Lực nào tác dụng lên chuyển động của con lắc toán học. Bí mật của con lắc
con lắc toán họcđược gọi là một điểm vật chất được treo trên một sợi không trọng lượng và không thể giãn được gắn vào hệ thống treo và nằm trong trường trọng lực (hoặc lực khác).
Chúng ta nghiên cứu dao động của một con lắc toán học trong một hệ quy chiếu quán tính mà điểm treo của nó đứng yên hoặc chuyển động thẳng đều. Chúng ta sẽ bỏ qua lực cản của không khí (một con lắc toán học lý tưởng). Ban đầu con lắc đang đứng yên ở vị trí cân bằng C. Trong trường hợp này trọng lực tác dụng lên nó và lực đàn hồi F³np của sợi dây bù trừ lẫn nhau.
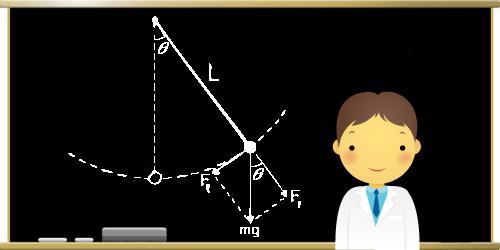
Ta đưa con lắc ra khỏi vị trí cân bằng (làm lệch nó về vị trí A chẳng hạn) rồi thả cho nó đi không vận tốc ban đầu (Hình 1). Trong trường hợp này, các lực và không cân bằng nhau. Thành phần tiếp tuyến của trọng lực, tác dụng lên con lắc, cung cấp cho nó một gia tốc tiếp tuyến a?? (thành phần của gia tốc toàn phần hướng dọc theo tiếp tuyến với quỹ đạo của con lắc toán học), và con lắc bắt đầu chuyển động về vị trí cân bằng với tốc độ tăng dần về giá trị tuyệt đối. Do đó, thành phần tiếp tuyến của lực hấp dẫn là lực phục hồi. Thành phần pháp tuyến của trọng lực hướng dọc theo sợi chỉ so với lực đàn hồi. Lực tổng hợp và cho biết gia tốc pháp tuyến của con lắc, làm thay đổi hướng của véc tơ vận tốc và con lắc chuyển động dọc theo cung tròn ABCD.

Con lắc càng tiến gần đến vị trí cân bằng C thì giá trị của thành phần tiếp tuyến càng nhỏ. Ở vị trí cân bằng, nó bằng không và vận tốc đạt giá trị cực đại, con lắc chuyển động thêm theo quán tính, đi lên dọc theo cung tròn. Trong trường hợp này, thành phần được hướng vào tốc độ. Với sự gia tăng góc lệch a, mô đun của lực tăng lên và mô đun vận tốc giảm xuống, và tại điểm D tốc độ của con lắc trở nên bằng không. Con lắc dừng lại một lúc rồi bắt đầu chuyển động ngược chiều về vị trí cân bằng. Sau khi vượt qua nó một lần nữa theo quán tính, con lắc, chậm lại, sẽ đến điểm A (không ma sát), tức là. làm cho một swing đầy đủ. Sau đó, chuyển động của con lắc sẽ được lặp lại theo trình tự đã được mô tả.
Ta thu được phương trình mô tả dao động tự do của con lắc toán học.
Cho con lắc tại một thời điểm đã cho ở điểm B. Độ dịch chuyển S của nó khỏi vị trí cân bằng tại thời điểm này bằng độ dài của cung CB (tức là S = |CB|). Gọi chiều dài của dây treo là l, và khối lượng của con lắc là m.
Hình 1 cho thấy rằng, ở đâu. Do đó con lắc bị lệch góc ( ) nhỏ, do đó
Dấu trừ trong công thức này được đặt vì thành phần tiếp tuyến của trọng lực hướng về vị trí cân bằng và độ dịch chuyển được tính từ vị trí cân bằng.
