Trajektoor. Nihkevektori projektsioonid Keha nihke moodul ajas
Trajektoor(hilisladina trajektooridest – seotud liikumisega) on joon, mida mööda keha (materiaalne punkt) liigub. Liikumise trajektoor võib olla sirge (keha liigub ühes suunas) ja kõver, see tähendab, et mehaaniline liikumine võib olla sirgjooneline ja kõverjooneline.
Sirge trajektoor selles koordinaatsüsteemis on see sirgjoon. Näiteks võime eeldada, et auto trajektoor tasasel teel ilma pööreteta on sirge.
Kurviline liikumine on kehade liikumine ringis, ellipsis, paraboolis või hüperboolis. Kõverjoonelise liikumise näide on liikuva auto roolil oleva punkti liikumine või auto liikumine pöördes.
Liikumine võib olla raske. Näiteks keha trajektoor tema teekonna alguses võib olla sirgjooneline, seejärel kõver. Näiteks sõidu alguses liigub auto mööda sirget teed ja siis hakkab tee “tuulema” ja auto hakkab liikuma kõveras suunas.
Tee
Tee on trajektoori pikkus. Tee on skalaarsuurus ja seda mõõdetakse SI-süsteemis meetrites (m). Teekonna arvutamist tehakse paljudes füüsikaülesannetes. Mõningaid näiteid arutatakse hiljem selles õpetuses.
Liiguta vektorit
Liiguta vektorit(või lihtsalt liigub) on suunatud sirgjooneline segment, mis ühendab keha algset asendit selle järgneva asendiga (joonis 1.1). Nihe on vektorsuurus. Nihkevektor on suunatud liikumise alguspunktist lõpp-punkti.
Liikumisvektori moodul(st liikumise algus- ja lõpp-punkti ühendava lõigu pikkus) võib olla võrdne läbitud vahemaaga või väiksem kui läbitud vahemaa. Kuid nihkevektori suurus ei saa kunagi olla suurem kui läbitud vahemaa.
Nihkevektori suurus on võrdne läbitud teekonnaga, kui tee kattub trajektooriga (vt lõigud ja ), näiteks kui auto liigub punktist A punkti B mööda sirget teed. Nihkevektori suurus on väiksem kui läbitud vahemaa, kui materiaalne punkt liigub mööda kõverat rada (joonis 1.1).
Riis. 1.1. Nihkevektor ja läbitud vahemaa.
Joonisel fig. 1.1:
Veel üks näide. Kui auto sõidab ühe korra ringi, siis selgub, et punkt, kus liikumine algab, langeb kokku punktiga, kus liikumine lõpeb, ja siis on nihkevektor võrdne nulliga ja läbitud vahemaa võrdub ringi pikkus. Seega on tee ja liikumine kaks erinevat mõistet.
Vektori lisamise reegel
Nihkevektorid liidetakse geomeetriliselt vastavalt vektorite liitmise reeglile (kolmnurga reegel või rööpküliku reegel, vt joonis 1.2).

Riis. 1.2. Nihkevektorite liitmine.
Joonisel 1.2 on näidatud vektorite S1 ja S2 liitmise reeglid:
a) Liitmine kolmnurga reegli järgi
b) Liitmine rööpkülikureegli järgi
Liikumisvektori projektsioonid
Füüsika ülesannete lahendamisel kasutatakse sageli nihkevektori projektsioone koordinaattelgedele. Nihkevektori projektsioone koordinaatide telgedele saab väljendada selle lõpu ja alguse koordinaatide erinevuste kaudu. Näiteks kui materiaalne punkt liigub punktist A punkti B, siis nihkevektor (vt joonis 1.3).
Valime OX-telje nii, et vektor asub selle teljega samal tasapinnal. Langetame ristid punktidest A ja B (nihkevektori algus- ja lõpp-punktist), kuni need lõikuvad OX-teljega. Seega saame punktide A ja B projektsioonid teljele X. Tähistame punktide A ja B projektsioonid vastavalt kui A x ja B x. Lõigu A x B x pikkus OX-teljel on nihkevektori projektsioon OX-teljel, see tähendab
S x = A x B x
TÄHTIS!
Tuletan meelde neile, kes matemaatikat väga hästi ei tunne: ärge ajage vektorit segi vektori projektsiooniga ühelegi teljele (näiteks S x). Vektorit tähistab alati täht või mitu tähte, mille kohal on nool. Mõnes elektroonilises dokumendis ei ole noolt paigutatud, kuna see võib tekitada raskusi elektroonilise dokumendi loomisel. Sellistel juhtudel juhinduge artikli sisust, kus tähe kõrvale võib olla kirjutatud sõna "vektor" või muul viisil, mis viitab teile, et see on vektor, mitte ainult segment.

Riis. 1.3. Nihkevektori projektsioon.
