Kedudukan keseimbangan bandul spring. Ayunan bandul spring
Pendulum spring ialah titik jisim material, dilekatkan pada spring tanpa berat yang benar-benar kenyal dengan kekakuan.  . Terdapat dua kes paling mudah: mendatar (Rajah 15, a) dan menegak (Rajah 15, b) bandul.
. Terdapat dua kes paling mudah: mendatar (Rajah 15, a) dan menegak (Rajah 15, b) bandul.
a)
Bandul mendatar(Gamb. 15a). Apabila mengalihkan kargo  daripada keseimbangan
daripada keseimbangan  mengikut jumlah
mengikut jumlah  bertindak ke atasnya dalam arah mendatar. kembali daya kenyal
bertindak ke atasnya dalam arah mendatar. kembali daya kenyal
 (undang-undang Hooke).
(undang-undang Hooke).
Adalah diandaikan bahawa sokongan mendatar di mana beban slaid  semasa getarannya, ia benar-benar licin (tiada geseran).
semasa getarannya, ia benar-benar licin (tiada geseran).
b) bandul menegak(rajah 15, b). Kedudukan keseimbangan dalam kes ini dicirikan oleh keadaan:

di mana  - magnitud daya kenyal yang bertindak ke atas beban
- magnitud daya kenyal yang bertindak ke atas beban  apabila spring diregangkan secara statik
apabila spring diregangkan secara statik  di bawah pengaruh graviti
di bawah pengaruh graviti  .
.
|
a |
|


Rajah 15. Bandul musim bunga: a- mendatar dan b– menegak
Jika spring diregangkan dan beban dilepaskan, ia akan mula berayun secara menegak. Jika offset pada satu ketika adalah  ,
maka daya kenyal kini akan ditulis sebagai
,
maka daya kenyal kini akan ditulis sebagai  .
.
Dalam kedua-dua kes yang dipertimbangkan, pendulum spring melakukan ayunan harmonik dengan tempoh
 (27)
(27)
dan kekerapan kitaran
 .
(28)
.
(28)
Pada contoh pertimbangan bandul spring kita boleh menyimpulkan bahawa ayunan harmonik adalah gerakan yang disebabkan oleh daya yang meningkat mengikut perkadaran dengan anjakan  . Dengan cara ini, jika daya pemulih kelihatan seperti hukum Hooke
. Dengan cara ini, jika daya pemulih kelihatan seperti hukum Hooke
 (dia mendapat nama itudaya separa anjal
), maka sistem mesti melakukan ayunan harmonik. Pada saat melepasi kedudukan keseimbangan, daya pemulihan tidak bertindak ke atas jasad, walau bagaimanapun, jasad melangkau kedudukan keseimbangan dengan inersia dan daya pemulihan menukar arah ke arah yang bertentangan.
(dia mendapat nama itudaya separa anjal
), maka sistem mesti melakukan ayunan harmonik. Pada saat melepasi kedudukan keseimbangan, daya pemulihan tidak bertindak ke atas jasad, walau bagaimanapun, jasad melangkau kedudukan keseimbangan dengan inersia dan daya pemulihan menukar arah ke arah yang bertentangan.
Bandul matematik
Rajah.16. Bandul matematik
 , yang melakukan ayunan kecil di bawah tindakan graviti (Rajah 16).
, yang melakukan ayunan kecil di bawah tindakan graviti (Rajah 16).
Ayunan bandul sedemikian pada sudut pesongan kecil  (tidak melebihi 5º) boleh dianggap harmonik, dan kekerapan kitaran bandul matematik:
(tidak melebihi 5º) boleh dianggap harmonik, dan kekerapan kitaran bandul matematik:
 ,
(29)
,
(29)
dan tempoh:
 .
(30)
.
(30)
2.3. Tenaga badan semasa getaran harmonik
Tenaga yang diberikan kepada sistem berayun semasa tolakan awal akan diubah secara berkala: tenaga potensi spring yang cacat akan ditukar kepada tenaga kinetik beban bergerak dan sebaliknya.
Biarkan pendulum spring melakukan ayunan harmonik dengan fasa awal  , iaitu
, iaitu  (rajah 17).
(rajah 17).

Rajah.17. undang-undang pemuliharaan tenaga mekanikal
apabila bandul spring berayun
Pada sisihan maksimum beban dari kedudukan keseimbangan, jumlah tenaga mekanikal bandul (tenaga spring cacat dengan kekakuan  ) adalah sama dengan
) adalah sama dengan  . Apabila melalui kedudukan keseimbangan (
. Apabila melalui kedudukan keseimbangan (  )
tenaga keupayaan spring akan menjadi sama dengan sifar, dan jumlah tenaga mekanikal sistem ayunan akan ditentukan sebagai
)
tenaga keupayaan spring akan menjadi sama dengan sifar, dan jumlah tenaga mekanikal sistem ayunan akan ditentukan sebagai  .
.
Rajah 18 menunjukkan pergantungan kinetik, potensi dan jumlah tenaga dalam kes di mana ayunan harmonik diterangkan oleh fungsi trigonometri sinus (garis putus-putus) atau kosinus (garis pepejal).

Rajah 18. Graf pergantungan masa kinetik
dan tenaga berpotensi untuk ayunan harmonik
Daripada graf (Rajah 18) ia menunjukkan bahawa kekerapan perubahan dalam tenaga kinetik dan potensi adalah dua kali lebih tinggi daripada frekuensi semula jadi ayunan harmonik.
