ตำแหน่งสมดุลของลูกตุ้มสปริง การสั่นของลูกตุ้มสปริง
ลูกตุ้มสปริงเป็นจุดวัสดุของมวล ติดอยู่กับสปริงไร้น้ำหนักที่ยืดหยุ่นอย่างยิ่งและมีความแข็ง  . มีสองกรณีที่ง่ายที่สุด: แนวนอน (รูปที่ 15, เอ) และแนวตั้ง (รูปที่ 15, ข) ลูกตุ้ม
. มีสองกรณีที่ง่ายที่สุด: แนวนอน (รูปที่ 15, เอ) และแนวตั้ง (รูปที่ 15, ข) ลูกตุ้ม
ก)
ลูกตุ้มแนวนอน(รูปที่ 15a). เมื่อย้ายสินค้า  ออกจากสมดุล
ออกจากสมดุล  ตามจำนวนเงิน
ตามจำนวนเงิน  ทำหน้าที่ในแนวนอน กลับมา แรงยืดหยุ่น
ทำหน้าที่ในแนวนอน กลับมา แรงยืดหยุ่น
 (กฎของฮุก).
(กฎของฮุก).
สันนิษฐานว่าแนวรองรับที่โหลดสไลด์  ระหว่างการสั่นสะเทือนจะราบรื่นอย่างแน่นอน (ไม่มีแรงเสียดทาน)
ระหว่างการสั่นสะเทือนจะราบรื่นอย่างแน่นอน (ไม่มีแรงเสียดทาน)
ข) ลูกตุ้มแนวตั้ง(รูปที่ 15, ข). ตำแหน่งสมดุลในกรณีนี้มีลักษณะตามเงื่อนไข:

ที่ไหน  - ขนาดของแรงยืดหยุ่นที่กระทำต่อโหลด
- ขนาดของแรงยืดหยุ่นที่กระทำต่อโหลด  เมื่อสปริงยืดแบบคงที่
เมื่อสปริงยืดแบบคงที่  ภายใต้อิทธิพลของแรงโน้มถ่วง
ภายใต้อิทธิพลของแรงโน้มถ่วง  .
.
|
เอ |
|


รูปที่ 15 ลูกตุ้มสปริง: เอ- แนวนอนและ ข- แนวตั้ง
หากสปริงยืดออกและปล่อยโหลด สปริงจะเริ่มแกว่งในแนวตั้ง หากออฟเซ็ต ณ จุดใดเวลาหนึ่งคือ  ,
จากนั้นแรงยืดหยุ่นจะถูกเขียนเป็น
,
จากนั้นแรงยืดหยุ่นจะถูกเขียนเป็น  .
.
ในทั้งสองกรณีเมื่อพิจารณาแล้ว ลูกตุ้มสปริงจะทำการสั่นแบบฮาร์โมนิกด้วยคาบ
 (27)
(27)
และความถี่วัฏจักร
 .
(28)
.
(28)
ในเรื่องตัวอย่างการพิจารณา ลูกตุ้มสปริงเราสามารถสรุปได้ว่าฮาร์มอนิกออสซิลเลชันเป็นการเคลื่อนที่ที่เกิดจากแรงที่เพิ่มขึ้นตามสัดส่วนการกระจัด  . ทางนี้, ถ้าพลังฟื้นฟูดูเหมือนกฎของฮุก
. ทางนี้, ถ้าพลังฟื้นฟูดูเหมือนกฎของฮุก
 (เธอได้ชื่อแรงกึ่งยืดหยุ่น
) จากนั้นระบบจะต้องทำการสั่นแบบฮาร์มอนิกในขณะเคลื่อนผ่านตำแหน่งสมดุล แรงฟื้นฟูจะไม่กระทำต่อร่างกาย อย่างไรก็ตาม ร่างกายจะข้ามตำแหน่งดุลยภาพด้วยความเฉื่อย และแรงฟื้นฟูจะเปลี่ยนทิศทางไปในทิศทางตรงกันข้าม
(เธอได้ชื่อแรงกึ่งยืดหยุ่น
) จากนั้นระบบจะต้องทำการสั่นแบบฮาร์มอนิกในขณะเคลื่อนผ่านตำแหน่งสมดุล แรงฟื้นฟูจะไม่กระทำต่อร่างกาย อย่างไรก็ตาม ร่างกายจะข้ามตำแหน่งดุลยภาพด้วยความเฉื่อย และแรงฟื้นฟูจะเปลี่ยนทิศทางไปในทิศทางตรงกันข้าม
ลูกตุ้มคณิตศาสตร์
รูปที่ 16 ลูกตุ้มคณิตศาสตร์
 ซึ่งทำการแกว่งเล็กน้อยภายใต้การกระทำของแรงโน้มถ่วง (รูปที่ 16)
ซึ่งทำการแกว่งเล็กน้อยภายใต้การกระทำของแรงโน้มถ่วง (รูปที่ 16)
การสั่นของลูกตุ้มดังกล่าวที่มุมโก่งตัวเล็กน้อย  (ไม่เกิน5º) ถือได้ว่าฮาร์โมนิกและความถี่วัฏจักร ลูกตุ้มคณิตศาสตร์:
(ไม่เกิน5º) ถือได้ว่าฮาร์โมนิกและความถี่วัฏจักร ลูกตุ้มคณิตศาสตร์:
 ,
(29)
,
(29)
และระยะเวลา:
 .
(30)
.
(30)
2.3. พลังงานของร่างกายระหว่างการสั่นสะเทือนแบบฮาร์มอนิก
พลังงานที่ส่งไปยังระบบสั่นในระหว่างการกดครั้งแรกจะถูกแปลงเป็นระยะ: พลังงานศักย์ของสปริงที่ผิดรูปจะถูกแปลงเป็นพลังงานจลน์ของโหลดที่เคลื่อนที่และในทางกลับกัน
ให้ลูกตุ้มสปริงทำการสั่นแบบฮาร์มอนิกกับเฟสเริ่มต้น  , เช่น.
, เช่น.  (รูปที่ 17)
(รูปที่ 17)

รูปที่ 17 กฎหมายอนุรักษ์ พลังงานกล
เมื่อลูกตุ้มสปริงสั่น
ที่ค่าเบี่ยงเบนสูงสุดของโหลดจากตำแหน่งสมดุล พลังงานกลทั้งหมดของลูกตุ้ม (พลังงานของสปริงบิดเบี้ยวที่มีความแข็ง  ) เท่ากับ
) เท่ากับ  . เมื่อผ่านตำแหน่งสมดุล (
. เมื่อผ่านตำแหน่งสมดุล (  )
พลังงานศักย์สปริงจะเท่ากับศูนย์ และพลังงานกลทั้งหมดของระบบออสซิลเลเตอร์จะถูกกำหนดเป็น
)
พลังงานศักย์สปริงจะเท่ากับศูนย์ และพลังงานกลทั้งหมดของระบบออสซิลเลเตอร์จะถูกกำหนดเป็น  .
.