Nihkevektori projektsioon OX-teljele on võrdne vektori lõpu ja alguse koordinaatide erinevusega, st
S x = x – x 0
Nihkevektori projektsioonid OY ja OZ telgedel määratakse ja kirjutatakse sarnaselt:
S y = y – y 0 S z = z – z 0
Siin on x 0 , y 0 , z 0 algkoordinaadid ehk keha (materiaalse punkti) lähteasendi koordinaadid; x, y, z - lõplikud koordinaadid ehk keha (materiaalse punkti) järgneva asukoha koordinaadid.
Nihkevektori projektsioon loetakse positiivseks, kui vektori suund ja koordinaattelje suund langevad kokku (nagu joonisel 1.3). Kui vektori suund ja koordinaattelje suund ei lange kokku (vastand), siis on vektori projektsioon negatiivne (joon. 1.4).
Kui nihkevektor on paralleelne teljega, siis on selle projektsiooni moodul võrdne Vektori enda mooduliga. Kui nihkevektor on teljega risti, siis on selle projektsiooni moodul võrdne nulliga (joon. 1.4).

Riis. 1.4. Liikumisvektori projektsioonimoodulid.
Mõne koguse järgnevate ja algväärtuste erinevust nimetatakse selle suuruse muutuseks. See tähendab, et nihkevektori projektsioon koordinaatide teljele on võrdne vastava koordinaadi muutusega. Näiteks juhul, kui keha liigub risti X-teljega (joonis 1.4), selgub, et keha EI LIIKU X-telje suhtes. See tähendab, et keha liikumine piki X-telge on null.
Vaatleme näidet keha liikumisest tasapinnal. Keha lähteasend on punkt A koordinaatidega x 0 ja y 0 ehk A(x 0, y 0). Keha lõppasend on punkt B koordinaatidega x ja y, see tähendab B(x, y). Leiame keha nihke mooduli.
Punktidest A ja B langetame ristid koordinaattelgedele OX ja OY (joon. 1.5).

Riis. 1.5. Keha liikumine tasapinnal.
Määrame nihkevektori projektsioonid OX ja OY telgedel:
S x = x – x 0 S y = y – y 0
Joonisel fig. 1.5 on selge, et kolmnurk ABC on täisnurkne kolmnurk. Sellest järeldub, et probleemi lahendamisel võib kasutada Pythagorase teoreem, mille abil saate leida nihkevektori mooduli, kuna
AC = s x CB = s y
Pythagorase teoreemi järgi
S 2 = S x 2 + S y 2
Kust leiate nihkevektori mooduli, st keha tee pikkuse punktist A punkti B:
Ja lõpuks soovitan teil oma teadmisi kinnistada ja oma äranägemise järgi mõned näited välja arvutada. Selleks sisestage koordinaadiväljadele mõned numbrid ja klõpsake nuppu ARVESTUS. Teie brauser peab toetama JavaScripti skriptide täitmist ja skripti täitmine peab olema teie brauseri seadetes lubatud, vastasel juhul arvutust ei teostata. Reaalarvudes tuleb täis- ja murdosa eraldada punktiga, näiteks 10,5.
Trajektoor- see on joon, mida keha liikumisel kirjeldab.
Mesilase trajektoor
Tee on trajektoori pikkus. See tähendab selle võimaliku kõvera joone pikkus, mida mööda keha liikus. Tee on skalaarsuurus! Liikumine- vektorkogus! See on vektor, mis on joonistatud keha algsest lähtepunktist lõpppunkti. Sellel on vektori pikkusega võrdne arvväärtus. Tee ja nihe on sisuliselt erinevad füüsikalised suurused.


Võite kohata erinevaid tee- ja liikumistähistusi:
Liikumiste hulk
Laske kehal ajaperioodil t 1 teha liikumist s 1 ja järgmisel ajaperioodil t 2 liikuda s 2. Siis kogu liikumisaja jooksul on nihe s 3 vektori summa

Ühtlane liikumine
Liikumine konstantse kiirusega suuruses ja suunas. Mida see tähendab? Mõelge auto liikumisele. Kui ta sõidab sirgjooneliselt, näitab spidomeeter sama kiiruse väärtust (kiirusmoodul), siis on see liikumine ühtlane. Niipea, kui auto muudab suunda (pööret), tähendab see, et kiirusvektor on oma suunda muutnud. Kiirusevektor on suunatud samasse suunda, kuhu auto sõidab. Sellist liikumist ei saa pidada ühtlaseks, hoolimata sellest, et spidomeeter näitab sama numbrit.
Kiirusevektori suund langeb alati kokku keha liikumissuunaga
Kas karussellil liikumist saab lugeda ühtlaseks (kui pole kiirendust ega pidurdamist)? See on võimatu, liikumise suund muutub pidevalt ja seega ka kiirusvektor. Arutluskäigust võime järeldada, et ühtlane liikumine on see liigub alati sirgjooneliselt! See tähendab, et ühtlase liikumise korral on tee ja nihe samad (selgitage, miks).
Pole raske ette kujutada, et ühtlase liikumise korral liigub keha võrdse aja jooksul sama kaugele.