Theo định luật II Newton. Chúng tôi chiếu các đại lượng vectơ của phương trình này lên hướng của tiếp tuyến với quỹ đạo của con lắc toán học
Từ những phương trình này chúng ta nhận được
Phương trình động học của con lắc toán học. Gia tốc tiếp tuyến của con lắc toán học tỉ lệ với độ dời của nó và hướng về vị trí cân bằng. Phương trình này có thể được viết là
![]()
So sánh với phương trình dao động điều hòa ![]() , ta có thể kết luận rằng con lắc toán học thực hiện dao động điều hòa. Và vì các dao động đang xét của con lắc chỉ xảy ra dưới tác dụng của nội lực nên đây là các dao động tự do của con lắc. Do đó, dao động tự do của con lắc toán học có độ lệch nhỏ là dao động điều hòa.
, ta có thể kết luận rằng con lắc toán học thực hiện dao động điều hòa. Và vì các dao động đang xét của con lắc chỉ xảy ra dưới tác dụng của nội lực nên đây là các dao động tự do của con lắc. Do đó, dao động tự do của con lắc toán học có độ lệch nhỏ là dao động điều hòa.
Chứng tỏ
![]()
Tần số dao động điều hòa của con lắc.
Chu kì dao động của con lắc. Do đó,
Biểu thức này được gọi là công thức Huygens. Nó xác định chu kỳ dao động tự do của con lắc toán học. Từ công thức suy ra khi con lắc lệch so với vị trí cân bằng một góc nhỏ thì chu kì dao động của con lắc toán học là:
- không phụ thuộc vào khối lượng và biên độ dao động của nó;
- tỉ lệ nghịch với căn bậc hai của chiều dài con lắc và tỉ lệ nghịch với căn bậc hai của gia tốc rơi tự do.
Điều này phù hợp với các định luật thực nghiệm về dao động nhỏ của con lắc toán học do G. Galileo phát hiện.
Chúng tôi nhấn mạnh rằng công thức này có thể được sử dụng để tính khoảng thời gian khi hai điều kiện được đáp ứng đồng thời:
- dao động của con lắc phải nhỏ;
- điểm treo của con lắc phải đứng yên hoặc chuyển động thẳng đều so với hệ quy chiếu quán tính mà nó nằm trong đó.
Nếu điểm treo của con lắc toán học chuyển động có gia tốc, thì lực căng của sợi chỉ thay đổi, dẫn đến lực phục hồi thay đổi, kéo theo đó là tần số và chu kỳ dao động. Như các tính toán cho thấy, chu kỳ dao động của con lắc trong trường hợp này có thể được tính theo công thức
đâu là gia tốc "hiệu dụng" của con lắc trong hệ quy chiếu phi quán tính. Nó bằng tổng hình học của gia tốc trọng trường và vectơ ngược chiều với vectơ , tức là nó có thể được tính bằng công thức
Một hệ cơ học, bao gồm một điểm vật chất (cơ thể) được treo trên một sợi không trọng lượng không thể kéo dài (khối lượng của nó không đáng kể so với trọng lượng của cơ thể) trong trường trọng lực đều, được gọi là con lắc toán học (tên gọi khác là dao động) . Có nhiều loại khác của thiết bị này. Thay vì một sợi chỉ, bạn có thể sử dụng một thanh không trọng lượng. Một con lắc toán học có thể tiết lộ rõ ràng bản chất của nhiều hiện tượng thú vị. Với biên độ dao động nhỏ thì chuyển động của nó gọi là dao động điều hòa.
Thông tin chung về hệ thống cơ khí
Công thức tính chu kỳ dao động của con lắc này do nhà khoa học người Hà Lan Huygens (1629-1695) đưa ra. Người cùng thời với I. Newton này rất thích hệ cơ học này. Năm 1656, ông tạo ra chiếc đồng hồ quả lắc đầu tiên. Họ đã đo thời gian với độ chính xác đặc biệt cho những thời điểm đó. Phát minh này đã trở thành giai đoạn quan trọng nhất trong sự phát triển của các thí nghiệm vật lý và hoạt động thực tiễn.