รูปที่ 18 แสดงการพึ่งพาของจลนศาสตร์ ศักย์ไฟฟ้า และพลังงานรวม ในกรณีที่การแกว่งของฮาร์มอนิกอธิบายโดยฟังก์ชันตรีโกณมิติของไซน์ (เส้นประ) หรือโคไซน์ (เส้นทึบ)

รูปที่ 18 กราฟของการพึ่งพาเวลาของจลนศาสตร์
และพลังงานศักย์สำหรับการสั่นฮาร์มอนิก
จากกราฟ (รูปที่ 18) พบว่าความถี่ของการเปลี่ยนแปลงของพลังงานจลน์และพลังงานศักย์นั้นสูงเป็นสองเท่าของความถี่ธรรมชาติของการสั่นของฮาร์มอนิก
การเคลื่อนที่แบบสั่นคือการเคลื่อนไหวซ้ำๆ เป็นระยะๆ ดังนั้นการพึ่งพาพิกัดและความเร็วของร่างกายตรงเวลาในระหว่างการแกว่งจึงอธิบายโดยฟังก์ชันของเวลาเป็นระยะ ที่ หลักสูตรโรงเรียนนักฟิสิกส์พิจารณาการสั่นดังกล่าวซึ่งการพึ่งพาและความเร็วของร่างกายเป็นหน้าที่เกี่ยวกับตรีโกณมิติ ![]() ,
, ![]() หรือรวมกันเป็นจำนวนหนึ่ง การสั่นดังกล่าวเรียกว่าฮาร์มอนิก (ฟังก์ชัน
หรือรวมกันเป็นจำนวนหนึ่ง การสั่นดังกล่าวเรียกว่าฮาร์มอนิก (ฟังก์ชัน ![]() และ
และ ![]() มักเรียกว่าฟังก์ชันฮาร์มอนิก) เพื่อแก้ปัญหาการสั่นสะเทือนที่รวมอยู่ในโปรแกรมแบบครบวงจร การสอบของรัฐในวิชาฟิสิกส์คุณต้องรู้คำจำกัดความของคุณสมบัติหลัก การเคลื่อนที่แบบสั่น: แอมพลิจูด คาบ ความถี่ ความถี่วงกลม (หรือวัฏจักร) และเฟสของการแกว่ง ให้เราให้คำจำกัดความเหล่านี้และเชื่อมโยงปริมาณที่แจกแจงด้วยพารามิเตอร์ของการพึ่งพาของร่างกายพิกัดตรงเวลา ซึ่งในกรณีของการสั่นฮาร์มอนิกสามารถแสดงได้เสมอ
มักเรียกว่าฟังก์ชันฮาร์มอนิก) เพื่อแก้ปัญหาการสั่นสะเทือนที่รวมอยู่ในโปรแกรมแบบครบวงจร การสอบของรัฐในวิชาฟิสิกส์คุณต้องรู้คำจำกัดความของคุณสมบัติหลัก การเคลื่อนที่แบบสั่น: แอมพลิจูด คาบ ความถี่ ความถี่วงกลม (หรือวัฏจักร) และเฟสของการแกว่ง ให้เราให้คำจำกัดความเหล่านี้และเชื่อมโยงปริมาณที่แจกแจงด้วยพารามิเตอร์ของการพึ่งพาของร่างกายพิกัดตรงเวลา ซึ่งในกรณีของการสั่นฮาร์มอนิกสามารถแสดงได้เสมอ
โดยที่ และ เป็นตัวเลขบางตัว
แอมพลิจูดของการแกว่งคือค่าเบี่ยงเบนสูงสุดของวัตถุที่แกว่งจากตำแหน่งสมดุล เนื่องจากค่าสูงสุดและต่ำสุดของโคไซน์ใน (11.1) เท่ากับ ±1 ดังนั้นแอมพลิจูดของการแกว่งของร่างกายที่แกว่ง (11.1) จึงเท่ากับ . ระยะเวลาการสั่นคือเวลาต่ำสุดหลังจากที่การเคลื่อนไหวของร่างกายซ้ำแล้วซ้ำอีก สำหรับการพึ่งพา (11.1) ระยะเวลาสามารถกำหนดได้จากข้อควรพิจารณาต่อไปนี้ โคไซน์ - ฟังก์ชั่นเป็นระยะกับช่วงเวลา ดังนั้นการเคลื่อนไหวซ้ำแล้วซ้ำอีกอย่างสมบูรณ์ด้วยค่าที่ . จากนี้ไปเราจะได้
ความถี่การสั่นแบบวงกลม (หรือแบบวนรอบ) คือจำนวนการแกว่งต่อหน่วยเวลา จากสูตร (11.3) เราสรุปได้ว่าความถี่วงกลมคือค่าจากสูตร (11.1)
เฟสการสั่นเป็นอาร์กิวเมนต์ของฟังก์ชันตรีโกณมิติที่อธิบายการพึ่งพาพิกัดตรงเวลา จากสูตร (11.1) เราจะเห็นว่าระยะการแกว่งของร่างกายซึ่งการเคลื่อนที่อธิบายโดยการพึ่งพา (11.1) มีค่าเท่ากับ  . ค่าของเฟสการสั่น ณ เวลา = 0 เรียกว่าเฟสเริ่มต้น สำหรับการพึ่งพา (11.1) ระยะเริ่มต้นของการแกว่งจะเท่ากับค่า เห็นได้ชัดว่าช่วงเริ่มต้นของการแกว่งขึ้นอยู่กับการเลือกจุดอ้างอิงเวลา (ช่วงเวลา = 0) ซึ่งเป็นเงื่อนไขเสมอ โดยการเปลี่ยนที่มาของการอ้างอิงเวลา เฟสเริ่มต้นของการแกว่งสามารถ "สร้าง" ได้เท่ากับศูนย์เสมอ และไซน์ในสูตร (11.1) จะถูก "เปลี่ยน" เป็นโคไซน์หรือในทางกลับกัน
. ค่าของเฟสการสั่น ณ เวลา = 0 เรียกว่าเฟสเริ่มต้น สำหรับการพึ่งพา (11.1) ระยะเริ่มต้นของการแกว่งจะเท่ากับค่า เห็นได้ชัดว่าช่วงเริ่มต้นของการแกว่งขึ้นอยู่กับการเลือกจุดอ้างอิงเวลา (ช่วงเวลา = 0) ซึ่งเป็นเงื่อนไขเสมอ โดยการเปลี่ยนที่มาของการอ้างอิงเวลา เฟสเริ่มต้นของการแกว่งสามารถ "สร้าง" ได้เท่ากับศูนย์เสมอ และไซน์ในสูตร (11.1) จะถูก "เปลี่ยน" เป็นโคไซน์หรือในทางกลับกัน
 โปรแกรมการสอบแบบรวมศูนย์ยังรวมถึงความรู้เกี่ยวกับสูตรสำหรับความถี่การสั่นของสปริงและลูกตุ้มคณิตศาสตร์ เป็นเรื่องปกติที่จะเรียกลูกตุ้มสปริงว่าเป็นวัตถุที่สามารถแกว่งไปมาบนพื้นผิวแนวนอนที่เรียบได้ภายใต้การกระทำของสปริง ซึ่งปลายที่สองได้รับการแก้ไข (รูปซ้าย) ลูกตุ้มทางคณิตศาสตร์เป็นวัตถุขนาดใหญ่ซึ่งมีขนาดที่สามารถละเลยได้ แกว่งไปมาบนเกลียวที่ยาว ไร้น้ำหนัก และขยายไม่ได้ (รูปขวา) ชื่อของระบบนี้ - "ลูกตุ้มคณิตศาสตร์" เกิดจากการที่มันเป็นนามธรรม คณิตศาสตร์รุ่นจริง ( ทางกายภาพ) ของลูกตุ้ม จำเป็นต้องจำสูตรสำหรับคาบ (หรือความถี่) ของการแกว่งของสปริงและลูกตุ้มทางคณิตศาสตร์ สำหรับลูกตุ้มสปริง
โปรแกรมการสอบแบบรวมศูนย์ยังรวมถึงความรู้เกี่ยวกับสูตรสำหรับความถี่การสั่นของสปริงและลูกตุ้มคณิตศาสตร์ เป็นเรื่องปกติที่จะเรียกลูกตุ้มสปริงว่าเป็นวัตถุที่สามารถแกว่งไปมาบนพื้นผิวแนวนอนที่เรียบได้ภายใต้การกระทำของสปริง ซึ่งปลายที่สองได้รับการแก้ไข (รูปซ้าย) ลูกตุ้มทางคณิตศาสตร์เป็นวัตถุขนาดใหญ่ซึ่งมีขนาดที่สามารถละเลยได้ แกว่งไปมาบนเกลียวที่ยาว ไร้น้ำหนัก และขยายไม่ได้ (รูปขวา) ชื่อของระบบนี้ - "ลูกตุ้มคณิตศาสตร์" เกิดจากการที่มันเป็นนามธรรม คณิตศาสตร์รุ่นจริง ( ทางกายภาพ) ของลูกตุ้ม จำเป็นต้องจำสูตรสำหรับคาบ (หรือความถี่) ของการแกว่งของสปริงและลูกตุ้มทางคณิตศาสตร์ สำหรับลูกตุ้มสปริง
ความยาวของด้ายอยู่ที่ไหนคือความเร่ง ตกฟรี. พิจารณาการประยุกต์ใช้คำจำกัดความและกฎหมายเหล่านี้กับตัวอย่างการแก้ปัญหา
เพื่อหาความถี่วัฏจักรของโหลดใน งาน 11.1.1ให้เราหาคาบการสั่นก่อนแล้วจึงใช้สูตร (11.2) ตั้งแต่ 10 ม. 28 วินาที คือ 628 วินาที และในช่วงเวลานี้ โหลดทำให้เกิดการแกว่ง 100 ครั้ง ระยะเวลาของการสั่นของโหลดคือ 6.28 วินาที ดังนั้นความถี่การสั่นแบบวนคือ 1 วินาที -1 (คำตอบ 2 ). ที่ งาน 11.1.2โหลดทำ 60 oscillations ใน 600 s ดังนั้นความถี่การสั่นคือ 0.1 s -1 (คำตอบ 1 ).
ให้เข้าใจสิ่งที่ ทางจะผ่านไปขนส่งสินค้า 2.5 งวด ( งาน 11.1.3) ติดตามความเคลื่อนไหวของมัน หลังจากช่วงเวลาหนึ่ง โหลดจะกลับสู่จุดโก่งตัวสูงสุด ทำให้เกิดการแกว่งที่สมบูรณ์ ดังนั้นในช่วงนี้ภาระ จะผ่านระยะทางเท่ากับสี่แอมพลิจูด: ไปยังตำแหน่งสมดุล - หนึ่งแอมพลิจูดจากตำแหน่งสมดุลถึงจุดเบี่ยงเบนสูงสุดในทิศทางอื่น - ที่สองกลับไปที่ตำแหน่งสมดุล - ที่สามจากตำแหน่งสมดุลไปยังจุดเริ่มต้น - ที่สี่. ในช่วงที่สอง โหลดจะผ่านสี่แอมพลิจูดอีกครั้ง และสำหรับครึ่งที่เหลือของคาบนั้น - สองแอมพลิจูด ดังนั้นระยะทางที่เดินทางจึงเท่ากับสิบแอมพลิจูด (คำตอบ 4 ).