Pergerakan berayun ialah sebarang pergerakan yang berulang secara berkala. Oleh itu, pergantungan koordinat dan halaju badan pada masa semasa ayunan diterangkan oleh fungsi masa berkala. AT kursus sekolah ahli fizik menganggap ayunan sedemikian di mana kebergantungan dan halaju badan adalah fungsi trigonometri. ![]() ,
, ![]() atau gabungan mereka, di mana ada beberapa nombor. Ayunan sedemikian dipanggil harmonik (fungsi
atau gabungan mereka, di mana ada beberapa nombor. Ayunan sedemikian dipanggil harmonik (fungsi ![]() dan
dan ![]() sering dipanggil fungsi harmonik). Untuk menyelesaikan masalah untuk getaran termasuk dalam program bersatu peperiksaan negeri dalam fizik, anda perlu mengetahui definisi ciri-ciri utama gerakan berayun: amplitud, tempoh, kekerapan, bulatan (atau kitaran) kekerapan dan fasa ayunan. Marilah kita berikan takrifan ini dan sambungkan kuantiti terhitung dengan parameter pergantungan koordinat badan pada masa, yang dalam kes ayunan harmonik sentiasa boleh diwakili sebagai
sering dipanggil fungsi harmonik). Untuk menyelesaikan masalah untuk getaran termasuk dalam program bersatu peperiksaan negeri dalam fizik, anda perlu mengetahui definisi ciri-ciri utama gerakan berayun: amplitud, tempoh, kekerapan, bulatan (atau kitaran) kekerapan dan fasa ayunan. Marilah kita berikan takrifan ini dan sambungkan kuantiti terhitung dengan parameter pergantungan koordinat badan pada masa, yang dalam kes ayunan harmonik sentiasa boleh diwakili sebagai
di mana , dan ialah beberapa nombor.
Amplitud ayunan ialah sisihan maksimum jasad berayun daripada kedudukan keseimbangan. Oleh kerana nilai maksimum dan minimum kosinus dalam (11.1) adalah sama dengan ±1, maka amplitud ayunan badan yang berayun (11.1) adalah sama dengan . Tempoh ayunan ialah masa minimum selepas pergerakan badan diulang. Untuk pergantungan (11.1), tempoh boleh ditetapkan daripada pertimbangan berikut. kosinus - fungsi berkala dengan tempoh. Oleh itu, pergerakan diulang sepenuhnya melalui nilai sedemikian yang . Dari sini kita dapat
Kekerapan ayunan bulat (atau kitaran) ialah bilangan ayunan per unit masa. Daripada formula (11.3) kita membuat kesimpulan bahawa kekerapan bulatan ialah nilai daripada formula (11.1).
Fasa ayunan ialah hujah bagi fungsi trigonometri yang menerangkan pergantungan koordinat pada masa. Daripada formula (11.1) kita melihat bahawa fasa ayunan badan, pergerakan yang diterangkan oleh pergantungan (11.1), adalah sama dengan  . Nilai fasa ayunan pada masa = 0 dipanggil fasa awal. Untuk pergantungan (11.1) fasa awal ayunan adalah sama dengan nilai . Jelas sekali, fasa awal ayunan bergantung pada pilihan titik rujukan masa (momen = 0), yang sentiasa bersyarat. Dengan menukar asal rujukan masa, fasa awal ayunan sentiasa boleh "dibuat" sama dengan sifar, dan sinus dalam formula (11.1) "ditukar" menjadi kosinus atau sebaliknya.
. Nilai fasa ayunan pada masa = 0 dipanggil fasa awal. Untuk pergantungan (11.1) fasa awal ayunan adalah sama dengan nilai . Jelas sekali, fasa awal ayunan bergantung pada pilihan titik rujukan masa (momen = 0), yang sentiasa bersyarat. Dengan menukar asal rujukan masa, fasa awal ayunan sentiasa boleh "dibuat" sama dengan sifar, dan sinus dalam formula (11.1) "ditukar" menjadi kosinus atau sebaliknya.
 Program peperiksaan negeri bersatu juga termasuk pengetahuan tentang formula untuk kekerapan ayunan spring dan bandul matematik. Adalah lazim untuk memanggil pendulum spring sebagai badan yang boleh berayun pada permukaan mendatar yang licin di bawah tindakan spring, hujung kedua yang ditetapkan (angka kiri). Bandul matematik ialah jasad yang besar, dimensinya boleh diabaikan, berayun pada benang yang panjang, tanpa berat dan tidak dapat dipanjangkan (angka kanan). Nama sistem ini - "pendulum matematik" adalah disebabkan oleh fakta bahawa ia adalah abstrak matematik model sebenar ( fizikal) daripada bandul. Ia adalah perlu untuk mengingati formula untuk tempoh (atau kekerapan) ayunan spring dan bandul matematik. Untuk bandul spring
Program peperiksaan negeri bersatu juga termasuk pengetahuan tentang formula untuk kekerapan ayunan spring dan bandul matematik. Adalah lazim untuk memanggil pendulum spring sebagai badan yang boleh berayun pada permukaan mendatar yang licin di bawah tindakan spring, hujung kedua yang ditetapkan (angka kiri). Bandul matematik ialah jasad yang besar, dimensinya boleh diabaikan, berayun pada benang yang panjang, tanpa berat dan tidak dapat dipanjangkan (angka kanan). Nama sistem ini - "pendulum matematik" adalah disebabkan oleh fakta bahawa ia adalah abstrak matematik model sebenar ( fizikal) daripada bandul. Ia adalah perlu untuk mengingati formula untuk tempoh (atau kekerapan) ayunan spring dan bandul matematik. Untuk bandul spring
di manakah panjang benang, ialah pecutan jatuh bebas. Pertimbangkan penggunaan definisi dan undang-undang ini pada contoh penyelesaian masalah.
Untuk mencari kekerapan kitaran beban dalam tugasan 11.1.1 mari kita cari tempoh ayunan dahulu, dan kemudian gunakan formula (11.2). Oleh kerana 10 m 28 s ialah 628 s, dan pada masa ini beban membuat 100 ayunan, tempoh ayunan beban ialah 6.28 s. Oleh itu, kekerapan ayunan kitaran ialah 1 s -1 (jawapan 2 ). AT tugasan 11.1.2 beban membuat 60 ayunan dalam 600 s, jadi kekerapan ayunan ialah 0.1 s -1 (jawapan 1 ).
Untuk memahami apa jalan itu akan berlalu kargo selama 2.5 tempoh ( tugasan 11.1.3), ikuti pergerakannya. Selepas satu tempoh, beban akan kembali semula ke titik pesongan maksimum, membuat ayunan lengkap. Oleh itu, pada masa ini, beban akan melepasi jarak, sama dengan empat amplitud: ke kedudukan keseimbangan - satu amplitud, dari kedudukan keseimbangan ke titik sisihan maksimum ke arah lain - kedua, kembali ke kedudukan keseimbangan - ketiga, dari kedudukan keseimbangan ke titik permulaan - yang keempat. Semasa tempoh kedua, beban akan sekali lagi melepasi empat amplitud, dan untuk separuh baki tempoh - dua amplitud. Oleh itu, jarak yang dilalui adalah sama dengan sepuluh amplitud (jawapan 4 ).