Nếu con lắc ở vị trí cân bằng (treo thẳng đứng) thì nó sẽ cân bằng bằng lực căng sợi chỉ. Con lắc phẳng trên sợi dây không dãn là hệ có hai bậc tự do có mối nối. Khi bạn chỉ thay đổi một thành phần, các đặc điểm của tất cả các bộ phận của nó sẽ thay đổi. Vì vậy, nếu thay ren bằng thanh truyền thì hệ cơ này sẽ chỉ có 1 bậc tự do. Các tính chất của một con lắc toán học là gì? Trong hệ thống đơn giản nhất này, sự hỗn loạn phát sinh dưới ảnh hưởng của nhiễu loạn tuần hoàn. Trong trường hợp điểm treo không chuyển động mà dao động thì con lắc qua vị trí cân bằng mới. Với các dao động lên xuống nhanh chóng, hệ thống cơ học này có được vị trí lộn ngược ổn định. Cô ấy cũng có tên riêng của mình. Nó được gọi là con lắc Kapitza.
tính chất con lắc

Con lắc toán học có những tính chất rất thú vị. Tất cả chúng đều được xác nhận bởi các định luật vật lý đã biết. Chu kỳ dao động của bất kỳ con lắc nào khác phụ thuộc vào nhiều trường hợp khác nhau, chẳng hạn như kích thước và hình dạng của vật thể, khoảng cách giữa điểm treo và trọng tâm, sự phân bố khối lượng so với điểm này. Đó là lý do tại sao việc xác định thời gian treo cổ là một nhiệm vụ khá khó khăn. Việc tính chu kỳ của một con lắc toán học sẽ dễ dàng hơn nhiều, công thức sẽ được đưa ra dưới đây. Là kết quả của việc quan sát các hệ thống cơ học tương tự, các quy luật sau đây có thể được thiết lập:
Nếu trong khi duy trì cùng chiều dài của con lắc, treo các quả nặng khác nhau thì chu kỳ dao động của chúng sẽ giống nhau, mặc dù khối lượng của chúng sẽ khác nhau rất nhiều. Do đó, chu kỳ của một con lắc như vậy không phụ thuộc vào khối lượng của tải trọng.
Nếu khi khởi động hệ, con lắc bị lệch những góc không quá lớn nhưng khác nhau thì nó bắt đầu dao động với cùng chu kì nhưng biên độ khác nhau. Miễn là độ lệch khỏi tâm cân bằng không quá lớn, các dao động ở dạng của chúng sẽ khá gần với dao động điều hòa. Chu kỳ của một con lắc như vậy không phụ thuộc vào biên độ dao động theo bất kỳ cách nào. Thuộc tính này của hệ thống cơ học này được gọi là isochronism (được dịch từ tiếng Hy Lạp "chronos" - thời gian, "isos" - bằng nhau).
Chu kỳ của con lắc toán học
Chỉ báo này đại diện cho khoảng thời gian Mặc dù cách diễn đạt phức tạp nhưng bản thân quá trình này rất đơn giản. Nếu chiều dài sợi chỉ của con lắc toán học là L và gia tốc rơi tự do là g thì giá trị này bằng:
Chu kỳ của dao động tự nhiên nhỏ không phụ thuộc vào khối lượng của con lắc và biên độ dao động. Trong trường hợp này, con lắc chuyển động giống như một con lắc toán học với chiều dài giảm đi.
Dao động của con lắc toán học

Một con lắc toán học dao động, có thể được mô tả bằng một phương trình vi phân đơn giản:
x + ω2 sin x = 0,
trong đó x(t) là hàm chưa biết (đây là góc lệch so với vị trí cân bằng phía dưới tại thời điểm t, tính bằng radian); ω là hằng số dương được xác định từ các tham số của con lắc (ω = √g/L, trong đó g là gia tốc trọng trường và L là chiều dài của con lắc toán học (hệ thống treo).
Phương trình dao động nhỏ gần vị trí cân bằng (phương trình điều hòa) có dạng:
x + ω2 sin x = 0
Dao động điều hòa của con lắc
Một con lắc toán học tạo ra các dao động nhỏ di chuyển dọc theo hình sin. Phương trình vi phân cấp hai đáp ứng tất cả các yêu cầu và tham số của một chuyển động như vậy. Để xác định quỹ đạo, bạn phải chỉ định tốc độ và tọa độ, từ đó xác định các hằng số độc lập:
x \u003d Một tội lỗi (θ 0 + ωt),
trong đó θ 0 là pha ban đầu, A là biên độ dao động, ω là tần số tuần hoàn được xác định từ phương trình chuyển động.
Con lắc toán học (công thức cho biên độ lớn)
Hệ thống cơ học này, tạo ra các dao động với biên độ đáng kể, tuân theo các định luật chuyển động phức tạp hơn. Đối với một con lắc như vậy, chúng được tính theo công thức:
sin x/2 = u * sn(ωt/u),
trong đó sn là sin Jacobian, đối với bạn< 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
trong đó ε = E/mL2 (mL2 là năng lượng của con lắc).