ปริมาณการเคลื่อนไหวของร่างกายคือระยะทางจากจุดเริ่มต้นไปยังจุดสิ้นสุด สำหรับ 2.5 งวดใน งาน 11.1.4ร่างกายจะมีเวลาทำการสั่นเต็มสองครั้งครึ่งนั่นคือ จะอยู่ที่ส่วนเบี่ยงเบนสูงสุด แต่อยู่อีกด้านหนึ่งของตำแหน่งสมดุล ดังนั้น ปริมาณการกระจัดจึงเท่ากับสองแอมพลิจูด (คำตอบ 3 ).
ตามคำจำกัดความ เฟสของการแกว่งคืออาร์กิวเมนต์ของฟังก์ชันตรีโกณมิติ ซึ่งอธิบายการพึ่งพาพิกัดของวัตถุที่สั่นตามเวลา ดังนั้น คำตอบที่ถูกต้องคือ งาน 11.1.5 - 3 .
คาบคือเวลาของการแกว่งที่สมบูรณ์ ซึ่งหมายความว่าการกลับมาของร่างกายกลับไปยังจุดเดิมที่ร่างกายเริ่มเคลื่อนไหวไม่ได้หมายความว่าช่วงเวลานั้นผ่านไปแล้ว: ร่างกายจะต้องกลับสู่จุดเดิมด้วยความเร็วเท่าเดิม ตัวอย่างเช่น ร่างกายที่เริ่มแกว่งจากตำแหน่งสมดุล ในช่วงเวลานั้นจะมีเวลาเบี่ยงเบนตามค่าสูงสุดในทิศทางเดียว ย้อนกลับ เบี่ยงเบนไปที่ค่าสูงสุดในอีกทิศทางหนึ่ง แล้วกลับมาใหม่อีกครั้ง ดังนั้นในช่วงเวลานั้น ร่างกายจะมีเวลาเบี่ยงสองครั้งตามค่าสูงสุดจากตำแหน่งสมดุลแล้วกลับคืนมา ดังนั้นทางเดินจากตำแหน่งสมดุลไปยังจุดเบี่ยงเบนสูงสุด ( งาน 11.1.6) ร่างกายใช้เวลาส่วนที่สี่ของช่วงเวลา (คำตอบ 3 ).
การสั่นดังกล่าวเรียกว่าฮาร์มอนิกซึ่งการพึ่งพาพิกัดของร่างกายที่สั่นตามเวลานั้นอธิบายโดยฟังก์ชันตรีโกณมิติ (ไซน์หรือโคไซน์) ของเวลา ที่ งาน 11.1.7เหล่านี้เป็นฟังก์ชัน และ แม้ว่าข้อเท็จจริงที่ว่าพารามิเตอร์ที่รวมอยู่ในนั้นจะแสดงเป็น 2 และ 2 ฟังก์ชันนี้เป็นฟังก์ชันตรีโกณมิติของกำลังสองของเวลา ดังนั้นความผันผวนของปริมาณเท่านั้นและมีความสอดคล้องกัน (คำตอบ 4 ).
ด้วยความสั่นของฮาร์โมนิก ความเร็วของร่างกายจึงเปลี่ยนแปลงไปตามกฎหมาย  , โดยที่แอมพลิจูดของการแกว่งของความเร็วอยู่ที่ไหน (การอ้างอิงเวลาถูกเลือกเพื่อให้เฟสเริ่มต้นของการแกว่งจะเท่ากับศูนย์) จากนี้ไปเราจะพบการพึ่งพาอาศัยกัน พลังงานจลน์ร่างกายจากเวลา
, โดยที่แอมพลิจูดของการแกว่งของความเร็วอยู่ที่ไหน (การอ้างอิงเวลาถูกเลือกเพื่อให้เฟสเริ่มต้นของการแกว่งจะเท่ากับศูนย์) จากนี้ไปเราจะพบการพึ่งพาอาศัยกัน พลังงานจลน์ร่างกายจากเวลา  (งาน 11.1.8). ใช้ที่รู้จักกันดี สูตรตรีโกณมิติ, เราได้รับ
(งาน 11.1.8). ใช้ที่รู้จักกันดี สูตรตรีโกณมิติ, เราได้รับ
จากสูตรนี้เองที่พลังงานจลน์ของร่างกายเปลี่ยนแปลงระหว่างการสั่นของฮาร์มอนิกก็เป็นไปตามกฎฮาร์มอนิกเช่นกัน แต่มีความถี่สองเท่า (คำตอบคือ 2 ).
เบื้องหลังอัตราส่วนระหว่างพลังงานจลน์ของโหลดและพลังงานศักย์ของสปริง ( งาน 11.1.9) สามารถติดตามได้โดยง่ายจากข้อควรพิจารณาต่อไปนี้ เมื่อร่างกายเบี่ยงเบนโดยปริมาณสูงสุดจากตำแหน่งสมดุล ความเร็วของร่างกายจะเป็นศูนย์ ดังนั้น พลังงานศักย์ของสปริงจึงมากกว่าพลังงานจลน์ของโหลด ในทางตรงกันข้าม เมื่อร่างกายผ่านตำแหน่งสมดุล พลังงานศักย์ของสปริงจะเป็นศูนย์ ดังนั้นพลังงานจลน์จึงมากกว่าพลังงานศักย์ ดังนั้น ระหว่างทางเดินของตำแหน่งสมดุลและการเบี่ยงเบนสูงสุด พลังงานจลน์และพลังงานศักย์จะถูกเปรียบเทียบครั้งเดียว และเนื่องจากในช่วงเวลาที่ร่างกายผ่านสี่ครั้งจากตำแหน่งสมดุลไปยังส่วนเบี่ยงเบนสูงสุดหรือในทางกลับกัน จากนั้นในช่วงเวลานั้นพลังงานจลน์ของโหลดและพลังงานศักย์ของสปริงจะถูกเปรียบเทียบกันสี่ครั้ง (คำตอบคือ 2 ).
ความกว้างของความผันผวนของความเร็ว ( งาน 11.1.10) หาได้ง่ายที่สุดโดยกฎการอนุรักษ์พลังงาน ที่จุดโก่งตัวสูงสุด พลังงานของระบบออสซิลเลเตอร์จะเท่ากับพลังงานศักย์ของสปริง  โดยที่ค่าสัมประสิทธิ์ความแข็งของสปริงคือแอมพลิจูดการแกว่ง เมื่อผ่านตำแหน่งสมดุลพลังงานของร่างกายจะเท่ากับพลังงานจลน์
โดยที่ค่าสัมประสิทธิ์ความแข็งของสปริงคือแอมพลิจูดการแกว่ง เมื่อผ่านตำแหน่งสมดุลพลังงานของร่างกายจะเท่ากับพลังงานจลน์  ที่ซึ่งมวลของร่างกายคือความเร็วของร่างกายเมื่อผ่านตำแหน่งสมดุลซึ่งก็คือ ความเร็วสูงสุดร่างกายอยู่ในกระบวนการแกว่ง ดังนั้น จึงหมายถึงแอมพลิจูดของการแกว่งของความเร็ว เมื่อเทียบพลังงานเหล่านี้ เราพบว่า
ที่ซึ่งมวลของร่างกายคือความเร็วของร่างกายเมื่อผ่านตำแหน่งสมดุลซึ่งก็คือ ความเร็วสูงสุดร่างกายอยู่ในกระบวนการแกว่ง ดังนั้น จึงหมายถึงแอมพลิจูดของการแกว่งของความเร็ว เมื่อเทียบพลังงานเหล่านี้ เราพบว่า
(คำตอบ 4 ).
จากสูตร (11.5) เราสรุป ( งาน 11.2.2) ว่าคาบของมันไม่ได้ขึ้นอยู่กับมวลของลูกตุ้มคณิตศาสตร์ และด้วยความยาวที่เพิ่มขึ้น 4 เท่า ระยะเวลาการแกว่งจะเพิ่มขึ้น 2 เท่า (คำตอบคือ 1 ).
นาฬิกาคือ กระบวนการสั่นซึ่งใช้ในการวัดช่วงเวลา ( งาน 11.2.3). คำว่า นาฬิกา "วิ่ง" หมายความว่า ช่วงเวลาของกระบวนการนี้ น้อยกว่านั้นสิ่งที่ควรจะเป็น ดังนั้น เพื่อชี้แจงเส้นทางของนาฬิกาเหล่านี้ จึงจำเป็นต้องเพิ่มระยะเวลาของกระบวนการ ตามสูตร (11.5) เพื่อเพิ่มระยะเวลาการแกว่งของลูกตุ้มคณิตศาสตร์ จำเป็นต้องเพิ่มความยาว (คำตอบคือ 3 ).