Liikumisvektori projektsioonid
Füüsika ülesannete lahendamisel kasutatakse sageli nihkevektori projektsioone koordinaattelgedele. Nihkevektori projektsioone koordinaatide telgedele saab väljendada selle lõpu ja alguse koordinaatide erinevuste kaudu. Näiteks kui materiaalne punkt liigub punktist A punkti B, siis nihkevektor (joon. 1.3).
Valime OX-telje nii, et vektor asub selle teljega samal tasapinnal. Langetame ristid punktidest A ja B (nihkevektori algus- ja lõpp-punktist), kuni need lõikuvad OX-teljega. Seega saame punktide A ja B projektsioonid teljele X. Tähistame punktide A ja B projektsioonid vastavalt kui A x ja B x. Lõigu A x B x pikkus OX-teljel on nihkevektori projektsioon OX-teljel, see tähendab
TÄHTIS!
Tuletan meelde neile, kes matemaatikat väga hästi ei tunne: ärge ajage vektorit segi vektori projektsiooniga ühelegi teljele (näiteks S x). Vektorit tähistab alati täht või mitu tähte, mille kohal on nool. Mõnes elektroonilises dokumendis ei ole noolt paigutatud, kuna see võib tekitada raskusi elektroonilise dokumendi loomisel. Sellistel juhtudel juhinduge artikli sisust, kus tähe kõrvale võib olla kirjutatud sõna "vektor" või muul viisil, mis viitab teile, et see on vektor, mitte ainult segment.
Riis. 1.3. Nihkevektori projektsioon.
Nihkevektori projektsioon OX-teljele on võrdne vektori lõpu ja alguse koordinaatide erinevusega, st
Nihkevektori projektsioonid OY ja OZ telgedel määratakse ja kirjutatakse sarnaselt:
Siin on x 0 , y 0 , z 0 algkoordinaadid ehk keha (materiaalse punkti) lähteasendi koordinaadid; x, y, z - lõplikud koordinaadid ehk keha (materiaalse punkti) järgneva asukoha koordinaadid.
Nihkevektori projektsioon loetakse positiivseks, kui vektori suund ja koordinaattelje suund langevad kokku (nagu joonisel 1.3). Kui vektori suund ja koordinaattelje suund ei lange kokku (vastand), siis on vektori projektsioon negatiivne (joon. 1.4).
Kui nihkevektor on paralleelne teljega, siis on selle projektsiooni moodul võrdne Vektori enda mooduliga. Kui nihkevektor on teljega risti, siis on selle projektsiooni moodul võrdne nulliga (joon. 1.4).
Riis. 1.4. Liikumisvektori projektsioonimoodulid.
Mõne koguse järgnevate ja algväärtuste erinevust nimetatakse selle suuruse muutuseks. See tähendab, et nihkevektori projektsioon koordinaatide teljele on võrdne vastava koordinaadi muutusega. Näiteks juhul, kui keha liigub risti X-teljega (joonis 1.4), selgub, et keha EI LIIKU X-telje suhtes. See tähendab, et keha liikumine piki X-telge on null.
Vaatleme näidet keha liikumisest tasapinnal. Keha lähteasend on punkt A koordinaatidega x 0 ja y 0 ehk A(x 0, y 0). Keha lõppasend on punkt B koordinaatidega x ja y, see tähendab B(x, y). Leiame keha nihke mooduli.
Punktidest A ja B langetame ristid koordinaattelgedele OX ja OY (joon. 1.5).
Riis. 1.5. Keha liikumine tasapinnal.
Määrame nihkevektori projektsioonid OX ja OY telgedel:
Joonisel fig. 1.5 on selge, et kolmnurk ABC on täisnurkne kolmnurk. Sellest järeldub, et probleemi lahendamisel võib kasutada Pythagorase teoreem, mille abil saate leida nihkevektori mooduli, kuna
Pythagorase teoreemi järgi
S 2 = S x 2 + S y 2
Kust leiate nihkevektori mooduli, st keha tee pikkuse punktist A punkti B:
11) Liikumise põhilised kinemaatilised omadused: kiirus ja kiirendus
Liikuva punkti peamised kinemaatilised omadused on selle kiirus ja kiirendus, mille väärtused määratakse liikumisvõrranditest läbi esimese ja teise aja tuletise. s või alates x, y, z või alates r(vt Kiirus, Kiirendus).
Jäiga keha liikumise määramise meetodid sõltuvad tüübist ja liikumisvõrrandite arv - keha vabadusastmete arvust (vt Vabadusastmete arv) . Lihtsamad neist on jäiga keha translatsiooniline liikumine ja pöörlev liikumine. Translatsioonilise liikumise ajal liiguvad kõik keha punktid võrdselt ning selle liikumist täpsustatakse ja uuritakse samamoodi nagu ühe punkti liikumist. Pöörleva liikumise ajal ümber fikseeritud telje z (riis. 3 ) kehal on üks vabadusaste; selle asukoha määrab pöördenurk φ ja liikumisseadus on antud võrrandiga φ = f(t). Peamised kinemaatilised karakteristikud on keha nurkkiirus ω=dφ/dt ja nurkkiirendus ε = dω/dt. Suurused ω ja ε on kujutatud vektoritena, mis on suunatud piki pöörlemistelge. Teades ω ja ε, saate määrata mis tahes kehapunkti kiiruse ja kiirenduse.