Chu kì dao động của con lắc đơn được xác định theo công thức:
trong đó Ω = π/2 * ω/2K(u), K là tích phân elip, π - 3,14.

Chuyển động của con lắc dọc theo dải phân cách
Một dải phân cách là một quỹ đạo của một hệ động lực có không gian pha hai chiều. Con lắc toán học chuyển động dọc theo nó không tuần hoàn. Tại một thời điểm xa vô tận, nó rơi từ vị trí cực trên xuống ngang với vận tốc bằng không, rồi được nhấc lên dần dần. Cuối cùng nó dừng lại, trở về vị trí ban đầu.
Nếu biên độ dao động của con lắc tiến tới số π , điều này chỉ ra rằng chuyển động trên mặt phẳng pha tiếp cận dải phân cách. Trong trường hợp này, dưới tác động của một lực định kỳ nhỏ, hệ thống cơ học thể hiện hành vi hỗn loạn.
Khi con lắc toán học lệch khỏi vị trí cân bằng một góc φ nào đó thì xuất hiện lực hấp dẫn có phương tiếp tuyến Fτ = -mg sin φ. Dấu trừ có nghĩa là thành phần tiếp tuyến này hướng ngược lại với hướng lệch của con lắc. Khi độ dời của con lắc dọc theo cung tròn bán kính L được kí hiệu là x thì độ dời góc của nó bằng φ = x/L. Định luật thứ hai, dành cho các phép chiếu và lực, sẽ cho giá trị mong muốn:
mg τ = Fτ = -mg sinx/L
Dựa trên mối quan hệ này, có thể thấy rằng con lắc này là một hệ phi tuyến tính, vì lực có xu hướng đưa nó trở lại vị trí cân bằng luôn không tỷ lệ thuận với độ dịch chuyển x, mà với sin x/L.
Chỉ khi con lắc toán học thực hiện dao động nhỏ thì nó mới là dao động điều hòa. Nói cách khác, nó trở thành một hệ thống cơ học có khả năng thực hiện các dao động điều hòa. Phép tính gần đúng này thực tế có giá trị đối với các góc 15-20°. Con lắc dao động với biên độ lớn thì không điều hòa.
Định luật Newton cho dao động nhỏ của con lắc

Nếu một hệ thống cơ học nhất định thực hiện các dao động nhỏ, định luật 2 của Newton sẽ như sau:
mg τ = Fτ = -m* g/L* x.
Dựa trên điều này, chúng ta có thể kết luận rằng con lắc toán học tỷ lệ thuận với độ dịch chuyển của nó bằng dấu trừ. Đây là điều kiện mà hệ thống trở thành một dao động điều hòa. Môđun của hệ số tỉ lệ giữa độ dời và gia tốc bằng bình phương của tần số chuyển động tròn:
ω02 = g/L; ω0 = √g/L.
Công thức này phản ánh tần số riêng của dao động nhỏ của loại con lắc này. Dựa vào cái này,
T = 2π/ ω0 = 2π√ g/L.
Tính toán dựa trên định luật bảo toàn năng lượng
Các tính chất của con lắc cũng có thể được mô tả bằng cách sử dụng định luật bảo toàn năng lượng. Trong trường hợp này, cần tính đến việc con lắc trong trường trọng lực bằng:
E = mg∆h = mgL(1 - cos α) = mgL2sin2 α/2
Tổng bằng động năng hoặc thế năng cực đại: Epmax = Ekmsx = E
Sau khi viết định luật bảo toàn năng lượng, đạo hàm của vế phải và vế trái của phương trình được lấy:
Vì đạo hàm của các hằng số bằng 0, nên (Ep + Ek)" = 0. Đạo hàm của tổng bằng tổng các đạo hàm:
Ep" = (mg/L*x2/2)" = mg/2L*2x*x" = mg/L*v + Ek" = (mv2/2) = m/2(v2)" = m/ 2* 2v*v" = mv*α,
Do đó:
Mg/L*xv + mva = v (mg/L*x + mα) = 0.
Dựa trên công thức cuối cùng, chúng tôi tìm thấy: α = - g/L*x.