เพื่อหาแอมพลิจูดของการแกว่งใน งาน 11.2.4จำเป็นต้องเป็นตัวแทนของการพึ่งพาร่างกายตรงเวลาในรูปแบบของฟังก์ชันตรีโกณมิติเดียว สำหรับฟังก์ชันที่ให้ไว้ในเงื่อนไข สามารถทำได้โดยการเพิ่มมุมเพิ่มเติม การคูณและหารฟังก์ชันนี้ด้วย  และใช้สูตรบวก ฟังก์ชันตรีโกณมิติ, เราได้รับ
และใช้สูตรบวก ฟังก์ชันตรีโกณมิติ, เราได้รับ
|

มุมไหนที่ว่า  . จากสูตรนี้ จะได้ว่าแอมพลิจูดของการแกว่งตัวของร่างกายคือ
. จากสูตรนี้ จะได้ว่าแอมพลิจูดของการแกว่งตัวของร่างกายคือ  (คำตอบ 4
).
(คำตอบ 4
).
สวัสดีตอนบ่าย!
ทุกอย่างค่อนข้างง่าย ตอนนี้ฉันอาจจะพูดไม่กี่ คำประสมแต่แล้วฉันจะพยายามอธิบายความหมายของพวกเขา เพื่อความง่ายในการนำเสนอ เราจะพูดถึงกรณีหนึ่งมิติ ซึ่งทุกอย่างสามารถสรุปได้ง่ายถึงกรณีที่มีอิสระหลายระดับ
ดังนั้น, งานหลักกลศาสตร์ --- เพื่อค้นหาการพึ่งพาพิกัดของร่างกายตรงเวลา นั่นคือ ในความเป็นจริง เพื่อค้นหาฟังก์ชันบางอย่างที่เชื่อมโยงค่าบางอย่างของพิกัดกับแต่ละช่วงเวลา เราอธิบายการเคลื่อนไหวใดๆ โดยใช้กฎข้อที่สองของนิวตัน กฎข้อนี้รวมถึงการเร่งความเร็ว ซึ่งเป็นอนุพันธ์อันดับสองของพิกัดของร่างกายเทียบกับเวลา และแรง ซึ่งมักจะขึ้นอยู่กับพิกัดนั้นเอง นอกจากนี้ แรงอาจขึ้นอยู่กับความเร็วของร่างกาย นั่นคือ อนุพันธ์อันดับแรกของพิกัดเทียบกับเวลา ดังนั้นด้วย จุดทางคณิตศาสตร์กฎข้อที่สองของนิวตันแสดงถึงความสัมพันธ์บางอย่างระหว่างพิกัด อนุพันธ์อันดับหนึ่งและอนุพันธ์อันดับสอง ความสัมพันธ์นี้เรียกว่าในวิชาคณิตศาสตร์ สมการเชิงอนุพันธ์. อนุพันธ์สูงสุดที่รวมอยู่ในสมการดังกล่าวคืออันดับที่สอง คณิตศาสตร์บอกว่าการแก้สมการนั้นคือ แบบฟอร์มทั่วไปฟังก์ชั่นที่ตอบสนองความสัมพันธ์ของเราขึ้นอยู่กับค่าคงที่สองค่าที่ไม่สามารถหาได้จากสมการ ค่าคงที่ตามอำเภอใจเหล่านี้ถูกกำหนดเป็นกรณี ๆ ไป ตัวอย่างเช่น โดยใช้เงื่อนไขเริ่มต้นที่เรียกว่า นั่นคือเพื่อที่จะเข้าใจอย่างชัดเจนว่าร่างกายจะเคลื่อนไหวอย่างไร คุณจำเป็นต้องรู้ว่าไม่เพียงแต่กองกำลังที่กระทำต่อมันเท่านั้น แต่ยังต้องทราบด้วยว่าพิกัดและความเร็วเริ่มต้นของมันเป็นอย่างไร ค่าคงที่ตามอำเภอใจสองค่าในสารละลายถูกเลือกในลักษณะที่ฟังก์ชันที่เราได้มาและอนุพันธ์ของมัน (นั่นคือความเร็ว) ใน ช่วงเวลาเริ่มต้นเวลาได้ให้คุณค่า
มันแน่นอน สถานการณ์ทั่วไป. จำไว้เมื่อเราพูดถึงการเคลื่อนไหวของร่างกายด้วย ความเร่งคงที่เพื่อที่จะกำหนดการเคลื่อนที่ได้อย่างแม่นยำ เราจำเป็นต้องมีตัวเลขสองตัวพอดี คือ พิกัดเริ่มต้น และ ความเร็วเริ่มต้น.
เช่นเดียวกับการสั่น การแกว่งของลูกตุ้มเฉพาะ (นั่นคือ ลูกตุ้มที่มีความถี่ธรรมชาติที่กำหนด) ถูกกำหนดด้วยตัวเลขสองตัวเช่นกัน โดยปกติ คำตอบของสมการลูกตุ้มที่ได้จากกฎข้อที่สองของนิวตันจะเขียนเป็น
ที่นี่พวกเขาเล่นบทบาทของค่าคงที่โดยพลการซึ่งต้องพิจารณาจากเงื่อนไขเริ่มต้น มาคำนวณความเร็วกัน: . แจ้งให้เราทราบว่าใน ช่วงเวลาเป็นศูนย์เวลา พิกัดและความเร็วของลูกตุ้มมีค่าเท่ากัน และ . เมื่อแก้ระบบสมการธรรมดาแล้ว เราสามารถหานิพจน์เฉพาะสำหรับและผ่านและ
ฉันจะไม่ให้คำตอบ กรณีทั่วไปถ้าคุณต้องการคุณสามารถทำมันเองได้อย่างง่ายดาย ฉันจะพูดถึงเฉพาะบางกรณีเท่านั้น ตัวอย่างเช่น เป็นที่ทราบกันดีอยู่แล้วว่าในช่วงเวลาศูนย์ของเวลาที่ร่างกายอยู่ในสภาวะสมดุล (นั่นคือ ) และความเร็วของมันเท่ากับค่าสูงสุด (นั่นคือ ) จากนั้นเราได้รับสำหรับกรณีเฉพาะของเราว่าระบบสมการอยู่ในรูปแบบ: . จากสมการแรกจะชัดเจนในทันทีว่า (แน่นอนว่าสมการแรกเป็นไปตามเงื่อนไขด้วย แต่จากนั้นคำตอบของเราจะกลายเป็นศูนย์ แต่นี่ไม่เหมาะกับเรา) ที่สองจะใช้รูปแบบ: , ที่ไหน . ดังนั้นเราจึงพบนิพจน์สำหรับค่าคงที่ทั้งสอง เป็นผลให้เรามี: ในเวลาเดียวกันสำหรับการเร่งความเร็วปรากฎ หากตอนนี้เราแสดงด้วยนิพจน์ที่คุ้นเคยสำหรับแอมพลิจูด เราจะได้สูตรที่คุ้นเคยมากขึ้น
ลองพิจารณาอีกตัวอย่างหนึ่ง ตอนนี้ให้สินค้าเข้า ตำแหน่งสุดขั้วนั่นคือความเร็วของมันคือศูนย์ เราจะถือว่ามันเบี่ยงเบนไปจาก ด้านลบแกน นั่นคือ พิกัดของมันคือ . แล้วสมการของ เงื่อนไขเบื้องต้นใช้แบบฟอร์ม: จากสมการที่สอง จากครั้งแรก: . ดังนั้นสำหรับพิกัดมี: (ความเท่าเทียมกันที่สองโดยใช้สูตรการลด) เพื่อความรวดเร็ว: . เพื่อเพิ่มความเร็ว: .
สูตรเฉพาะขึ้นอยู่กับข้อมูลเบื้องต้น พิจารณาคาบของไซน์และโคไซน์โดยใช้ สูตรต่างๆแคสต์ คุณสามารถลบเครื่องหมายออกจากสูตร เพิ่มเฟส ฯลฯ
สำหรับสูตรในปัญหานั้นไม่มี , ความถี่ เนื่องจากค่าเฉพาะจะถูกแทนที่:
การสั่นสะเทือนฟรีถูกผลิตขึ้นภายใต้อิทธิพล กองกำลังภายในระบบหลังจากที่ระบบถูกนำออกจากสมดุลแล้ว
ถึงการสั่นสะเทือนอิสระเกิดขึ้นตามกฎฮาร์โมนิก มันเป็นสิ่งจำเป็นที่แรงที่ผลักให้ร่างกายกลับสู่ตำแหน่งสมดุลควรเป็นสัดส่วนกับการกระจัดของร่างกายจากตำแหน่งสมดุลและชี้ไปในทิศทางตรงกันข้ามกับการกระจัด (ดู§ 2.1):
ความแข็งแกร่งของใครๆ ลักษณะทางกายภาพสนองสภาพนี้เรียกว่า กึ่งยืดหยุ่น .
ดังนั้นภาระของมวล มติดอยู่กับสปริงที่ทำให้แข็งทื่อ kปลายที่สองซึ่งคงที่ไม่เคลื่อนที่ (รูปที่ 2.2.1) เป็นระบบที่สามารถทำการสั่นของฮาร์มอนิกได้อย่างอิสระในกรณีที่ไม่มีแรงเสียดทาน มวลบนสปริงเรียกว่า ฮาร์มอนิกเชิงเส้น ออสซิลเลเตอร์.