Keerulisem on keha liikumine, millel on üks fikseeritud punkt ja 3 vabadusastet (näiteks güroskoop , või ülemine). Keha asend võrdlussüsteemi suhtes määratakse sel juhul umbes 3 nurga abil (näiteks Euleri nurgad: pretsessiooni, nutatsiooni ja õige pöörlemise nurgad) ning liikumisseadus määratakse võrranditega, mis väljendavad sõltuvust need nurgad õigel ajal. Peamised kinemaatilised karakteristikud on keha hetkenurkkiirus ω ja hetknurkkiirendus ε. Keha liikumine koosneb elementaarpööretest ümber hetkeliste pöörlemistelgede, mis muudavad pidevalt oma suunda. VÕI, mis läbib fikseeritud punkti KOHTA (riis. 4 ).
Kõige tavalisem juhtum on vaba jäiga keha liikumine 6 vabadusastmega. Keha asend määratakse selle ühe punkti 3 koordinaadiga, mida nimetatakse pooluseks (dünaamikaülesannetes võetakse pooluseks keha raskuskese) ja 3 nurga järgi, mis valitakse samamoodi nagu fikseeritud punktiga keha; keha liikumise seadus on antud 6 võrrandiga, mis väljendavad nimetatud koordinaatide ja nurkade sõltuvust ajast. Keha liikumine koosneb translatsioonilisest liikumisest poolusega ja pöörlevast liikumisest ümber selle pooluse, nagu ümber fikseeritud punkti. See on näiteks suurtükimürsu või vigurlendu sooritava lennuki liikumine õhus, taevakehade liikumine jne. Peamised kinemaatilised karakteristikud on liikumise translatsiooniosa kiirus ja kiirendus, mis on võrdne kiirusega pooluse kiirendus ja keha pöörlemise nurkkiirus ja nurkkiirendus pooluste ümber. Kõik need omadused (nagu ka fikseeritud punktiga keha kinemaatilised omadused) arvutatakse liikumisvõrranditest; Neid omadusi teades saate määrata keha mis tahes punkti kiiruse ja kiirenduse. Vaadeldava liikumise erijuhuks on jäiga keha tasapinnaline (või tasapinnaline) liikumine, mille puhul kõik selle punktid liiguvad paralleelselt teatud tasapinnaga. Sarnaseid liigutusi teevad paljude mehhanismide ja masinate lülid.
Kvantmehaanikas uuritakse ka punktide või kehade kompleksset liikumist ehk liikumist, mida vaadeldakse samaaegselt kahe (või enama) vastastikku liikuva tugisüsteemi suhtes. Sel juhul peetakse üht tugisüsteemist peamiseks (seda nimetatakse ka tinglikult statsionaarseks) ja selle suhtes liikuvat tugisüsteemi nimetatakse mobiilseks; üldiselt võib liikuvaid võrdlussüsteeme olla mitu.
Punkti keeruka liikumise uurimisel nimetatakse selle liikumist, aga ka kiirust ja kiirendust peamise võrdlussüsteemi suhtes tinglikult absoluutseks ja liikuva süsteemi suhtes suhteliseks. Liikuva tugiraami enda ja kõigi sellega alati seotud ruumipunktide liikumist põhisüsteemi suhtes nimetatakse teisaldatavaks liikumiseks ning selle liikuva tugiraami selle punkti kiirust ja kiirendust, millega liikuv punkt parajasti ühtib. nimetatakse kaasaskantavaks kiiruseks ja kaasaskantavaks kiirenduseks. Näiteks kui põhiline tugiraam on seotud kaldaga ja liikuv aurulaevaga, mis liigub mööda jõge, ning arvestame palli veeremist mööda auriku tekki (arvestades palli punktiks) , siis on palli kiirus ja kiirendus teki suhtes suhtelised ja kalda suhtes absoluutsed; selle tekil oleva punkti kiirus ja kiirendus, mida pall parajasti puudutab, on selle jaoks kaasaskantav. Sarnast terminoloogiat kasutatakse jäiga keha keeruka liikumise uurimisel.
12) Tavaline ja tangentsiaalne kiirendus
13) Pöörleva liikumise kinemaatika: nurkkiirus ja nurkiirendus, nende seos lineaarkiiruse ja kiirendusega
Sageli kasutatakse punkti liikumise visuaalseks kujutamiseks ristkülikukujulistel koordinaattelgedel aja funktsioonina nihke, kiiruse ja kiirenduse graafikuid.