Jumlah pergerakan badan ialah jarak dari titik mula ke titik akhir. Untuk 2.5 tempoh dalam tugasan 11.1.4 badan akan mempunyai masa untuk menyelesaikan dua ayunan penuh dan separuh penuh, i.e. akan berada pada sisihan maksimum, tetapi pada sisi lain kedudukan keseimbangan. Oleh itu, jumlah anjakan adalah sama dengan dua amplitud (jawapan 3 ).
Secara takrif, fasa ayunan ialah hujah bagi fungsi trigonometri, yang menerangkan pergantungan koordinat jasad berayun pada masa. Oleh itu jawapan yang betul ialah tugasan 11.1.5 - 3 .
Tempoh ialah masa ayunan lengkap. Ini bermakna bahawa kembalinya badan kembali ke titik yang sama dari mana badan mula bergerak tidak bermakna bahawa tempoh telah berlalu: badan mesti kembali ke titik yang sama dengan kelajuan yang sama. Sebagai contoh, badan, setelah memulakan ayunan dari kedudukan keseimbangan, dalam tempoh itu akan mempunyai masa untuk menyimpang dengan nilai maksimum dalam satu arah, kembali, menyimpang ke maksimum ke arah lain dan kembali semula. Oleh itu, dalam tempoh tersebut, badan akan mempunyai masa untuk menyimpang dua kali dengan nilai maksimum dari kedudukan keseimbangan dan kembali semula. Oleh itu, laluan dari kedudukan keseimbangan ke titik sisihan maksimum ( tugasan 11.1.6) badan menghabiskan bahagian keempat tempoh (jawapan 3 ).
Ayunan sedemikian dipanggil harmonik, di mana pergantungan koordinat badan berayun pada masa diterangkan oleh fungsi trigonometri (sinus atau kosinus) masa. AT tugasan 11.1.7 ini adalah fungsi dan , walaupun pada hakikatnya parameter yang disertakan di dalamnya dilambangkan sebagai 2 dan 2 . Fungsi tersebut ialah fungsi trigonometri bagi kuasa dua masa. Oleh itu, turun naik hanya kuantiti dan harmonik (jawapan 4 ).
Dengan ayunan harmonik, kelajuan badan berubah mengikut undang-undang  , di manakah amplitud ayunan kelajuan (rujukan masa dipilih supaya fasa awal ayunan akan sama dengan sifar). Dari sini kita dapati pergantungan tenaga kinetik badan dari masa
, di manakah amplitud ayunan kelajuan (rujukan masa dipilih supaya fasa awal ayunan akan sama dengan sifar). Dari sini kita dapati pergantungan tenaga kinetik badan dari masa  (tugasan 11.1.8). Menggunakan yang terkenal formula trigonometri, kita mendapatkan
(tugasan 11.1.8). Menggunakan yang terkenal formula trigonometri, kita mendapatkan
Ia berikutan daripada formula ini bahawa tenaga kinetik badan berubah semasa ayunan harmonik juga mengikut hukum harmonik, tetapi dengan frekuensi dua kali ganda (jawapannya ialah 2 ).
Di belakang nisbah antara tenaga kinetik beban dan tenaga keupayaan spring ( tugasan 11.1.9) boleh dikesan dengan mudah daripada pertimbangan berikut. Apabila badan diselewengkan dengan jumlah maksimum dari kedudukan keseimbangan, kelajuan badan adalah sifar, dan, oleh itu, tenaga potensi spring adalah lebih besar daripada tenaga kinetik beban. Sebaliknya, apabila badan melepasi kedudukan keseimbangan, tenaga potensi spring adalah sifar, dan oleh itu tenaga kinetik lebih besar daripada tenaga keupayaan. Oleh itu, antara laluan kedudukan keseimbangan dan sisihan maksimum, tenaga kinetik dan potensi dibandingkan sekali. Dan kerana dalam tempoh itu badan melepasi empat kali dari kedudukan keseimbangan kepada sisihan maksimum atau sebaliknya, maka dalam tempoh itu tenaga kinetik beban dan tenaga potensi spring dibandingkan antara satu sama lain empat kali (jawapannya ialah 2 ).
Amplitud turun naik kelajuan ( tugasan 11.1.10) paling mudah dicari mengikut undang-undang pemuliharaan tenaga. Pada titik pesongan maksimum, tenaga sistem ayunan adalah sama dengan tenaga potensi spring.  , di manakah pekali kekakuan spring, ialah amplitud ayunan. Apabila melalui kedudukan keseimbangan, tenaga badan adalah sama dengan tenaga kinetik
, di manakah pekali kekakuan spring, ialah amplitud ayunan. Apabila melalui kedudukan keseimbangan, tenaga badan adalah sama dengan tenaga kinetik  , di manakah jisim badan, ialah kelajuan badan apabila melalui kedudukan keseimbangan, iaitu kelajuan maksimum jasad dalam proses ayunan dan, oleh itu, mewakili amplitud ayunan halaju. Menyamakan tenaga ini, kami dapati
, di manakah jisim badan, ialah kelajuan badan apabila melalui kedudukan keseimbangan, iaitu kelajuan maksimum jasad dalam proses ayunan dan, oleh itu, mewakili amplitud ayunan halaju. Menyamakan tenaga ini, kami dapati
(jawapan 4 ).
Daripada formula (11.5) kita membuat kesimpulan ( tugasan 11.2.2) bahawa tempohnya tidak bergantung pada jisim bandul matematik, dan dengan pertambahan panjang sebanyak 4 kali ganda, tempoh ayunan bertambah sebanyak 2 kali (jawapannya ialah 1 ).
Jam tangan adalah proses berayun, yang digunakan untuk mengukur selang masa ( tugasan 11.2.3). Perkataan jam "rush" bermaksud bahawa tempoh proses ini kurang daripada itu apa yang sepatutnya. Oleh itu, untuk menjelaskan perjalanan jam ini, adalah perlu untuk meningkatkan tempoh proses. Menurut formula (11.5), untuk meningkatkan tempoh ayunan bandul matematik, adalah perlu untuk menambah panjangnya (jawapannya ialah 3 ).