ความถี่วงกลม ω 0 การสั่นสะเทือนฟรีน้ำหนักของสปริงหาได้จากกฎข้อที่สองของนิวตัน:
ด้วยการจัดเรียงระบบสปริงโหลดในแนวนอน แรงโน้มถ่วงที่ใช้กับโหลดจะได้รับการชดเชยด้วยแรงปฏิกิริยาของตัวรองรับ หากโหลดถูกระงับในสปริง แรงโน้มถ่วงจะพุ่งไปตามแนวการเคลื่อนที่ของโหลด ในตำแหน่งดุลยภาพ สปริงยืดออกจำนวนหนึ่ง x 0 เท่ากับ
ดังนั้น กฎข้อที่สองของนิวตันสำหรับการโหลดบนสปริงสามารถเขียนได้เป็น
สมการ (*) เรียกว่า สมการของการแกว่งอิสระ . ควรสังเกตว่า คุณสมบัติทางกายภาพระบบสั่น กำหนดเฉพาะความถี่ธรรมชาติของการแกว่ง ω 0 หรือคาบ ตู่ . พารามิเตอร์ดังกล่าวของกระบวนการสั่นเป็นแอมพลิจูด x m และเฟสเริ่มต้น φ 0 ถูกกำหนดโดยวิธีที่ระบบถูกนำออกจากสมดุลในช่วงเวลาเริ่มต้น
ตัวอย่างเช่น ถ้าโหลดถูกแทนที่จากตำแหน่งสมดุลด้วยระยะทาง Δ lและเมื่อถึงเวลานั้น t= 0 ปล่อยโดยไม่มีความเร็วเริ่มต้น แล้ว xม = ∆ l, φ 0 = 0
อย่างไรก็ตาม หากความเร็วเริ่มต้น ± υ 0 ถูกมอบให้กับโหลด ซึ่งอยู่ในตำแหน่งสมดุล โดยใช้แรงกดที่แหลมคม
ดังนั้นแอมพลิจูด x m การแกว่งอิสระและเฟสเริ่มต้น φ 0 ถูกกำหนด เงื่อนไขเบื้องต้น .
ระบบออสซิลเลเตอร์ทางกลมีหลายประเภทที่ใช้แรงของการเปลี่ยนรูปแบบยืดหยุ่น ในรูป 2.2.2 แสดงแอนะล็อกเชิงมุมของออสซิลเลเตอร์ฮาร์มอนิกเชิงเส้น ดิสก์ที่วางในแนวนอนแขวนอยู่บนเกลียวยางยืดซึ่งจับจ้องอยู่ที่จุดศูนย์กลางมวล เมื่อจานหมุนเป็นมุม θ จะเกิดโมเมนต์แรงขึ้น เอ็มความเครียดแรงบิดยืดหยุ่น:
ที่ไหน ฉัน = ฉัน C - โมเมนต์ความเฉื่อยของดิสก์รอบแกนที่ผ่านจุดศูนย์กลางมวล ε - ความเร่งเชิงมุม
โดยการเปรียบเทียบกับโหลดในสปริง คุณจะได้รับ:
การสั่นสะเทือนฟรี ลูกตุ้มคณิตศาสตร์
ลูกตุ้มคณิตศาสตร์เรียกว่า ร่างเล็ก ห้อยอยู่บนเส้นด้ายบาง ๆ ที่ไม่สามารถยืดออกได้ ซึ่งมวลของมันนั้นเล็กน้อยเมื่อเทียบกับมวลของร่างกาย ในตำแหน่งสมดุล เมื่อลูกตุ้มห้อยอยู่บนแนวดิ่ง แรงโน้มถ่วงจะสมดุลโดยแรงตึงของเกลียว เมื่อลูกตุ้มเบี่ยงเบนจากตำแหน่งสมดุลด้วยมุมหนึ่ง φ ส่วนประกอบในแนวสัมผัสของแรงโน้มถ่วงจะปรากฏขึ้น F τ = - มก.บาป φ (รูปที่ 2.3.1) เครื่องหมายลบในสูตรนี้หมายความว่าส่วนประกอบสัมผัสถูกชี้ไปในทิศทางตรงกันข้ามกับการโก่งตัวของลูกตุ้ม
ถ้าเขียนแทนด้วย xการกระจัดเชิงเส้นของลูกตุ้มจากตำแหน่งสมดุลตามแนวโค้งของวงกลมรัศมี lจากนั้นการกระจัดเชิงมุมจะเท่ากับ φ = x / l. กฎข้อที่สองของนิวตัน ซึ่งเขียนขึ้นสำหรับการฉายภาพเวกเตอร์ความเร่งและแรงในทิศทางของเส้นสัมผัส ให้:
ความสัมพันธ์นี้แสดงว่าลูกตุ้มคณิตศาสตร์เป็นเชิงซ้อน ไม่เชิงเส้นระบบ เนื่องจากแรงที่ผลักให้ลูกตุ้มกลับคืนสู่ตำแหน่งสมดุลนั้นเป็นสัดส่วนกับการไม่กระจัดกระจาย x, แ
เฉพาะกรณี ความผันผวนเล็กน้อยเมื่อปิดสามารถแทนที่ด้วยลูกตุ้มทางคณิตศาสตร์เป็นฮาร์มอนิกออสซิลเลเตอร์นั่นคือระบบที่สามารถทำการสั่นของฮาร์มอนิกได้ ในทางปฏิบัติ การประมาณนี้ใช้ได้สำหรับมุมของลำดับ 15-20° ในขณะที่มูลค่าแตกต่างจากไม่เกิน 2% การแกว่งของลูกตุ้มที่แอมพลิจูดมากไม่ฮาร์โมนิก
สำหรับการแกว่งเล็กน้อยของลูกตุ้มคณิตศาสตร์ กฎข้อที่สองของนิวตันเขียนเป็น
สูตรนี้แสดงออกถึง ความถี่ธรรมชาติของการแกว่งเล็กน้อยของลูกตุ้มคณิตศาสตร์ .
เพราะเหตุนี้,
|

วัตถุใดๆ ที่ติดตั้งบนแกนหมุนในแนวนอนสามารถทำการแกว่งอิสระในสนามโน้มถ่วงได้ ดังนั้นจึงเป็นลูกตุ้มด้วย ลูกตุ้มดังกล่าวเรียกว่า ทางกายภาพ (รูปที่ 2.3.2). มันแตกต่างจากคณิตศาสตร์เพียงอย่างเดียวในการแจกแจงมวล ในตำแหน่งสมดุลที่มั่นคง จุดศูนย์กลางมวล ค ลูกตุ้มกายภาพอยู่ต่ำกว่าแกนหมุน O บนแนวตั้งที่ผ่านแกน เมื่อลูกตุ้มเบี่ยงเบนโดยมุม φ โมเมนต์ของแรงโน้มถ่วงจะเกิดขึ้น ซึ่งจะทำให้ลูกตุ้มกลับสู่ตำแหน่งสมดุล:
และกฎข้อที่สองของนิวตันสำหรับลูกตุ้มกายภาพจะกลายเป็น (ดู§1.23)
ที่นี่ ω 0 - ความถี่ธรรมชาติของการแกว่งเล็กน้อยของลูกตุ้มกายภาพ .
เพราะเหตุนี้,
ดังนั้น สมการที่แสดงกฎข้อที่สองของนิวตันสำหรับลูกตุ้มกายภาพสามารถเขียนได้เป็น
สุดท้าย สำหรับความถี่วงกลม ω 0 ของการแกว่งอิสระของลูกตุ้มกายภาพ จะได้นิพจน์ต่อไปนี้:
|

การแปลงพลังงานระหว่างการสั่นสะเทือนทางกลฟรี
เมื่อว่าง การสั่นสะเทือนทางกลพลังงานจลน์และพลังงานศักย์เปลี่ยนแปลงเป็นระยะ ที่ส่วนเบี่ยงเบนสูงสุดของร่างกายจากตำแหน่งสมดุล ความเร็ว และพลังงานจลน์จะหายไป ในตำแหน่งนี้พลังงานศักย์ของร่างกายสั่นไปถึง มูลค่าสูงสุด. สำหรับการโหลดสปริง พลังงานศักย์คือพลังงานของการเสียรูปยืดหยุ่นของสปริง สำหรับลูกตุ้มคณิตศาสตร์ นี่คือพลังงานในสนามโน้มถ่วงของโลก
เมื่อร่างกายเคลื่อนที่ผ่านตำแหน่งสมดุล ความเร็วสูงสุดของวัตถุ ร่างกายข้ามตำแหน่งสมดุลตามกฎของความเฉื่อย ขณะนี้มีพลังงานจลน์สูงสุดและพลังงานศักย์ต่ำสุด การเพิ่มขึ้นของพลังงานจลน์เกิดขึ้นเนื่องจากพลังงานศักย์ลดลง เมื่อเคลื่อนที่ต่อไป พลังงานศักย์จะเริ่มเพิ่มขึ้นเนื่องจากพลังงานจลน์ลดลง ฯลฯ
ดังนั้น ในระหว่างการสั่นของฮาร์มอนิก จะเกิดการเปลี่ยนแปลงเป็นระยะๆ ของพลังงานจลน์เป็นพลังงานศักย์และในทางกลับกันก็เกิดขึ้น
หากไม่มีแรงเสียดทานในระบบออสซิลเลเตอร์ พลังงานกลทั้งหมดระหว่างการสั่นสะเทือนอิสระจะยังคงไม่เปลี่ยนแปลง
สำหรับสปริงโหลด(ดู§2.2):
ในสภาพจริง ระบบออสซิลเลเตอร์ใดๆ ก็ตามอยู่ภายใต้อิทธิพลของแรงเสียดทาน (ความต้านทาน) ในกรณีนี้พลังงานกลส่วนหนึ่งจะถูกแปลงเป็น กำลังภายใน การเคลื่อนที่ด้วยความร้อนอะตอมและโมเลกุล และการสั่นสะเทือนกลายเป็น จางลง (รูปที่ 2.4.2).