Ứng dụng thực tế của con lắc toán học
Gia tốc thay đổi theo vĩ độ địa lý, vì mật độ vỏ trái đất không giống nhau trên khắp hành tinh. Trường hợp đá có mật độ cao hơn xảy ra, nó sẽ cao hơn một chút. Gia tốc của con lắc toán học thường được sử dụng để thăm dò địa chất. Nó được sử dụng để tìm kiếm các khoáng sản khác nhau. Chỉ cần đếm số lần dao động của con lắc, bạn có thể tìm thấy than hoặc quặng trong lòng Trái đất. Điều này là do thực tế là những hóa thạch như vậy có mật độ và khối lượng lớn hơn những tảng đá lỏng lẻo bên dưới chúng.

Con lắc toán học đã được sử dụng bởi các nhà khoa học lỗi lạc như Socrates, Aristotle, Plato, Plutarch, Archimedes. Nhiều người trong số họ tin rằng hệ thống máy móc này có thể ảnh hưởng đến số phận và cuộc sống của một người. Archimedes đã sử dụng một con lắc toán học trong các tính toán của mình. Ngày nay, nhiều nhà huyền bí và tâm linh sử dụng hệ thống máy móc này để thực hiện những lời tiên tri của họ hoặc tìm kiếm những người mất tích.
Nhà thiên văn học và tự nhiên học nổi tiếng người Pháp C. Flammarion cũng sử dụng con lắc toán học cho nghiên cứu của mình. Anh ta tuyên bố rằng với sự giúp đỡ của mình, anh ta có thể dự đoán việc phát hiện ra một hành tinh mới, sự xuất hiện của thiên thạch Tunguska và các sự kiện quan trọng khác. Trong Chiến tranh thế giới thứ hai ở Đức (Berlin), một viện nghiên cứu con lắc chuyên dụng đã hoạt động. Ngày nay, Viện Cận tâm lý học Munich đang tham gia vào nghiên cứu tương tự. Các nhân viên của tổ chức này gọi công việc của họ với con lắc là "xạ trị".
con lắc toán học- đây là một điểm vật chất được treo trên một sợi chỉ không trọng lượng và không thể giãn được nằm trong trường trọng lực của Trái đất. Con lắc toán học là một mô hình lý tưởng hóa mô tả chính xác một con lắc thực chỉ trong những điều kiện nhất định. Một con lắc thực có thể được coi là toán học nếu chiều dài của sợi chỉ lớn hơn nhiều so với kích thước của vật thể treo trên nó, khối lượng của sợi chỉ không đáng kể so với khối lượng của vật thể và độ biến dạng của sợi chỉ rất nhỏ. rằng chúng có thể bị bỏ qua hoàn toàn.
Hệ dao động trong trường hợp này được hình thành bởi một sợi chỉ, một vật thể gắn vào nó và Trái đất, nếu không có nó thì hệ thống này không thể hoạt động như một con lắc.
ở đâu một X – sự tăng tốc, g - Gia tốc trọng lực, X- bù lại, tôi là chiều dài của dây treo con lắc.
Phương trình này được gọi là phương trình dao động tự do của con lắc toán học. Nó chỉ mô tả chính xác các dao động đang được xem xét khi các giả định sau được thỏa mãn:
2) chỉ xét các dao động nhỏ của con lắc có góc dao động nhỏ.
Dao động tự do của bất kỳ hệ thống nào trong mọi trường hợp được mô tả bằng các phương trình tương tự.
Nguyên nhân của dao động tự do của con lắc toán học là:
1. Tác dụng lên con lắc lực căng dây và trọng lực ngăn cản sự dịch chuyển của nó khỏi vị trí cân bằng và buộc nó rơi trở lại.
2. Quán tính của con lắc, do đó khi giữ nguyên vận tốc, nó không dừng lại ở vị trí cân bằng mà đi qua vị trí cân bằng thêm nữa.
Chu kỳ dao động tự do của con lắc toán học
Chu kỳ dao động tự do của con lắc toán học không phụ thuộc vào khối lượng của nó mà chỉ được xác định bởi chiều dài dây treo và gia tốc rơi tự do tại nơi đặt con lắc.