Untuk mencari amplitud ayunan dalam tugasan 11.2.4, adalah perlu untuk mewakili pergantungan koordinat badan pada masa dalam bentuk fungsi trigonometri tunggal. Untuk fungsi yang diberikan dalam keadaan, ini boleh dilakukan dengan memperkenalkan sudut tambahan. Mendarab dan membahagi fungsi ini dengan  dan menggunakan formula penambahan fungsi trigonometri, kita mendapatkan
dan menggunakan formula penambahan fungsi trigonometri, kita mendapatkan
|

di manakah sudut sedemikian  . Daripada formula ini ia mengikuti bahawa amplitud ayunan badan adalah
. Daripada formula ini ia mengikuti bahawa amplitud ayunan badan adalah  (jawapan 4
).
(jawapan 4
).
Selamat petang!
Semuanya cukup mudah. Sekarang saya boleh katakan beberapa kata majmuk, tetapi kemudian saya akan cuba menerangkan maksudnya. Untuk kesederhanaan pembentangan, kita akan bercakap tentang kes satu dimensi; segala-galanya boleh digeneralisasikan dengan mudah kepada kes yang mempunyai banyak darjah kebebasan.
Jadi, tugas utama mekanik --- untuk mencari pergantungan koordinat badan pada masa, iaitu, sebenarnya, untuk mencari beberapa fungsi yang mengaitkan nilai koordinat tertentu dengan setiap saat masa. Kami menerangkan sebarang pergerakan menggunakan hukum kedua Newton. Undang-undang ini termasuk pecutan, yang merupakan terbitan kedua koordinat badan berkenaan dengan masa, dan daya, yang biasanya bergantung pada koordinat itu sendiri. Juga, daya mungkin bergantung pada kelajuan badan, iaitu, pada terbitan pertama koordinat berkenaan dengan masa. Justeru, dengan titik matematik Dari segi pandangan, hukum kedua Newton mewakili hubungan tertentu antara koordinat, terbitan pertama dan kedua. Hubungan ini dipanggil dalam matematik persamaan pembezaan. Derivatif tertinggi yang termasuk dalam persamaan tersebut ialah yang kedua. Matematik mengatakan bahawa penyelesaian persamaan sedemikian, iaitu bentuk umum fungsi yang memenuhi hubungan kita bergantung pada dua pemalar arbitrari yang tidak dapat ditentukan daripada persamaan. Pemalar sewenang-wenang ini ditentukan berdasarkan kes demi kes, contohnya, melalui apa yang dipanggil keadaan awal. Iaitu, untuk memahami dengan tepat bagaimana badan akan bergerak, anda perlu mengetahui bukan sahaja daya yang bertindak ke atasnya, tetapi juga koordinat dan kelajuan awalnya. Dua pemalar arbitrari dalam penyelesaian dipilih sedemikian rupa sehingga fungsi yang diperolehi oleh kita dan terbitannya (iaitu, kelajuan) dalam detik awal masa telah memberi nilai.
Ia benar-benar keadaan umum. Ingat apabila kita bercakap tentang pergerakan badan dengan pecutan berterusan, untuk menetapkan pergerakan dengan tepat, kita memerlukan tepat dua nombor, koordinat awal dan kelajuan permulaan.
Perkara yang sama berlaku untuk ayunan. Ayunan bandul tertentu (iaitu bandul dengan frekuensi semula jadi tertentu) juga ditentukan oleh dua nombor. Biasanya, penyelesaian persamaan bandul yang diperoleh daripada hukum kedua Newton ditulis sebagai .
Di sini mereka hanya memainkan peranan pemalar sewenang-wenangnya, yang mesti ditentukan dari keadaan awal. Jom kira kelajuan: . Beritahu kami bahawa dalam momen sifar masa, koordinat dan halaju bandul adalah sama dan . Setelah menyelesaikan sistem persamaan biasa, seseorang boleh mencari ungkapan khusus untuk dan melalui dan .
Saya tidak akan memberikan jawapan kepada kes am jika anda mahu, anda boleh melakukannya sendiri dengan mudah. Saya hanya akan bercakap tentang kes tertentu. Biarkan, sebagai contoh, diketahui bahawa pada saat sifar masa badan berada dalam keseimbangan (iaitu, ), dan kelajuannya adalah sama dengan nilai maksimumnya (iaitu, ). Kemudian kami memperoleh untuk kes tertentu kami bahawa sistem persamaan mengambil bentuk: . Daripada persamaan pertama, ia serta-merta jelas bahawa (sudah tentu, persamaan pertama juga memenuhi syarat , tetapi kemudian penyelesaian kita akan menjadi sifar, tetapi ini tidak sesuai dengan kita). Yang kedua kemudian mengambil bentuk: , dari mana . Oleh itu, kami telah menemui ungkapan untuk kedua-dua pemalar. Akibatnya, kami mempunyai: Pada masa yang sama, untuk pecutan ternyata. Jika sekarang kita menyatakan dengan ungkapan yang lebih biasa untuk amplitud , kita mendapat formula yang lebih biasa.
Mari kita pertimbangkan satu lagi contoh. Sekarang biarkan kargo masuk kedudukan yang melampau, iaitu kelajuannya ialah sifar. Kami akan menganggap bahawa ia menyimpang dari sisi negatif paksi, iaitu, koordinatnya ialah . Kemudian persamaan untuk keadaan awal ambil borang: daripada persamaan kedua. Dari yang pertama: . Oleh itu, untuk koordinat mempunyai: (kesamaan kedua menggunakan formula pengurangan). Untuk kelajuan: . Untuk mempercepatkan: .
Formula khusus bergantung pada data awal. Mengambil kira keberkalaan sinus dan kosinus, menggunakan formula yang berbeza cast, anda boleh mengalih keluar tanda daripada formula, menambah fasa, dsb.
Bagi formula dalam masalah, tidak ada , kekerapan, kerana nilai khususnya digantikan:
Getaran percuma dibuat di bawah pengaruh kuasa dalaman sistem selepas sistem telah dibawa keluar daripada keseimbangan.
Untuk getaran bebas dibuat mengikut undang-undang harmonik, adalah perlu bahawa daya yang cenderung untuk mengembalikan jasad ke kedudukan keseimbangan harus berkadar dengan anjakan jasad dari kedudukan keseimbangan dan diarahkan ke arah yang bertentangan dengan anjakan (lihat § 2.1):
Kekuatan mana-mana yang lain sifat fizikal memenuhi syarat ini dipanggil separa anjal .