อัตราการหน่วงของการแกว่งขึ้นอยู่กับขนาดของแรงเสียดทาน ช่วงเวลา τ ในระหว่างที่แอมพลิจูดการสั่นลดลงใน อี≈ 2.7 ครั้ง เรียกว่า เวลาสลาย .
ความถี่ของการแกว่งอิสระขึ้นอยู่กับอัตราการหน่วงของการแกว่ง เมื่อแรงเสียดทานเพิ่มขึ้น ความถี่ธรรมชาติจะลดลง อย่างไรก็ตาม การเปลี่ยนแปลงของความถี่ธรรมชาติจะสังเกตเห็นได้เฉพาะที่แรงเสียดทานขนาดใหญ่เพียงพอเท่านั้น เมื่อการสั่นตามธรรมชาติสลายตัวอย่างรวดเร็ว
ลักษณะสำคัญของระบบออสซิลเลเตอร์ที่ทำให้อิสระ การสั่นสะเทือนที่ชื้น, เป็น ปัจจัยด้านคุณภาพ Q. พารามิเตอร์นี้ถูกกำหนดเป็นตัวเลข นู๋การแกว่งรวมที่เกิดขึ้นโดยระบบในช่วงเวลาหน่วง τ คูณด้วย π:
ดังนั้น ปัจจัยด้านคุณภาพจึงกำหนดลักษณะการสูญเสียพลังงานสัมพัทธ์ของระบบออสซิลเลเตอร์เนื่องจากการมีอยู่ของแรงเสียดทานในช่วงเวลาหนึ่งเท่ากับหนึ่งช่วงการแกว่ง
แรงสั่นสะเทือนที่บังคับ เสียงก้อง. ตัวเองสั่น
การสั่นที่เกิดขึ้นภายใต้อิทธิพลของแรงคาบภายนอกเรียกว่า บังคับ.
แรงภายนอกทำงานในเชิงบวกและให้พลังงานไหลเข้าไปยังระบบออสซิลเลเตอร์ ไม่ยอมให้การสั่นจางลงแม้จะใช้แรงเสียดทานก็ตาม
แรงภายนอกเป็นระยะสามารถเปลี่ยนแปลงได้ตามเวลาตามกฎหมายต่างๆ สิ่งที่น่าสนใจเป็นพิเศษคือกรณีที่แรงภายนอกเปลี่ยนแปลงตามกฎฮาร์มอนิกที่มีความถี่ ω กระทำกับระบบออสซิลเลเตอร์ที่สามารถทำการแกว่งตามธรรมชาติที่ความถี่หนึ่ง ω 0 .
หากการแกว่งอิสระเกิดขึ้นที่ความถี่ ω 0 ซึ่งกำหนดโดยพารามิเตอร์ของระบบ การสั่นแบบบังคับคงที่จะเกิดขึ้นที่ ความถี่ ω ของแรงภายนอก.
หลังจากเริ่มผลกระทบของแรงภายนอกต่อระบบออสซิลเลเตอร์ ระยะหนึ่ง Δ tก่อตั้ง แรงสั่นสะเทือน. เวลาการตกตะกอนจะเท่ากันโดยลำดับความสำคัญของเวลาการสลายตัว τ ของการแกว่งอิสระในระบบออสซิลเลชัน
ในช่วงเริ่มต้น กระบวนการทั้งสองนั้นตื่นเต้นในระบบออสซิลเลชัน - การสั่นแบบบังคับที่ความถี่ ω และการแกว่งอิสระที่ความถี่ธรรมชาติ ω 0 . แต่การสั่นแบบอิสระถูกลดทอนลงเนื่องจากการมีอยู่ของแรงเสียดทานอย่างหลีกเลี่ยงไม่ได้ ดังนั้นหลังจากผ่านไประยะหนึ่ง เฉพาะการสั่นแบบคงที่ที่ความถี่ ω ของแรงขับเคลื่อนภายนอกเท่านั้นที่ยังคงอยู่ในระบบออสซิลเลชัน
ยกตัวอย่าง การสั่นสะเทือนแบบบังคับของร่างกายบนสปริง (รูปที่ 2.5.1) แรงภายนอกถูกนำไปใช้กับปลายอิสระของสปริง มันบังคับให้ปลายสปริงอิสระ (ซ้ายในรูป 2.5.1) เคลื่อนที่ตามกฎหมาย
หากปลายด้านซ้ายของสปริงเลื่อนออกไปตามระยะทาง y, และอันที่ถูกต้อง - ในระยะไกล xจากตำแหน่งเดิม เมื่อสปริงไม่ได้เสียรูป แล้วการยืดตัวของสปริง Δ lเท่ากับ:
ในสมการนี้ แรงที่กระทำต่อร่างกายจะแสดงเป็นสองพจน์ เทอมแรกทางด้านขวาคือแรงยืดหยุ่นที่ส่งกลับร่างกายไปยังตำแหน่งสมดุล ( x= 0). ระยะที่สองคือผลกระทบภายนอกเป็นระยะต่อร่างกาย คำนี้เรียกว่า แรงดึงดูด.
สมการแสดงกฎข้อที่สองของนิวตันสำหรับวัตถุในสปริงเมื่อมีการกระทำเป็นระยะภายนอกสามารถกำหนดได้อย่างเคร่งครัด รูปแบบทางคณิตศาสตร์หากเราคำนึงถึงความสัมพันธ์ระหว่างการเร่งความเร็วของร่างกายและพิกัดของมัน: แล้ว จะเขียนในรูปแบบ
สมการ (**) ไม่ได้คำนึงถึงการกระทำของแรงเสียดทาน ไม่เหมือน สมการการสั่นอิสระ(*) (ดู§2.2) สมการแรงสั่นสะเทือน(**) มีสองความถี่ - ความถี่ ω 0 ของการแกว่งอิสระและความถี่ ω ของแรงขับเคลื่อน
แรงสั่นสะเทือนคงที่ของโหลดบนสปริงเกิดขึ้นที่ความถี่ อิทธิพลภายนอกในกฎหมาย
|
แอมพลิจูดของการสั่นสะเทือนแบบบังคับ x m และเฟสเริ่มต้น θ ขึ้นอยู่กับอัตราส่วนของความถี่ ω 0 และ ω และตามแอมพลิจูด yเมตร แรงภายนอก
ที่ความถี่ต่ำมาก เมื่อ ω<< ω 0 , движение тела массой มติดกับปลายด้านขวาของสปริง ทำซ้ำการเคลื่อนไหวของปลายด้านซ้ายของสปริง โดยที่ x(t) = y(t) และสปริงยังคงไม่เปลี่ยนรูปในทางปฏิบัติ แรงภายนอกที่ใช้กับปลายด้านซ้ายของสปริงไม่ทำงาน เนื่องจากโมดูลัสของแรงนี้ที่ ω<< ω 0 стремится к нулю.
หากความถี่ ω ของแรงภายนอกเข้าใกล้ความถี่ธรรมชาติ ω 0 แอมพลิจูดของการสั่นแบบบังคับจะเพิ่มขึ้นอย่างมาก ปรากฏการณ์นี้เรียกว่า เสียงก้อง . การพึ่งพาแอมพลิจูด x m การแกว่งบังคับจากความถี่ ω ของแรงขับเรียกว่า ลักษณะจังหวะหรือ เส้นโค้งเรโซแนนซ์(รูปที่ 2.5.2).