Vaatleme ühtlase liikumise kinemaatilisi graafikuid. Olenemata sellest, kas see on sirge või kõver, on meil selle jaoks järgmised võrrandid:
Nendest võrranditest järeldub, et ühtlase liikumise nihkegraafik on sirgjoon, mis lõikab ära väärtuse ordinaatteljel s0, st punkti liikumise suurus liikumise alguses lähtepunktist (joonis a).
Kiirusgraafik on kujutatud sirgjoonega, mis on paralleelne x-teljega, kuna punkti ühtlase liikumise kiirus on konstantne väärtus v = konst(joonis b).
Vaatleme ühtlase liikumise kinemaatilisi graafikuid. Ükskõik, milline see liikumine on - sirgjooneline või kõverjooneline -, kehtivad selle jaoks järgmised võrrandid:
Ühtlaselt vahelduva liikumise nihkegraafik on kõverjooneline - paraboolne, kuna see vastab parabooli võrrandile (joonis a, b).
Ordinaatteljel on need graafikud ära lõigatud t= О väärtused, mis vastavad kaugusele liikumise alguses lähtepunktist s0.
Kiiruse graafik on kujutatud sirgjoonena, mis on kallutatud abstsisstelje suhtes (joonis c, d) ja lõikab ära ordinaatteljel (kohal t= 0) algkiiruse väärtus v0.
Ühtlaselt muutuva liikumise kiirenduse graafik on kujutatud abstsissteljega (ajateljega) paralleelse joonega - (joonis e, f.)
Ühtlaselt kiirendatud liikumisega asetame kiirenduse graafiku x-telje kohale. Ühtlaselt aeglase liikumisega – madalamale (joon. e). Ühtlaselt aeglase liikumise korral kiiruse väärtus väheneb. See on selgelt näha (joonis d). Võimalik, et kiirus väheneb nullini (punkt M joonisel fig. G). Seejärel muudab kiirus oma märki ja hakkab absoluutväärtuses kasvama. Siin toimub sisuliselt üleminek ühtlaselt aegluselt liikumiselt ühtlaselt kiirendatud liikumisele. See on täpselt see nähtus, mis esineb (joonis b, e) koos t = tA, st kui kiiruse algebraline märk muutub.
Kinemaatiliste graafikute vahel on teatav seos. Nii et ühtlase liikumise jaoks on kiirusgraafik kujutatud abstsissteljega paralleelse joonega ja kauguse graafik sirge kaldjoonega. Ühtlase liikumise korral on kiirenduse graafik x-teljega paralleelne sirgjoon, kiirusgraafik kaldjoon ja kaugusgraafik paraboolkõver. See graafikute seos tuleneb otseselt diferentsiaalseostest, mis ühendavad kiirenduse, kiiruse ja vahemaa:
Arvestades analoogiat punkti liikumisvõrrandites ja keha pöörlemisvõrrandites, saab tehnikas fundamentaalse pöörleva liikumise uurimisel kasutada graafilist tõlgendamist. Siin ilmub kauguse asemel pöördenurk, kiiruse asemel nurkkiirus, kiirenduse asemel nurkkiirendus.
14) Kaal
füüsikaline suurus, aine üks peamisi omadusi, mis määrab selle inertsiaalsed ja gravitatsioonilised omadused. Vastavalt sellele eristatakse inertset materjali ja gravitatsioonilist materjali (rasket, graviteerivat).
Magnetismi mõiste tõi mehaanikasse I. Newton. Newtoni klassikalises mehaanikas sisaldub M. keha impulsi (liikumise kvantiteedi (vt Liikumise kogus)) määratluses: impulss lk võrdeline keha kiirusega v,
lk = mv . (1)
Proportsionaalsuskoefitsient on antud keha jaoks konstantne väärtus m- ja seal on keha M.. Magnetismi ekvivalentne definitsioon saadakse klassikalise mehaanika liikumisvõrrandist
f = ma . (2)
Siin on M. kehale mõjuva jõu proportsionaalsustegur f ja sellest põhjustatud keha kiirendus a. Seostega (1) ja (2) määratletud massi nimetatakse inertsiaalseks massiks või inertsiaalseks massiks; see iseloomustab keha dünaamilisi omadusi ja on keha inertsi mõõt: konstantse jõu korral, mida suurem on keha M, seda väiksema kiirenduse see omandab, st seda aeglasemalt muutub tema liikumise olek (seda suurem on selle inerts).
Erinevatele kehadele sama jõuga mõjudes ja nende kiirendusi mõõtes on võimalik määrata nende kehade M suhtarvud: m 1 : m 2 : m 3 ... = a 1 : a 2 : a 3...; kui võtta mõõtühikuks üks M., saab leida ülejäänud kehade M..