Oleh itu, beban beberapa jisim m dilekatkan pada spring yang mengeras k, hujung kedua yang tetap tidak bergerak (Rajah 2.2.1), membentuk sistem yang mampu melakukan ayunan harmonik bebas tanpa ketiadaan geseran. Jisim pada spring dipanggil harmonik linear pengayun.
Kekerapan bulat ω 0 getaran percuma Berat pada spring didapati daripada hukum kedua Newton:
Dengan susunan mendatar sistem beban spring, daya graviti yang dikenakan pada beban diimbangi oleh daya tindak balas sokongan. Jika beban digantung pada spring, maka daya graviti diarahkan di sepanjang garis pergerakan beban. Dalam kedudukan keseimbangan, spring diregangkan dengan jumlah x 0 sama dengan
Oleh itu, hukum kedua Newton untuk beban pada spring boleh ditulis sebagai
Persamaan (*) dipanggil persamaan getaran bebas . Perlu diingatkan bahawa ciri-ciri fizikal sistem ayunan tentukan hanya frekuensi semula jadi ayunan ω 0 atau tempoh T . Parameter proses ayunan seperti amplitud x m dan fasa awal φ 0 ditentukan dengan cara sistem dibawa keluar daripada keseimbangan pada saat permulaan masa.
Jika, sebagai contoh, beban telah disesarkan dari kedudukan keseimbangan dengan jarak Δ l dan kemudian pada masanya t= 0 dilepaskan tanpa kelajuan awal, maka x m = ∆ l, φ 0 = 0.
Walau bagaimanapun, jika kelajuan awal ± υ 0 diberikan kepada beban, yang berada dalam kedudukan keseimbangan, dengan bantuan tolakan tajam, maka,
Jadi amplitud x m ayunan bebas dan fasa awalnya φ 0 ditentukan keadaan awal .
Terdapat banyak jenis sistem ayunan mekanikal yang menggunakan daya ubah bentuk elastik. Pada rajah. 2.2.2 menunjukkan analog sudut bagi pengayun harmonik linear. Cakera yang terletak secara mendatar tergantung pada benang elastik yang dipasang di pusat jisimnya. Apabila cakera berputar melalui sudut θ, satu momen daya timbul M ketegangan kilasan elastik:
di mana saya = saya C - momen inersia cakera mengenai paksi yang melalui pusat jisim, ε - pecutan sudut.
Dengan analogi dengan beban pada spring, anda boleh mendapatkan:
Getaran percuma. Bandul matematik
Bandul matematik dipanggil badan bersaiz kecil, digantung pada benang nipis yang tidak dapat dipanjangkan, jisimnya boleh diabaikan berbanding dengan jisim badan. Dalam kedudukan keseimbangan, apabila bandul digantung pada garis tegak, daya graviti diimbangi oleh daya tegangan benang. Apabila bandul menyimpang dari kedudukan keseimbangan dengan sudut tertentu φ, komponen tangen graviti muncul F τ = - mg sin φ (Rajah 2.3.1). Tanda tolak dalam formula ini bermakna komponen tangen diarahkan ke arah yang bertentangan dengan pesongan bandul.
Jika dilambangkan dengan x anjakan linear bandul dari kedudukan keseimbangan di sepanjang lengkok bulatan jejari l, maka anjakan sudutnya akan sama dengan φ = x / l. Hukum kedua Newton, yang ditulis untuk unjuran vektor pecutan dan daya pada arah tangen, memberikan:
Hubungan ini menunjukkan bahawa bandul matematik adalah kompleks bukan linear sistem, kerana daya yang cenderung untuk mengembalikan bandul ke kedudukan keseimbangannya adalah berkadar dengan bukan sesaran x, a
Hanya dalam kes turun naik kecil bila dekat boleh digantikan dengan bandul matematik ialah pengayun harmonik, iaitu sistem yang mampu melakukan ayunan harmonik. Dalam amalan, anggaran ini sah untuk sudut tertib 15-20°; manakala nilainya berbeza tidak lebih daripada 2%. Ayunan bandul pada amplitud besar tidak harmonik.
Untuk ayunan kecil bandul matematik, hukum kedua Newton ditulis sebagai
Formula ini menyatakan kekerapan semula jadi ayunan kecil bandul matematik .
Akibatnya,
|

Mana-mana jasad yang dipasang pada paksi putaran mendatar mampu melakukan ayunan bebas dalam medan graviti dan, oleh itu, juga merupakan bandul. Bandul sedemikian dipanggil fizikal (Gamb. 2.3.2). Ia berbeza daripada matematik hanya dalam pengagihan jisim. Dalam kedudukan keseimbangan yang stabil, pusat jisim C bandul fizikal berada di bawah paksi putaran O pada menegak yang melalui paksi. Apabila bandul menyimpang dengan sudut φ, satu momen graviti timbul, cenderung untuk mengembalikan bandul ke kedudukan keseimbangan:
dan hukum kedua Newton untuk bandul fizikal menjadi (lihat §1.23)
Di sini ω 0 - kekerapan semula jadi ayunan kecil bandul fizikal .
Akibatnya,
Oleh itu, persamaan yang menyatakan hukum kedua Newton untuk bandul fizik boleh ditulis sebagai
Akhir sekali, untuk frekuensi bulat ω 0 ayunan bebas bandul fizikal, ungkapan berikut diperolehi:
|

Transformasi tenaga semasa getaran mekanikal bebas
Apabila bebas getaran mekanikal tenaga kinetik dan potensi berubah secara berkala. Pada sisihan maksimum badan dari kedudukan keseimbangan, halajunya, dan oleh itu tenaga kinetik, lenyap. Dalam kedudukan ini, tenaga potensi badan berayun mencapai nilai maksimum. Untuk beban pada spring, tenaga keupayaan ialah tenaga ubah bentuk anjal spring. Untuk bandul matematik, ini adalah tenaga dalam medan graviti Bumi.
Apabila jasad dalam pergerakannya melepasi kedudukan keseimbangan, kelajuannya adalah maksimum. Badan melangkau kedudukan keseimbangan mengikut hukum inersia. Pada masa ini, ia mempunyai tenaga kinetik maksimum dan potensi minimum. Peningkatan tenaga kinetik berlaku dengan mengorbankan pengurangan tenaga keupayaan. Dengan pergerakan selanjutnya, tenaga potensi mula meningkat disebabkan oleh penurunan tenaga kinetik, dsb.