ที่เสียงสะท้อน แอมพลิจูด xความผันผวนของโหลด m อาจมากกว่าแอมพลิจูดหลายเท่า yการสั่นของสปริงอิสระ (ซ้าย) ที่เกิดจากการกระทำภายนอก ในกรณีที่ไม่มีแรงเสียดทาน แอมพลิจูดของการสั่นแบบบังคับที่เรโซแนนซ์ควรเพิ่มขึ้นอย่างไม่มีกำหนด ในสภาพจริง แอมพลิจูดของการสั่นแบบบังคับในสภาวะคงที่ถูกกำหนดโดยเงื่อนไข: การทำงานของแรงภายนอกในช่วงระยะเวลาของการแกว่งจะต้องเท่ากับการสูญเสียพลังงานกลในเวลาเดียวกันเนื่องจากแรงเสียดทาน ยิ่งแรงเสียดทานน้อย (เช่น ยิ่งปัจจัยคุณภาพสูงขึ้น Qระบบออสซิลเลเตอร์) ยิ่งแอมพลิจูดของการสั่นแบบบังคับที่เรโซแนนซ์มากขึ้น
สำหรับระบบออสซิลเลเตอร์ที่มีปัจจัยคุณภาพไม่สูงมาก (< 10) резонансная частота несколько смещается в сторону низких частот. Это хорошо заметно на рис. 2.5.2.
ปรากฏการณ์ของการสั่นพ้องสามารถทำให้เกิดการทำลายสะพาน อาคาร และโครงสร้างอื่น ๆ หากความถี่ตามธรรมชาติของการแกว่งของมันตรงกับความถี่ของแรงกระทำเป็นระยะ ๆ ซึ่งเกิดขึ้นเช่นเนื่องจากการหมุนของมอเตอร์ที่ไม่สมดุล
แรงสั่นสะเทือนคือ ไม่ติดขัดความผันผวน การสูญเสียพลังงานอย่างหลีกเลี่ยงไม่ได้อันเนื่องมาจากแรงเสียดทานจะได้รับการชดเชยด้วยการจ่ายพลังงานจากแหล่งภายนอกของแรงกระทำเป็นระยะ มีหลายระบบที่การสั่นแบบ undamped ไม่ได้เกิดขึ้นเนื่องจากอิทธิพลภายนอกเป็นระยะ แต่เป็นผลมาจากความสามารถของระบบดังกล่าวในการควบคุมการไหลของพลังงานจากแหล่งคงที่ ระบบดังกล่าวเรียกว่า สั่นตัวเอง, และกระบวนการของการสั่นแบบไม่แดมป์ในระบบดังกล่าว - การสั่นไหวในตัวเอง . ในระบบออสซิลเลเตอร์ในตัวเอง องค์ประกอบลักษณะเฉพาะสามอย่างสามารถแยกแยะได้ - ระบบออสซิลเลเตอร์ แหล่งพลังงาน และอุปกรณ์ป้อนกลับระหว่างระบบออสซิลเลเตอร์กับแหล่งกำเนิด ในฐานะระบบออสซิลเลเตอร์ สามารถใช้ระบบกลไกใดๆ ที่สามารถทำการสั่นสะเทือนแบบแดมเปอร์ของตัวเองได้ (เช่น ลูกตุ้มนาฬิกาแขวน)
แหล่งพลังงานอาจเป็นพลังงานการเปลี่ยนรูปของสปริงหรือพลังงานศักย์ของโหลดในสนามโน้มถ่วง อุปกรณ์ป้อนกลับเป็นกลไกที่ระบบการสั่นในตัวเองควบคุมการไหลของพลังงานจากแหล่งกำเนิด ในรูป 2.5.3 แสดงไดอะแกรมของการทำงานร่วมกันขององค์ประกอบต่าง ๆ ของระบบการสั่นในตัวเอง
ตัวอย่างของระบบสั่นตัวเองทางกลคือเครื่องจักรกับ สมอย้าย (รูปที่ 2.5.4) ล้อวิ่งที่มีฟันเฉียงถูกยึดอย่างแน่นหนากับดรัมฟันซึ่งจะมีการโยนโซ่ที่มีน้ำหนัก ติดกับปลายด้านบนของลูกตุ้ม สมอ(สมอ) ด้วยวัสดุแข็งสองแผ่นโค้งไปตามส่วนโค้งของวงกลมโดยมีจุดศูนย์กลางอยู่ที่แกนของลูกตุ้ม ในนาฬิกาข้อมือ น้ำหนักจะถูกแทนที่ด้วยสปริง และลูกตุ้มจะถูกแทนที่ด้วยบาลานเซอร์ - วงล้อจักรที่ติดกับสปริงเกลียว บาลานเซอร์ทำการสั่นสะเทือนแบบบิดรอบแกนของมัน ระบบออสซิลเลเตอร์ในนาฬิกาเป็นลูกตุ้มหรือบาลานเซอร์
แหล่งที่มาของพลังงานคือการยกน้ำหนักหรือสปริงแผล อุปกรณ์ป้อนกลับเป็นพุกที่ช่วยให้ล้อวิ่งหมุนฟันหนึ่งซี่ในครึ่งรอบ ข้อเสนอแนะมาจากการทำงานร่วมกันของสมอกับวงล้อวิ่ง ด้วยการสั่นของลูกตุ้มแต่ละครั้ง ฟันของล้อเลื่อนจะดันส้อมสมอไปในทิศทางของการเคลื่อนที่ของลูกตุ้ม โดยส่งพลังงานส่วนหนึ่งไปยังมัน ซึ่งจะชดเชยการสูญเสียพลังงานอันเนื่องมาจากแรงเสียดทาน ดังนั้นพลังงานศักย์ของน้ำหนัก (หรือสปริงบิด) จะถูกถ่ายโอนไปยังลูกตุ้มทีละส่วนทีละส่วน
ระบบการสั่นด้วยตนเองของกลไกนั้นแพร่หลายในชีวิตรอบตัวเราและในเทคโนโลยี การสั่นในตัวเองดำเนินการโดยเครื่องยนต์ไอน้ำ, เครื่องยนต์สันดาปภายใน, กระดิ่งไฟฟ้า, เครื่องสายเครื่องดนตรีที่โค้งคำนับ, เสาลมในท่อของเครื่องลม, สายเสียงเมื่อพูดหรือร้องเพลง ฯลฯ
 |
| รูปที่ 2.5.4. กลไกนาฬิกาพร้อมลูกตุ้ม |
เมื่อเกิดการแกว่งตัวที่โรงเรียน ตัวอย่างที่ง่ายที่สุดสองตัวอย่างแสดงให้เห็นภาพเหล่านี้: น้ำหนักบนสปริงและลูกตุ้มทางคณิตศาสตร์ (นั่นคือ น้ำหนักจุดบนเส้นด้ายที่ขยายไม่ได้) ในสนามแรงโน้มถ่วง ในทั้งสองกรณี จะสังเกตเห็นความสม่ำเสมอที่สำคัญในการแกว่ง: ระยะเวลาไม่ขึ้นอยู่กับแอมพลิจูด - อย่างน้อยตราบเท่าที่แอมพลิจูดนี้ยังคงน้อย - แต่ถูกกำหนดโดยคุณสมบัติทางกลของระบบเท่านั้น
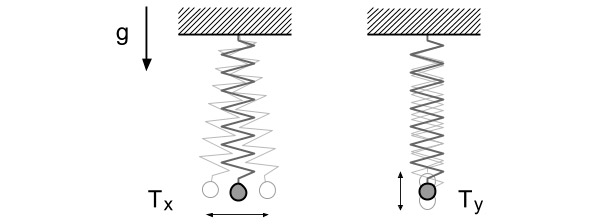
ตอนนี้ เรามารวมสองตัวอย่างนี้และพิจารณาการสั่นสะเทือนของน้ำหนักที่แขวนอยู่บนสปริงแรงดึงในสนามโน้มถ่วง (รูปที่ 1)
เพื่อความง่าย เราละเลยมิติที่สามและถือว่าลูกตุ้มสปริงแกว่งไปแกว่งมาในระนาบของร่างอย่างเคร่งครัด ในกรณีนี้ น้ำหนัก (ซึ่งถือเป็นน้ำหนักจุดด้วย) สามารถเคลื่อนที่ในระนาบแนวตั้งในทิศทางใดก็ได้ ไม่ใช่แค่ขึ้นและลง หรือซ้ายและขวา ดังแสดงในรูปที่ 2. แต่ถ้าอีกครั้งเราจำกัดตัวเองให้เบี่ยงเบนจากตำแหน่งสมดุลเพียงเล็กน้อยเท่านั้น การแกว่งในแนวนอนและแนวตั้งก็เกิดขึ้นเกือบจะเป็นอิสระด้วยคาบของมันเอง ที xและ T y.
ดูเหมือนว่าเนื่องจากการสั่นเหล่านี้ถูกกำหนดโดยแรงและลักษณะของระบบที่แตกต่างกันโดยสิ้นเชิง ดังนั้นช่วงเวลาของพวกมันจึงเป็นไปตามอำเภอใจโดยสมบูรณ์ ไม่มีทางเชื่อมโยงถึงกัน ปรากฎว่า - ไม่!
งาน
พิสูจน์สำหรับลูกตุ้มดังกล่าว ระยะเวลาของการแกว่งในแนวนอนจะมากกว่าระยะเวลาของการแกว่งในแนวตั้งเสมอ: T x > T y.