Chuyển hóa năng lượng trong dao động điều hòa
Với dao động điều hòa của con lắc lò xo, thế năng của một vật bị biến dạng đàn hồi chuyển hóa thành động năng của nó, trong đó k – hệ số đàn hồi, X - mô đun dịch chuyển con lắc khỏi vị trí cân bằng, tôi- khối lượng của con lắc, v- tốc độ của anh ta. Theo phương trình dao động điều hòa:
![]() ,
,
![]() .
.
Năng lượng toàn phần của con lắc lò xo:
![]() .
.
Tổng năng lượng cho một con lắc toán học:
![]()
Trong trường hợp con lắc toán học
Sự biến đổi năng lượng trong quá trình dao động của con lắc lò xo xảy ra tuân theo định luật bảo toàn cơ năng ( ![]() ). Khi con lắc đi lên hoặc đi xuống so với vị trí cân bằng thì thế năng của nó tăng, động năng giảm. Khi con lắc qua vị trí cân bằng ( X= 0) thì thế năng của nó bằng không và động năng của con lắc có giá trị lớn nhất, bằng thế năng toàn phần của nó.
). Khi con lắc đi lên hoặc đi xuống so với vị trí cân bằng thì thế năng của nó tăng, động năng giảm. Khi con lắc qua vị trí cân bằng ( X= 0) thì thế năng của nó bằng không và động năng của con lắc có giá trị lớn nhất, bằng thế năng toàn phần của nó.
Như vậy, trong quá trình con lắc dao động tự do, thế năng của nó biến đổi thành động năng, động năng thành thế năng, thế năng lại thành động năng, v.v.. Nhưng cơ năng toàn phần không đổi.
Dao động cưỡng bức. Cộng hưởng.
Dao động xảy ra dưới tác dụng của ngoại lực tuần hoàn gọi là dao động cưỡng bức. Một lực tuần hoàn bên ngoài, được gọi là động lực, truyền năng lượng bổ sung cho hệ dao động, được sử dụng để bổ sung năng lượng mất mát do ma sát. Nếu lực tác dụng biến đổi theo thời gian theo quy luật sin hoặc cosin thì dao động cưỡng bức là dao động điều hòa và không tắt dần.
Khác với dao động tự do, khi hệ chỉ nhận năng lượng một lần (khi hệ mất cân bằng), trong trường hợp dao động cưỡng bức, hệ liên tục hấp thụ năng lượng này từ một nguồn ngoại lực tuần hoàn. Năng lượng này bù cho những tổn thất dành cho việc vượt qua ma sát, và do đó tổng năng lượng của hệ dao động không thay đổi.
Tần số của dao động cưỡng bức bằng tần số của lực tác dụng. Khi tần số của động lực υ trùng với tần số riêng của hệ dao động υ 0 , biên độ dao động cưỡng bức tăng mạnh - cộng hưởng. Hiện tượng cộng hưởng xảy ra vì υ = υ 0 ngoại lực, tác dụng theo thời gian với các dao động tự do, luôn cùng hướng với vận tốc của vật dao động và thực hiện công dương: năng lượng của vật dao động tăng lên và biên độ dao động của nó trở nên lớn. Đồ thị sự phụ thuộc biên độ của dao động cưỡng bức NHƯNG t về tần số của động lực υ thể hiện trong hình, đồ thị này được gọi là đường cong cộng hưởng:

Hiện tượng cộng hưởng đóng một vai trò quan trọng trong một số quá trình tự nhiên, khoa học và công nghiệp. Ví dụ, cần tính đến hiện tượng cộng hưởng khi thiết kế cầu, tòa nhà và các công trình khác chịu rung động dưới tải trọng, nếu không, trong một số điều kiện nhất định, các công trình này có thể bị phá hủy.
Các con lắc thể hiện trong hình. 2, là các vật thể mở rộng có nhiều hình dạng và kích cỡ khác nhau, dao động xung quanh điểm treo hoặc điểm đỡ. Những hệ thống như vậy được gọi là con lắc vật lý. Ở trạng thái cân bằng, khi trọng tâm nằm trên phương thẳng đứng bên dưới điểm treo (hoặc giá đỡ), trọng lực được cân bằng (thông qua các lực đàn hồi của con lắc bị biến dạng) bởi phản lực của giá đỡ. Khi lệch khỏi vị trí cân bằng, trọng lực và lực đàn hồi xác định tại từng thời điểm gia tốc góc của con lắc, tức là xác định bản chất chuyển động của nó (dao động). Bây giờ chúng ta sẽ xem xét động lực học của các dao động một cách chi tiết hơn bằng cách sử dụng ví dụ đơn giản nhất về cái gọi là con lắc toán học, là một vật nặng nhỏ được treo trên một sợi chỉ dài và mảnh.
