ayunan bandul jam disebabkan oleh tindakan graviti berat kerja jam;
- getaran tali biola di bawah pengaruh busur yang bergerak;
- operasi loceng elektrik, dsb.
Getaran juga dikelaskan: mengikut sifatnya (mekanikal, aerohidrodinamik, elektromagnet, elektrodinamik); mengikut unit struktur (elemen) yang memanggilnya (rotor, blade, bearing, gear).
model - ia adalah bahan atau objek yang diwakili secara mental yang, dalam proses penyelidikan, menggantikan objek asal supaya kajian langsungnya memberikan pengetahuan baru tentang objek asal.
Ciri-ciri getaran mekanisme ditentukan oleh parameter beban luaran dan struktur dalaman interaksi unit dan bahagian. Kajian corak getaran mekanisme bermula dengan model pengiraan universal bagi satu elemen, ditunjukkan dalam .
Komponen model ini ialah:
- Daya F - vektor kuantiti fizikal, yang merupakan ukuran keamatan kesan pada badan badan lain, serta medan. Daya yang dikenakan pada badan adalah punca perubahan kelajuannya atau rupa tekanan di dalamnya.
Daya sebagai kuantiti vektor dicirikan oleh modulus, arah dan titik penggunaan daya. Untuk ayunan berlaku, daya mestilah berubah-ubah dalam magnitud atau arah. Keperluan ini dipenuhi oleh:- kekuatan sifat mekanikal: sentrifugal, kinematik, parametrik, dinamik, daya geseran, daya interaksi hentaman;
- daya asal elektromagnet: magnet, elektrodinamik, magnetostriktif - ditentukan oleh perubahan dalam dimensi linear bahan magnet di bawah pengaruh medan magnet;
- daya asal aerodinamik: daya angkat, daya geseran pada sempadan aliran dan bahagian pegun mesin, denyutan tekanan dalam aliran;
- daya asal hidrodinamik - mempunyai sifat yang sama seperti dalam medium gas, tetapi denyutan tekanan akibat peronggaan ditambah kepada mereka.
Daya kenyal- daya yang timbul dalam badan akibat ubah bentuknya dan cenderung untuk mengembalikan badan kepada keadaan asalnya (menentang ubah bentuk).
daya inersia ialah kuantiti vektor secara berangka sama dengan hasil darab jisim m jasad bahan kepada pecutannya dan diarahkan bertentangan dengan pecutan.
Daya geseran ialah daya yang berlaku apabila dua jasad bersentuhan dan menghalang pergerakan relatifnya.
- Berat - kuantiti fizik skalar yang mencirikan inersia badan dan menentukan berat badan apabila berinteraksi dengan medan graviti.
- Ketegaran - ialah keupayaan elemen struktur untuk menentang ubah bentuk di bawah pengaruh luar. Ciri utama kekakuan ialah pekali kekakuan, sama dengan daya yang menyebabkan anjakan unit pada titik penggunaan daya.
- redaman– keupayaan untuk menyekat getaran (keupayaan untuk menghilangkan tenaga getaran).
Persamaan gerakan untuk model ini adalah seperti berikut:
Komponen pertama persamaan yang diberikan sepadan dengan undang-undang kedua Newton, yang kedua menunjukkan penyerapan getaran, dan yang ketiga - hukum Hooke.
Ciri utama model pengiraan ialah kekerapan ayunan semula jadi. Getaran semula jadi adalah ayunan dalam sistem di bawah pengaruh kuasa dalaman selepas sistem dibawa keluar dari keseimbangan (di bawah keadaan sebenar, ayunan bebas sentiasa dilembapkan). Contoh getaran bebas ialah getaran beban yang dipasang pada spring ().

Kekerapan semula jadi ditentukan oleh jisim dan kekakuan:

Oleh itu, objek jisim besar mempunyai frekuensi ayunan sendiri pada frekuensi rendah, dan objek dengan ketegaran tinggi mempunyai frekuensi ayunan sendiri pada frekuensi tinggi.
Apabila kekerapan ayunan semula jadi bertepatan dengan kekerapan ayunan daya penggerak, a resonans - fenomena peningkatan mendadak dalam amplitud ayunan paksa. Fenomena resonans boleh menyebabkan kemusnahan dalam sistem mekanikal. Untuk mesin berputar, ciri penting ialah kelajuan kritikal- kekerapan putaran aci motor, di mana peningkatan getaran disebabkan oleh kebetulan frekuensi ayunan paksa dan semula jadi. Dalam kes ini, amplitud ayunan meningkat, tetapi tidak terhingga disebabkan oleh redaman getaran oleh unsur-unsur sistem mekanikal. Pada resonans, terdapat perubahan fasa 90 0 antara daya yang menyebabkan resonans dan tindak balas sistem.
Dengan menggunakan daya berkala nilai malar yang meningkat dalam kekerapan dan merekodkan amplitud sesaran pada nilai yang berbeza pekali pengecilan (attenuation coefficient δ= h/2 m), kita memperoleh ciri frekuensi sistem klasik ().

Pada frekuensi pengujaan rendah (), amplitud ayunan hampir tidak berubah. Apabila kekerapan ayunan semula jadi dan paksa bertepatan, amplitud mencapai nilai maksimum, dengan redaman rendah. Apabila redaman meningkat, nilai amplitud berkurangan. Pada redaman maksimum, hampir tidak ada puncak dalam tindak balas frekuensi - sistem sangat lembap. Apabila kekerapan pengujaan meningkat, amplitud berkurangan. Sifat ciri frekuensi ini juga diperhatikan pada sistem berputar.
 Memo "bahagian ucapan bebas"
Memo "bahagian ucapan bebas" Cerita bermaklumat untuk kanak-kanak Ensiklopedia saintifik popular kanak-kanak
Cerita bermaklumat untuk kanak-kanak Ensiklopedia saintifik popular kanak-kanak Memilih ensiklopedia kanak-kanak
Memilih ensiklopedia kanak-kanak