Newtoni gravitatsiooniteoorias ilmneb magnetism erineval kujul – gravitatsioonivälja allikana. Iga keha loob gravitatsioonivälja, mis on võrdeline keha magnetismiga (ja on mõjutatud teiste kehade tekitatud gravitatsiooniväljast, mille tugevus on samuti võrdeline keha magnetismiga). See väli põhjustab mis tahes muu keha külgetõmbe selle keha külge jõuga, mis on määratud Newtoni gravitatsiooniseadusega (vt Newtoni gravitatsiooniseadust):
Kus r- kehadevaheline kaugus, G- universaalne gravitatsioonikonstant, a m 1 Ja m 2- M. kehade meelitamine. Valemist (3) on lihtne saada kaalu valem R kehamass m Maa gravitatsiooniväljas:
R = m · g . (4)
Siin g = G · M/r 2- vaba langemise kiirendus Maa gravitatsiooniväljas ja r ≈ R- Maa raadius. Seostega (3) ja (4) määratud massi nimetatakse keha gravitatsiooniliseks massiks.
M ühik GHS ühikute süsteemis on gramm ja rahvusvahelises mõõtühikute süsteemis (vt rahvusvaheline ühikute süsteem) SI on kilogramm. Aatomite ja molekulide massi mõõdetakse tavaliselt aatommassi ühikutes (vt Aatommassi ühikud). Elementaarosakeste M. väljendatakse tavaliselt kas M. elektroni ühikutes m e ehk energiaühikutes, mis näitab vastava osakese puhkeenergiat. Niisiis, M. elektron on 0,511 Mev, M. prooton - 1836,1 m e või 938,2 Mev jne.
Magnetismi olemus on kaasaegse füüsika üks olulisemaid lahendamata probleeme. Üldtunnustatud seisukoht on, et elementaarosakese magnetismi määravad sellega seotud väljad (elektromagnet-, tuuma- ja teised). Kuid matemaatika kvantitatiivset teooriat pole veel loodud. Samuti pole olemas teooriat, mis selgitaks, miks elementaarosakeste molekulid moodustavad diskreetse väärtuste spektri, veel vähem seda, mis võimaldab seda spektrit määrata.
Astrofüüsikas määrab gravitatsioonivälja tekitava keha magnetism keha nn gravitatsiooniraadiuse R gr = 2GM/c 2. Gravitatsioonilise külgetõmbe tõttu ei pääse ükski kiirgus, sealhulgas valgus, raadiusega keha pinnast kaugemale R ≤ R gr. Sellise suurusega tähed on nähtamatud; seetõttu nimetati neid "mustadeks aukudeks (vt must auk)." Sellised taevakehad peavad mängima Universumis olulist rolli.
15) Jõud
16) Newtoni seadused
Newtoni esimene seadus
On selliseid tugisüsteeme, mida nimetatakse inertsiaalseteks, mille suhtes kehad säilitavad oma kiiruse muutumatuna, kui neile ei mõju teised kehad või kompenseeritakse teiste jõudude mõju.
Newtoni II seadus
Keha kiirendus on otseselt võrdeline kehale rakendatavate resultantjõududega ja pöördvõrdeline selle massiga:
Newtoni III seadus
Jõud, millega kaks keha teineteisele mõjuvad, on suuruselt võrdsed ja vastassuunalised.
17) Newtoni seaduste kohaldatavuse piirid
Kuni eelmise sajandi lõpuni ei kahelnud keegi Newtoni seaduste absoluutses õigsuses. Kuid 20. sajandil. Selgus, et need seadused pole ikka veel absoluutselt täpsed.
Neid ei saa kasutada, kui kehad liiguvad väga suure kiirusega, mis on võrreldav valguse kiirusega. Albert Einstein, keda kutsutakse 20. sajandi Newtoniks, suutis sõnastada liikumisseadused, mis kehtivad ka valguse kiirusele lähedastel kiirustel liikumisel.
Need seadused on nn relativistliku mehaanika või relatiivsusteooria aluseks. Ja Newtoni seadused on nende seaduste tagajärg, kui kehade kiirused on valguse kiirusega võrreldes väikesed.
Newtoni seadusi ei saa rakendada, kui arvestada aatomisiseste osakeste liikumist. Selliseid liikumisi kirjeldavad kvantmehaanika seadused, milles klassikalist mehaanikat käsitletakse kui erijuhtu.
Newtoni seadustest tuletatud impulsi ja energia jäävuse seadused kehtivad nii kvantmehaanikas kui ka relatiivsusteoorias. Mehaanika on kogu loodusteaduse aluseks.
18) Hõõrdejõud
Kehade kokkupuutepunktis tekkivat jõudu, mis takistab nende suhtelist liikumist, nimetatakse hõõrdejõud. Hõõrdejõu suund on vastupidine liikumissuunale. On staatilised hõõrdejõud ja libisevad hõõrdejõud.
Kui keha libiseb mis tahes pinnal, on selle liikumine takistatud libisev hõõrdejõud.
, Kus N- maapinna reaktsioonijõud, a μ - libisemishõõrdetegur. Koefitsient μ sõltub kontaktpindade materjalist ja töötlemise kvaliteedist ning ei sõltu kehakaalust. Hõõrdetegur määratakse katseliselt.
Libmishõõrdejõud on alati suunatud keha liikumisele vastupidiselt. Kiiruse suuna muutumisel muutub ka hõõrdejõu suund.