Trong một con lắc toán học, chúng ta có thể bỏ qua khối lượng của sợi chỉ và độ biến dạng của quả nặng, nghĩa là chúng ta có thể giả sử rằng khối lượng của con lắc tập trung ở quả nặng và lực đàn hồi tập trung ở sợi chỉ, được coi là không thể mở rộng. Bây giờ chúng ta hãy xem dưới ảnh hưởng của lực nào con lắc của chúng ta dao động sau khi nó bị đưa ra khỏi trạng thái cân bằng theo một cách nào đó (bằng cách đẩy, làm lệch hướng).
Khi con lắc nằm yên ở vị trí cân bằng, trọng lực tác dụng lên quả nặng của nó và hướng thẳng đứng xuống dưới cân bằng với lực căng dây. Ở vị trí bị lệch (Hình 15), trọng lực tác dụng nghiêng một góc so với lực căng hướng dọc theo sợi chỉ. Chúng tôi phân tách lực hấp dẫn thành hai thành phần: theo hướng của sợi dây () và vuông góc với nó (). Khi con lắc dao động, lực căng của sợi chỉ hơi vượt quá thành phần - bằng giá trị của lực hướng tâm, lực này làm cho tải trọng chuyển động theo một cung. Thành phần luôn hướng về vị trí cân bằng; cô ấy dường như đang cố gắng khôi phục lại vị trí này. Do đó, nó thường được gọi là lực phục hồi. Mô đun càng lớn, con lắc càng bị lệch.

Cơm. 15. Lực phục hồi khi con lắc lệch khỏi vị trí cân bằng
Vì vậy, ngay khi con lắc, trong quá trình dao động của nó, bắt đầu lệch khỏi vị trí cân bằng, chẳng hạn như sang phải, thì một lực xuất hiện làm chậm chuyển động của nó càng nhiều thì nó càng lệch xa. Cuối cùng, lực này sẽ ngăn anh ta lại và kéo anh ta trở lại vị trí cân bằng. Tuy nhiên, khi chúng ta tiến gần đến vị trí này, lực sẽ ngày càng giảm đi và ở vị trí cân bằng, chính nó sẽ chuyển thành không. Như vậy con lắc đi qua vị trí cân bằng theo quán tính. Ngay khi nó bắt đầu lệch sang trái, một lực sẽ lại xuất hiện, tăng dần khi độ lệch tăng lên, nhưng giờ hướng về bên phải. Chuyển động sang trái sẽ lại chậm lại, sau đó con lắc sẽ dừng lại một lúc, sau đó chuyển động tăng tốc sang phải sẽ bắt đầu, v.v.
Điều gì xảy ra với năng lượng của một con lắc khi nó dao động?
Hai lần trong khoảng thời gian - ở độ lệch lớn nhất sang trái và sang phải - con lắc dừng lại, tức là tại những thời điểm này tốc độ bằng không, nghĩa là động năng cũng bằng không. Nhưng chính tại những thời điểm này, trọng tâm của con lắc được nâng lên độ cao lớn nhất và do đó, thế năng là lớn nhất. Ngược lại, tại những thời điểm vật đi qua vị trí cân bằng thì thế năng là nhỏ nhất thì vận tốc và động năng đạt giá trị cực đại.
Ta giả sử rằng có thể bỏ qua lực ma sát của con lắc với không khí và lực ma sát tại điểm treo. Khi đó, theo định luật bảo toàn cơ năng, động năng cực đại này đúng bằng độ lớn của thế năng ở vị trí lệch lớn nhất so với thế năng ở vị trí cân bằng.
Vì vậy, khi con lắc dao động, xảy ra quá trình chuyển đổi tuần hoàn động năng thành thế năng và ngược lại, và chu kỳ của quá trình này bằng một nửa chu kỳ dao động của chính con lắc. Tuy nhiên, năng lượng toàn phần của con lắc (tổng của thế năng và động năng) luôn không đổi. Nó bằng với năng lượng được truyền cho con lắc lúc ban đầu, bất kể nó ở dạng thế năng (độ lệch ban đầu) hay ở dạng động năng (lực đẩy ban đầu).