Oleh itu, semasa ayunan harmonik, perubahan berkala tenaga kinetik kepada tenaga berpotensi dan sebaliknya berlaku.
Jika tiada geseran dalam sistem ayunan, maka jumlah tenaga mekanikal semasa getaran bebas kekal tidak berubah.
Untuk beban spring(lihat §2.2):
Dalam keadaan sebenar, mana-mana sistem ayunan berada di bawah pengaruh daya geseran (rintangan). Dalam kes ini, sebahagian daripada tenaga mekanikal ditukar menjadi tenaga dalaman gerakan terma atom dan molekul, dan getaran menjadi pudar (Gamb. 2.4.2).
Kadar redaman ayunan bergantung pada magnitud daya geseran. Selang masa τ semasa amplitud ayunan berkurangan e≈ 2.7 kali, dipanggil masa reput .
Kekerapan ayunan bebas bergantung pada kadar redaman ayunan. Apabila daya geseran meningkat, frekuensi semula jadi berkurangan. Walau bagaimanapun, perubahan dalam frekuensi semula jadi menjadi ketara hanya pada daya geseran yang cukup besar, apabila ayunan semula jadi dengan cepat mereput.
Satu ciri penting sistem ayunan yang menjadikan percuma ayunan yang dilembapkan, ialah faktor kualiti Q. Parameter ini ditakrifkan sebagai nombor N jumlah ayunan yang dibuat oleh sistem semasa masa redaman τ, didarab dengan π:
Oleh itu, faktor kualiti mencirikan kehilangan tenaga relatif sistem ayunan disebabkan oleh kehadiran geseran dalam selang masa yang sama dengan satu tempoh ayunan.
Getaran paksa. Resonans. Ayunan diri
Ayunan yang berlaku di bawah pengaruh daya berkala luaran dipanggil terpaksa.
Daya luaran melakukan kerja positif dan memberikan kemasukan tenaga kepada sistem ayunan. Ia tidak membenarkan ayunan pudar, walaupun tindakan daya geseran.
Daya luaran berkala boleh berubah mengikut masa mengikut pelbagai undang-undang. Kepentingan khusus ialah kes apabila daya luaran, berubah mengikut undang-undang harmonik dengan frekuensi ω, bertindak pada sistem ayunan yang mampu melakukan ayunan semula jadi pada frekuensi tertentu ω 0 .
Jika ayunan bebas berlaku pada frekuensi ω 0, yang ditentukan oleh parameter sistem, maka ayunan paksa yang mantap sentiasa berlaku pada kekerapan ω daya luar.
Selepas permulaan kesan daya luaran pada sistem ayunan, beberapa waktu Δ t untuk menubuhkan getaran paksa. Masa mendap adalah sama mengikut urutan magnitud dengan masa pereputan τ ayunan bebas dalam sistem ayunan.
Pada saat awal, kedua-dua proses teruja dalam ayunan paksa sistem ayunan pada frekuensi ω dan ayunan bebas pada frekuensi semula jadi ω 0 . Tetapi getaran bebas diredam kerana kehadiran daya geseran yang tidak dapat dielakkan. Oleh itu, selepas beberapa lama, hanya ayunan pegun pada frekuensi ω daya penggerak luaran kekal dalam sistem ayunan.
Pertimbangkan, sebagai contoh, getaran paksa jasad pada spring (Rajah 2.5.1). Daya luaran dikenakan pada hujung bebas spring. Ia memaksa hujung spring bebas (ditinggalkan dalam Rajah 2.5.1) untuk bergerak mengikut undang-undang
Jika hujung kiri spring disesarkan dengan jarak y, dan yang betul - pada jarak jauh x dari kedudukan asalnya, apabila spring tidak cacat, maka pemanjangan spring Δ l sama dengan:
Dalam persamaan ini, daya yang bertindak ke atas jasad diwakili sebagai dua sebutan. Sebutan pertama di sebelah kanan ialah daya kenyal yang cenderung untuk mengembalikan badan ke kedudukan keseimbangan ( x= 0). Istilah kedua ialah kesan berkala luaran pada badan. Istilah ini dipanggil daya yang memaksa.
Persamaan yang menyatakan hukum kedua Newton untuk jasad pada spring dengan kehadiran tindakan berkala luaran boleh diberikan bentuk matematik, jika kita mengambil kira hubungan antara pecutan badan dan koordinatnya: Kemudian akan ditulis dalam borang
Persamaan (**) tidak mengambil kira tindakan daya geseran. Tidak seperti persamaan ayunan bebas(*) (lihat §2.2) persamaan getaran paksa(**) mengandungi dua frekuensi - frekuensi ω 0 ayunan bebas dan frekuensi ω daya penggerak.
Ayunan paksa yang mantap bagi beban pada spring berlaku pada frekuensi pengaruh luar dalam undang-undang
|
Amplitud getaran paksa x m dan fasa awal θ bergantung pada nisbah frekuensi ω 0 dan ω dan pada amplitud y m daya luaran.
Pada frekuensi yang sangat rendah, apabila ω<< ω 0 , движение тела массой m, dilekatkan pada hujung kanan spring, mengulangi pergerakan hujung kiri spring. Di mana x(t) = y(t), dan spring kekal praktikal tidak cacat. Daya luaran yang dikenakan pada hujung kiri spring tidak berfungsi, kerana modulus daya ini pada ω<< ω 0 стремится к нулю.
Jika frekuensi ω daya luar menghampiri frekuensi semula jadi ω 0, terdapat peningkatan mendadak dalam amplitud ayunan paksa. Fenomena ini dipanggil resonans . Pergantungan amplitud x m ayunan paksa daripada frekuensi ω daya penggerak dipanggil ciri resonans atau lengkung resonans(Gamb. 2.5.2).
Pada resonans, amplitud x turun naik beban m boleh berkali-kali lebih besar daripada amplitud y m ayunan hujung bebas (kiri) spring, disebabkan oleh tindakan luar. Sekiranya tiada geseran, amplitud ayunan paksa pada resonans harus meningkat selama-lamanya. Dalam keadaan sebenar, amplitud ayunan paksa keadaan mantap ditentukan oleh keadaan: kerja daya luar semasa tempoh ayunan mestilah sama dengan kehilangan tenaga mekanikal pada masa yang sama akibat geseran. Lebih sedikit geseran (iaitu, lebih tinggi faktor kualiti Q sistem ayunan), semakin besar amplitud ayunan paksa pada resonans.