Hõõrdejõud hakkab kehale mõjuma, kui nad üritavad seda liigutada. Kui välisjõud F vähem toodet μN, siis keha ei liigu - liikumise algust, nagu öeldakse, takistab staatilise hõõrdumise jõud . Keha hakkab liikuma alles siis, kui väline jõud Fületab staatilise hõõrdejõu maksimaalse väärtuse
Staatiline hõõrdumine - hõõrdejõud, mis takistab ühe keha liikumist teise pinnal.
Mõnel juhul on hõõrdumine kasulik (ilma hõõrdumiseta oleks maapinnal võimatu kõndida inimestel, loomadel, autodel, rongidel jne), sellistel juhtudel on hõõrdumine suurenenud. Kuid muudel juhtudel on hõõrdumine kahjulik. Näiteks kuluvad selle tõttu mehhanismide hõõrduvad osad, transpordis kulub liigne kütus jne. Seejärel võitlevad nad hõõrdumise vastu, kasutades määrdeainet (“vedelikku või õhkpatja”) või asendades libisemise veeremisega (alates veerehõõrdumine mida iseloomustavad libisevast hõõrdumisest oluliselt väiksemad jõud).
Hõõrdejõud, erinevalt gravitatsioonijõududest ja elastsusjõududest, ei sõltu kehade suhtelise asukoha koordinaatidest, need võivad sõltuda kokkupuutuvate kehade suhtelise liikumise kiirusest. Hõõrdejõud on mittepotentsiaalsed jõud.
Staatiline hõõrdejõud (υ = 0).
19) Elastne jõud
Keha deformatsiooni tagajärjel tekkivat jõudu, mis on suunatud kehaosakeste liikumisele deformatsioonil vastupidises suunas, nimetatakse elastsusjõud.
Füüsika algkursusel käsitletakse tõmbe- ja survedeformatsioone. Nendel juhtudel on elastsusjõud suunatud piki välisjõu toimejoont, s.t. piki pikisuunas deformeeruvate keermete, vedrude, varraste jms telge või risti kokkupuutuvate kehade pindadega.
Tõmbe- või survedeformatsiooni iseloomustab absoluutne pikenemine: Kus x 0- proovi esialgne pikkus, X- selle pikkus deformeerunud olekus. Keha suhtelist pikenemist nimetatakse suhteks.
Toe või vedrustuse poolt kehale mõjuvat elastsusjõudu nimetatakse maapealse reaktsiooni jõud(peatus) või vedrustuse pingutusjõud.
Hooke'i seadus: Elastsusjõud, mis tekib kehas selle tõmbe- või survedeformatsiooni ajal, on võrdeline keha absoluutse pikenemisega ja on deformatsiooni ajal suunatud kehaosakeste liikumissuunale vastupidiselt teiste osakeste suhtes:
Siin X– keha pikendamine (vedru) (m). Venivus on positiivne, kui keha on venitatud, ja negatiivne, kui see on kokku surutud.
Proportsionaalsustegur k mida nimetatakse korpuse jäikuseks, sõltub see materjalist, millest korpus on valmistatud, samuti selle geomeetrilistest mõõtmetest ja kujust. Jäikust väljendatakse njuutonites meetri kohta (N/m).
Elastsusjõud sõltub ainult antud elastse keha vastastikmõjus olevate osade vahekauguste muutustest. Elastsusjõu töö ei sõltu trajektoori kujust ja suletud trajektooril liikudes võrdub nulliga. Seetõttu on elastsusjõud potentsiaalsed jõud.
20) Gravitatsioonijõud
Gravitatsioon(universaalne gravitatsioon, gravitatsioon) on looduses põhiline vastastikmõju, millele alluvad kõik massiga kehad. Peamiselt toimib gravitatsioon kosmilisel skaalal. Tähtaeg gravitatsiooni kasutatakse ka gravitatsioonilist vastastikmõju uuriva füüsikaharu nimetusena.
Gravitatsioonikonstant
Alates (2.26) koos m 1 =m 2 =m saame
Sellest valemist on selge, et gravitatsioonikonstant on arvuliselt võrdne kahe materiaalse punkti vastastikuse gravitatsioonijõuga, mille mass on võrdne ühe massiühikuga ja mis asuvad üksteisest ühe pikkuseühiku kaugusel.
Gravitatsioonikonstandi arvväärtus määratakse katseliselt. Seda tegi esmakordselt inglise teadlane Cavendish, kasutades väändünamomeetrit (torsional balance).
SI-s on gravitatsioonikonstant oluline
G = 6,67·10 -11 Nm 2 /kg 2.
Järelikult tõmbuvad kaks teineteisest 1 m kaugusel asuvat materiaalset punkti, mis kaaluvad kumbki 1 kg, vastastikku gravitatsioonijõuga, mis on võrdne 6,67 ± 10–11 N.
21) Gravitatsiooni seadus
1687. aastal kehtestas Newton ühe mehaanika põhiseaduse, nn universaalse gravitatsiooni seadus: mis tahes kaks materjaliosakest tõmbuvad teineteise poole jõuga, mis on võrdeline nende masside korrutisega ja pöördvõrdeline nendevahelise kauguse ruuduga.