Đây là trường hợp của tất cả các dao động khi không có ma sát hoặc bất kỳ quá trình nào khác lấy năng lượng từ hệ dao động hoặc truyền năng lượng cho nó. Đó là lý do tại sao biên độ không thay đổi và được xác định bởi độ lệch ban đầu hoặc lực đẩy.
Chúng ta nhận được những thay đổi tương tự về lực phục hồi và sự chuyển đổi năng lượng tương tự nếu thay vì treo quả bóng trên một sợi dây, chúng ta làm cho nó lăn trên một mặt phẳng thẳng đứng trong một chiếc cốc hình cầu hoặc trong một cái máng cong quanh chu vi. Trong trường hợp này, áp suất của thành cốc hoặc máng sẽ đảm nhận vai trò của lực căng chỉ (một lần nữa, chúng ta bỏ qua ma sát của quả bóng với thành và không khí).
Một con lắc toán học là một mô hình của một con lắc thông thường. Con lắc toán học là một điểm vật chất được treo trên một sợi dây dài không trọng lượng và không thể giãn ra.
Đưa quả cầu ra khỏi trạng thái cân bằng rồi thả. Có hai lực tác dụng lên quả bóng: trọng lực và lực căng của sợi dây. Khi con lắc chuyển động thì lực ma sát không khí vẫn tác dụng lên nó. Nhưng chúng ta sẽ coi nó rất nhỏ.
Chúng ta hãy phân tích lực hấp dẫn thành hai thành phần: lực hướng dọc theo sợi dây và lực hướng vuông góc với tiếp tuyến với quỹ đạo của quả bóng.
Hai lực này cộng lại thành trọng lực. Lực đàn hồi của sợi chỉ và thành phần trọng lực Fn truyền gia tốc hướng tâm cho quả bóng. Công của các lực này sẽ bằng không, và do đó chúng sẽ chỉ thay đổi hướng của vectơ vận tốc. Tại bất kỳ thời điểm nào, nó sẽ là tiếp tuyến của đường tròn.
Dưới tác dụng của thành phần trọng lực Fτ, quả cầu sẽ chuyển động dọc theo một cung tròn với vận tốc tăng dần về giá trị tuyệt đối. Giá trị của lực này luôn thay đổi về giá trị tuyệt đối, khi đi qua vị trí cân bằng thì nó bằng không.
Động năng của chuyển động dao động
Phương trình chuyển động của một vật dao động dưới tác dụng của lực đàn hồi.
Phương trình chuyển động tổng quát:
Dao động trong hệ xảy ra dưới tác dụng của lực đàn hồi, theo định luật Hooke, lực này tỉ lệ thuận với độ dịch chuyển của tải
Khi đó phương trình chuyển động của quả bóng sẽ có dạng sau:
Chia phương trình này cho m, ta được công thức sau:
Và vì khối lượng và hệ số đàn hồi là các giá trị không đổi, nên tỷ lệ (-k / m) cũng sẽ không đổi. Ta thu được phương trình mô tả dao động của một vật dưới tác dụng của lực đàn hồi.
Hình chiếu gia tốc của vật sẽ tỷ lệ thuận với tọa độ của nó, lấy dấu ngược lại.
Phương trình chuyển động của con lắc toán học
Phương trình chuyển động của con lắc toán học được mô tả bằng công thức sau:
Phương trình này có dạng giống như phương trình chuyển động của một tải trọng lên một lò xo. Do đó, dao động của con lắc và dao động của quả cầu trên lò xo xảy ra như nhau.
Độ dời của quả cầu trên lò xo và độ dời của con lắc khỏi vị trí cân bằng thay đổi theo thời gian theo cùng một quy luật.
 Nhà nguyện như một nguyên mẫu của báo chí
Nhà nguyện như một nguyên mẫu của báo chí Những câu trích dẫn về Napoléon - dslinkov — LiveJournal
Những câu trích dẫn về Napoléon - dslinkov — LiveJournal Tôi báo thù Người đàn ông trên chiếc máy ủi đã phá hủy thành phố
Tôi báo thù Người đàn ông trên chiếc máy ủi đã phá hủy thành phố