Untuk sistem berayun dengan faktor kualiti yang tidak begitu tinggi (< 10) резонансная частота несколько смещается в сторону низких частот. Это хорошо заметно на рис. 2.5.2.
Fenomena resonans boleh menyebabkan kemusnahan jambatan, bangunan dan struktur lain, jika frekuensi semula jadi ayunan mereka bertepatan dengan frekuensi daya bertindak secara berkala, yang telah timbul, sebagai contoh, disebabkan oleh putaran motor yang tidak seimbang.
Getaran paksa adalah tidak lembap turun naik. Kehilangan tenaga yang tidak dapat dielakkan akibat geseran diimbangi oleh bekalan tenaga daripada sumber luar daya yang bertindak secara berkala. Terdapat sistem di mana ayunan tidak terendam timbul bukan disebabkan oleh pengaruh luaran berkala, tetapi sebagai hasil daripada keupayaan sistem sedemikian untuk mengawal aliran tenaga daripada sumber tetap. Sistem sedemikian dipanggil berayun sendiri, dan proses ayunan tidak terendam dalam sistem sedemikian - ayunan diri . Dalam sistem ayunan sendiri, tiga elemen ciri boleh dibezakan - sistem ayunan, sumber tenaga dan peranti maklum balas antara sistem ayunan dan sumber. Sebagai sistem ayunan, mana-mana sistem mekanikal yang mampu melakukan ayunan terlembapnya sendiri (contohnya, bandul jam dinding) boleh digunakan.
Sumber tenaga boleh menjadi tenaga ubah bentuk spring atau tenaga potensi beban dalam medan graviti. Peranti maklum balas ialah mekanisme yang sistem ayunan sendiri mengawal aliran tenaga daripada sumber. Pada rajah. 2.5.3 menunjukkan gambar rajah interaksi pelbagai unsur sistem berayun sendiri.
Contoh sistem ayunan diri mekanikal ialah kerja jam dengan sauh bergerak (Rajah 2.5.4). Roda larian dengan gigi serong diikat dengan tegar pada dram bergigi, di mana rantai dengan berat dilemparkan. Dilekatkan pada hujung atas bandul sauh(sauh) dengan dua plat bahan keras, melengkung sepanjang lengkok bulatan dengan pusat pada paksi bandul. Dalam jam tangan, berat digantikan dengan spring, dan bandul digantikan dengan pengimbang - roda tangan yang diikat pada spring lingkaran. Pengimbang melakukan getaran kilasan di sekeliling paksinya. Sistem ayunan dalam jam adalah bandul atau pengimbang.
Sumber tenaga ialah beban yang diangkat atau spring luka. Peranti maklum balas ialah sauh yang membolehkan roda larian memusingkan satu gigi dalam satu separuh kitaran. Maklum balas diberikan oleh interaksi sauh dengan roda larian. Dengan setiap ayunan bandul, gigi roda perjalanan menolak garpu penambat ke arah pergerakan bandul, memindahkan kepadanya bahagian tertentu tenaga, yang mengimbangi kehilangan tenaga akibat geseran. Oleh itu, tenaga potensi berat (atau spring berpintal) secara beransur-ansur, dalam bahagian berasingan, dipindahkan ke bandul.
Sistem ayunan diri mekanikal meluas dalam kehidupan di sekeliling kita dan dalam teknologi. Ayunan sendiri dilakukan oleh enjin stim, enjin pembakaran dalaman, loceng elektrik, tali alat muzik tunduk, lajur udara dalam paip alat tiup, pita suara semasa bercakap atau menyanyi, dsb.
 |
| Rajah 2.5.4. Mekanisme jam dengan bandul. |
Apabila ayunan berlaku di sekolah, ia digambarkan oleh dua contoh paling mudah: pemberat pada spring dan bandul matematik (iaitu pemberat titik pada benang yang tidak dapat dipanjangkan) dalam bidang graviti. Dalam kedua-dua kes, keteraturan penting diperhatikan dalam ayunan: tempohnya tidak bergantung pada amplitud - sekurang-kurangnya selagi amplitud ini kekal kecil - tetapi hanya ditentukan oleh sifat mekanikal sistem.
Sekarang mari kita gabungkan kedua-dua contoh ini dan pertimbangkan getaran berat yang digantung pada spring tegangan dalam medan graviti (Rajah 1).
Untuk kesederhanaan, kita mengabaikan dimensi ketiga dan menganggap bahawa pendulum spring ini berayun dengan ketat dalam satah rajah. Dalam kes ini, berat (yang juga dianggap sebagai berat titik) boleh bergerak dalam satah menegak dalam arah sewenang-wenangnya, dan bukan hanya atas dan bawah atau kiri dan kanan, seperti yang ditunjukkan dalam Rajah. 2. Tetapi jika sekali lagi kita mengehadkan diri kita hanya kepada penyimpangan kecil dari kedudukan keseimbangan, maka ayunan mendatar dan menegak berlaku hampir secara bebas, dengan tempoh mereka sendiri T x dan T y.
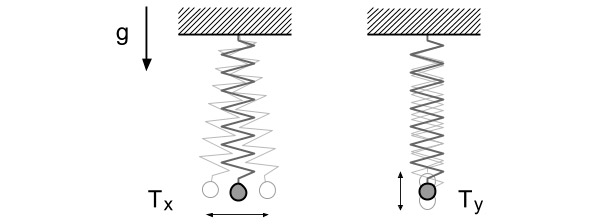
Nampaknya kerana ayunan ini ditentukan oleh daya dan ciri sistem yang sama sekali berbeza, maka tempoh mereka boleh menjadi sewenang-wenangnya, sama sekali tidak berkaitan antara satu sama lain. Ternyata - tidak!
Satu tugas
Buktikan bahawa untuk bandul sedemikian tempoh ayunan mendatar sentiasa lebih besar daripada tempoh yang menegak: T x > T y.
Petunjuk
Pada mulanya, masalah itu mungkin mengejutkan anda dengan fakta bahawa nampaknya tiada apa yang diberikan di dalamnya, tetapi sesuatu perlu dibuktikan. Tetapi tidak ada yang salah di sini. Apabila masalah dirumuskan dengan cara ini, ini bermakna anda boleh memperkenalkan sendiri beberapa notasi yang anda perlukan, mengira dengan mereka apa yang diperlukan, dan kemudian membuat kesimpulan yang sudah tidak bergantung daripada nilai-nilai ini. Lakukan untuk tugasan ini. Ambil formula untuk tempoh hayunan, fikirkan tentang kuantiti yang terlibat, dan bandingkan dua tempoh antara satu sama lain dengan membahagikan satu dengan yang lain.