เบาะแส
ในตอนแรก ปัญหาอาจทำให้คุณประหลาดใจที่ดูเหมือนว่าไม่มีอะไรให้ในนั้น แต่บางสิ่งจำเป็นต้องได้รับการพิสูจน์ แต่ไม่มีอะไรผิดปกติที่นี่ เมื่อปัญหามีการกำหนดในลักษณะนี้ หมายความว่าคุณสามารถแนะนำสัญกรณ์ที่คุณต้องการ คำนวณกับพวกเขาว่าต้องการอะไร จากนั้นจึงสรุปได้ว่า ไม่ได้ขึ้นอยู่กับจากค่านิยมเหล่านี้ ทำเพื่องานนี้ นำสูตรสำหรับช่วงเวลาการแกว่งตัว คิดเกี่ยวกับปริมาณที่เกี่ยวข้อง และเปรียบเทียบทั้งสองช่วงเวลาด้วยการหารด้วยกันและกัน
วิธีการแก้
คาบการสั่นของมวลน้ำหนัก มบนสปริงที่แข็งทื่อ kและความยาว หลี่ 0 คือ
 .
.
สูตรนี้ไม่เปลี่ยนแปลงแม้น้ำหนักจะลอยอยู่ในสนามโน้มถ่วงด้วยความเร่งการตกอย่างอิสระ ก. แน่นอนว่าตำแหน่งสมดุลของน้ำหนักจะเลื่อนลงมาเป็นความสูง Δ L = มก./k- ด้วยการยืดตัวของสปริงที่แรงยืดหยุ่นจะชดเชยแรงโน้มถ่วง แต่ระยะเวลาของการแกว่งในแนวตั้งเกี่ยวกับตำแหน่งสมดุลใหม่นี้กับสปริงที่ยืดออกจะยังคงเหมือนเดิม
คาบของการสั่นในแนวนอนของลูกตุ้มที่ยืดออกจะแสดงในรูปของความเร่งโน้มถ่วง กและของเขา เสร็จสิ้นความยาว L = L 0 +Δ หลี่:
 .
.
ต้องขอบคุณการยืดตัวเพิ่มเติมในสนามโน้มถ่วงที่เราพบว่า

นั่นคือทางออกทั้งหมด
Afterword

แม้จะดูเรียบง่าย แต่ลูกตุ้มบนสปริงเป็นระบบที่ค่อนข้างสมบูรณ์ในปรากฏการณ์ นี่เป็นหนึ่งในตัวอย่างที่ง่ายที่สุดของปรากฏการณ์ที่น่ารัก - เสียงสะท้อนของ Fermi ประกอบด้วยในนี้ โดยทั่วไปแล้ว หากน้ำหนักถูกดึงและปล่อยออก มันก็จะแกว่งไปมาทั้งในแนวตั้งและแนวนอน การแกว่งทั้งสองประเภทนี้จะทับซ้อนกันและไม่รบกวนซึ่งกันและกัน แต่ถ้าคาบของการแกว่งในแนวตั้งและแนวนอนสัมพันธ์กันโดยความสัมพันธ์ ที x = 2T yจากนั้นการแกว่งในแนวนอนและแนวตั้งราวกับว่าขัดต่อเจตจำนงจะค่อยๆเปลี่ยนไปเหมือนในแอนิเมชั่นทางด้านขวา พลังงานของการสั่นสะเทือนจะถูกสูบจากการสั่นสะเทือนในแนวตั้งไปสู่การสั่นสะเทือนในแนวนอนและในทางกลับกัน
ดูเหมือนว่านี้: คุณดึงน้ำหนักลงแล้วปล่อย ในตอนแรก มันจะแกว่งขึ้นและลงเท่านั้น จากนั้นก็เริ่มแกว่งไปด้านข้างด้วยตัวมันเอง ชั่วขณะหนึ่งการสั่นจะกลายเป็นแนวนอนเกือบทั้งหมด แล้วจึงกลับสู่แนวตั้งอีกครั้ง น่าแปลกที่การแกว่งในแนวตั้งอย่างเคร่งครัดกลับกลายเป็นว่าไม่เสถียร
คำอธิบายของเอฟเฟกต์ที่น่าทึ่งนี้ รวมถึงอัตราส่วนเวทย์มนตร์ ที x:T y= 2:1 นั่นแหละ แสดงโดย xและ yความเบี่ยงเบนของน้ำหนักจากตำแหน่งสมดุล (axis yชี้ขึ้นไป) ด้วยค่าเบี่ยงเบนดังกล่าว พลังงานศักย์จะเพิ่มขึ้นตามปริมาณ
นี่เป็นสูตรที่แน่นอน เหมาะสำหรับการเบี่ยงเบนใด ๆ ทั้งใหญ่และเล็ก แต่ถ้า xและ yเล็ก น้อย หลี่จากนั้นนิพจน์จะเท่ากับ .โดยประมาณ
บวกกับคำอื่นๆ ที่มีระดับความเบี่ยงเบนที่สูงกว่า ปริมาณ คุณยูและ ยู xเป็นพลังงานศักย์ธรรมดาที่ได้จากการแกว่งในแนวตั้งและแนวนอน และนี่คือค่าที่เน้นเป็นสีน้ำเงิน Uxyเป็นสารเติมแต่งพิเศษที่สร้าง ปฏิสัมพันธ์ระหว่างการสั่นสะเทือนเหล่านี้ เนื่องจากการโต้ตอบเพียงเล็กน้อยนี้ การสั่นในแนวตั้งจึงส่งผลต่อการสั่นในแนวนอนและในทางกลับกัน สิ่งนี้จะโปร่งใสมากหากเราทำการคำนวณเพิ่มเติมและเขียนสมการสำหรับการแกว่งในแนวนอนและแนวตั้ง:

ที่สัญกรณ์
หากปราศจากการเติมสีน้ำเงิน เราก็จะมีการแกว่งอิสระตามปกติในแนวตั้งและแนวนอนด้วยความถี่ ωyและ ω x. สารเติมแต่งนี้มีบทบาท แรงผลักดัน, ปั๊มสั่นสะเทือนเพิ่มเติม ถ้าความถี่ ωyและ ω xเป็นไปตามอำเภอใจ แรงเล็กๆ น้อยๆ นี้ไม่ก่อให้เกิดผลกระทบอย่างมีนัยสำคัญ แต่ถ้าความสัมพันธ์ ωy = 2ω x, กำทอนกำหนดใน: แรงผลักดันสำหรับการแกว่งทั้งสองประเภทมีส่วนประกอบ ด้วยความถี่เดียวกับตัวสั่นเอง. เป็นผลให้แรงนี้สร้างการแกว่งประเภทหนึ่งอย่างช้า ๆ แต่มั่นคงและระงับอีกประเภทหนึ่ง นี่คือวิธีที่การสั่นสะเทือนในแนวนอนและแนวตั้งไหลเข้าหากัน

ความงามเพิ่มเติมจะเกิดขึ้นหากในตัวอย่างนี้พิจารณาถึงมิติที่สามอย่างตรงไปตรงมา เราคิดว่าน้ำหนักสามารถกด-คลายสปริงในแนวตั้งและแกว่งเหมือนลูกตุ้มในแนวนอนสองทิศทาง จากนั้น เมื่อตรงตามเงื่อนไขการสั่นพ้อง เมื่อมองจากด้านบน น้ำหนักจะเขียนเส้นทางของดาวฤกษ์ ตัวอย่างเช่น ในรูปที่ 3. สิ่งนี้เกิดขึ้นเพราะระนาบของการสั่นไม่นิ่ง แต่หมุน - แต่ไม่ราบรื่น แต่ราวกับกระโดด ตราบใดที่การวอกแวกเคลื่อนจากด้านหนึ่งไปอีกด้านหนึ่ง ระนาบนี้จะยึดไว้ไม่มากก็น้อย และการเลี้ยวจะเกิดขึ้นในช่วงเวลาสั้นๆ นั้นเมื่อวอกแวกเกือบจะเป็นแนวตั้ง เราขอเชิญชวนผู้อ่านให้คิดเอาเองว่าสาเหตุของพฤติกรรมนี้คืออะไรและอะไรเป็นตัวกำหนดมุมการหมุนของระนาบ และผู้ที่ต้องการกระโจนเข้าสู่งานที่ค่อนข้างลึกล้ำนี้สามารถดูบทความ Stepwise Precession of the Resonant Swinging Spring ซึ่งไม่เพียงแต่ให้การวิเคราะห์โดยละเอียดของปัญหาเท่านั้น แต่ยังพูดถึงประวัติและการเชื่อมโยงของปัญหานี้กับผู้อื่น วิชาฟิสิกส์โดยเฉพาะฟิสิกส์ปรมาณู
 คำปราศรัยเป็นต้นแบบของวารสารศาสตร์
คำปราศรัยเป็นต้นแบบของวารสารศาสตร์ คำคมเกี่ยวกับนโปเลียน - dslinkov — LiveJournal
คำคมเกี่ยวกับนโปเลียน - dslinkov — LiveJournal ฉันแก้แค้น คนบนรถปราบดินทำลายเมือง
ฉันแก้แค้น คนบนรถปราบดินทำลายเมือง