Keputusan
Tempoh ayunan berat jisim m pada mata air yang mengeras k dan panjang L 0 ialah
 .
.
Formula ini tidak berubah walaupun berat digantung dalam medan graviti dengan pecutan jatuh bebas g. Sudah tentu, kedudukan keseimbangan berat akan beralih ke ketinggian Δ L = mg/k- dengan pemanjangan spring sedemikianlah daya kenyal mengimbangi daya graviti. Tetapi tempoh ayunan menegak tentang kedudukan keseimbangan baharu ini dengan spring yang diregangkan akan kekal sama.
Tempoh ayunan mendatar bandul yang diregangkan dinyatakan dalam sebutan pecutan graviti. g dan dia lengkap panjang L = L 0 +Δ L:
 .
.
Ia adalah terima kasih kepada regangan tambahan dalam medan graviti yang kami dapati

Itulah penyelesaian keseluruhan.
Akhir kata

Walaupun kesederhanaannya yang jelas, bandul pada spring adalah sistem yang cukup kaya dengan fenomena. Ini adalah salah satu contoh paling mudah fenomena comel - resonans Fermi. Ia terdiri daripada ini. Secara umumnya, jika beratnya ditarik dan dilepaskan, maka ia akan berayun secara menegak dan mendatar. Kedua-dua jenis ayunan ini hanya akan bertindih dan tidak mengganggu antara satu sama lain. Tetapi jika tempoh ayunan menegak dan mendatar dikaitkan dengan hubungan T x = 2T y, maka ayunan mendatar dan menegak, seolah-olah bertentangan dengan kehendak mereka, secara beransur-ansur akan bertukar menjadi satu sama lain, seperti dalam animasi di sebelah kanan. Tenaga getaran akan, seolah-olah, dipam daripada getaran menegak kepada getaran mendatar dan sebaliknya.
Ia kelihatan seperti ini: anda menarik berat ke bawah dan melepaskannya. Pada mulanya, ia hanya berayun ke atas dan ke bawah, kemudian dengan sendirinya ia mula bergoyang ke sisi, seketika ayunan menjadi hampir sepenuhnya mendatar, dan kemudian kembali ke menegak semula. Anehnya, ayunan menegak yang ketat ternyata tidak stabil.
Penjelasan kesan yang luar biasa ini, serta nisbah ajaib T x:T y= 2:1, itu sahaja. Nyatakan dengan x dan y sisihan berat daripada kedudukan keseimbangan (paksi y diarahkan ke atas). Dengan sisihan sedemikian, tenaga berpotensi berkembang mengikut jumlah
Ini adalah formula yang tepat, ia sesuai untuk sebarang penyelewengan, besar dan kecil. Tetapi kalau x dan y kecil, lebih kurang L, maka ungkapan itu lebih kurang sama dengan
ditambah dengan istilah lain yang mengandungi darjah sisihan yang lebih tinggi. Kuantiti U y dan U x adalah tenaga berpotensi biasa yang daripadanya ayunan menegak dan mendatar diperolehi. Dan inilah nilai yang diserlahkan dengan warna biru Uxy adalah bahan tambahan khas yang menjana interaksi antara getaran ini. Disebabkan oleh interaksi kecil ini, getaran menegak mempengaruhi getaran mendatar dan sebaliknya. Ini menjadi agak telus jika kita menjalankan pengiraan dengan lebih lanjut dan menulis persamaan untuk ayunan mendatar dan menegak:

di mana notasi
Tanpa penambahan biru, kita akan mempunyai ayunan bebas biasa secara menegak dan mendatar dengan frekuensi ωy dan ω x. Aditif ini memainkan peranan tenaga penggerak, tambahan mengepam getaran. Jika frekuensi ωy dan ω x adalah sewenang-wenangnya, maka daya kecil ini tidak membawa kepada apa-apa kesan yang ketara. Tetapi jika perhubungan ωy = 2ω x, resonans ditetapkan dalam: daya penggerak untuk kedua-dua jenis ayunan mengandungi komponen dengan frekuensi yang sama dengan ayunan itu sendiri. Akibatnya, daya ini perlahan-lahan tetapi tetap membina satu jenis ayunan dan menekan yang lain. Beginilah cara getaran mendatar dan menegak mengalir antara satu sama lain.

Kecantikan tambahan timbul jika, dalam contoh ini, dimensi ketiga diambil kira dengan jujur. Kami mengandaikan bahawa berat boleh memampat-menunclench spring secara menegak dan berayun seperti bandul dalam dua arah mendatar. Kemudian, apabila keadaan resonans dipenuhi, apabila dilihat dari atas, berat menulis trajektori bintang, seperti, sebagai contoh, dalam Rajah. 3. Ini berlaku kerana satah ayunan tidak kekal tidak bergerak, tetapi berputar - tetapi tidak lancar, tetapi seolah-olah dalam lompatan. Selagi goyangan bergerak dari sisi ke sisi, satah ini lebih kurang dipegang, dan pusingan berlaku dalam selang masa yang singkat apabila goyangan hampir menegak. Kami menjemput pembaca untuk berfikir sendiri apakah sebab untuk kelakuan ini dan apa yang menentukan sudut putaran pesawat. Dan mereka yang ingin terjun ke dalam tugas yang agak mendalam ini boleh melihat melalui artikel Stepwise Precession of the Resonant Swinging Spring , yang bukan sahaja memberikan analisis terperinci tentang masalah itu, tetapi juga bercakap tentang sejarahnya dan kaitan masalah ini dengan yang lain. bahagian fizik, khususnya dengan fizik atom.
 Mengapa seseorang menangis tanpa sebab
Mengapa seseorang menangis tanpa sebab Data am mengenai panjang jalan di Lebuhraya Trans-Siberia Persekutuan Rusia, Rusia
Data am mengenai panjang jalan di Lebuhraya Trans-Siberia Persekutuan Rusia, Rusia Bagaimana untuk mengira isipadu kotak?
Bagaimana untuk mengira isipadu kotak?