Seda jõudu nimetatakse gravitatsioonijõuks (või gravitatsioonijõuks).
Klass: 9
Tunni eesmärgid:
- Hariduslik:
– tutvustada mõisteid „liikumine“, „tee“, „trajektoor“. - Arenguline:
– arendada loogilist mõtlemist, korrektset kehalist kõnet ja kasutada sobivat terminoloogiat. - Hariduslik:
– saavutada õpilaste kõrgetasemeline aktiivsus, tähelepanu ja keskendumisvõime.
Varustus:
- plastpudel mahuga 0,33 liitrit vee ja kaaluga;
- meditsiiniline pudel mahuga 10 ml (või väike katseklaas) koos skaalaga.
Demonstratsioonid: nihke ja läbitud vahemaa määramine.
Tundide ajal
1. Teadmiste värskendamine.
- Tere kutid! Istu maha! Täna jätkame teema “Kehade vastasmõju ja liikumise seadused” uurimist ning tunnis tutvume kolme uue selle teemaga seotud mõistega (terminiga). Vahepeal kontrollime teie selle õppetunni kodutööd.
2. Kodutööde kontrollimine.
Enne tundi kirjutab üks õpilane tahvlile järgmise koduse ülesande lahenduse:
Kahele õpilasele antakse kaardid individuaalsete ülesannetega, mis sooritatakse suulise testi käigus nt. Õpiku 1 lk 9.
1. Milline koordinaatsüsteem (ühemõõtmeline, kahemõõtmeline, kolmemõõtmeline) tuleks valida kehade asukoha määramiseks:
a) traktor põllul;
b) helikopter taevas;
c) rong
d) malenupp laual.
2. Arvestades avaldist: S = υ 0 t + (a t 2) / 2, väljendage: a, υ 0
1. Milline koordinaatsüsteem (ühemõõtmeline, kahemõõtmeline, kolmemõõtmeline) tuleks valida selliste kehade asukoha määramiseks:
a) lühter toas;
b) lift;
c) allveelaev;
d) lennuk rajal.
2. Antud avaldis: S = (υ 2 – υ 0 2) / 2 · a, väljenda: υ 2, υ 0 2.
3. Uue teoreetilise materjali uurimine.
Keha koordinaatide muutustega on seotud liikumist kirjeldav kogus - LIIKUMINE.
Keha (materiaalse punkti) nihkumine on vektor, mis ühendab keha algset asendit selle järgneva asendiga.
Liikumist tähistatakse tavaliselt tähega . SI-s mõõdetakse nihet meetrites (m).
– [m] – meeter.
Nihe – suurusjärk vektor, need. Lisaks numbrilisele väärtusele on sellel ka suund. Vektori suurus on esitatud kujul segment, mis algab teatud punktist ja lõpeb suunda näitava punktiga. Sellist noolelõiku nimetatakse vektor.
 – vektor, mis on tõmmatud punktist M punkti M 1
– vektor, mis on tõmmatud punktist M punkti M 1 Nihkevektori tundmine tähendab selle suuna ja suuruse teadmist. Vektori moodul on skalaar, s.o. numbriline väärtus. Teades keha algset asukohta ja liikumisvektorit, saate määrata, kus keha asub.
Liikumise käigus hõivab materiaalne punkt ruumis valitud võrdlussüsteemi suhtes erinevaid positsioone. Sel juhul "kirjeldab" liikuv punkt mõnda joont ruumis. Mõnikord on see joon nähtav – näiteks võib kõrgelt lendav lennuk jätta taevasse jälje. Tuntum näide on tahvlil olev kriiditüki märk.
Nimetatakse mõttelist joont ruumis, mida mööda keha liigub TRAJEKTOOR keha liigutused.
Keha trajektoor on pidev joon, mida kirjeldab liikuv keha (mida peetakse materiaalseks punktiks) valitud tugisüsteemi suhtes.

Liikumine, milles kõik punktid keha kaasa liikudes sama trajektoorid, kutsus progressiivne.
Väga sageli on trajektoor nähtamatu joon. Trajektoor liikuv punkt võib olla otse või kõverad rida. Trajektoori kuju järgi liikumine Juhtub otsekohene Ja kõverjooneline.


Tee pikkus on PATH. Tee on skalaarsuurus ja seda tähistatakse tähega l. Tee suureneb, kui keha liigub. Ja jääb muutumatuks, kui keha on puhkeasendis. Seega tee ei saa aja jooksul väheneda.
Nihkemoodul ja tee saavad väärtuselt kokku langeda ainult siis, kui keha liigub mööda sirgjoont samas suunas.
Mis vahe on teel ja liikumisel? Neid kahte mõistet aetakse sageli segamini, kuigi tegelikult on need üksteisest väga erinevad. Vaatame neid erinevusi: ( 3. lisa) (jagatakse kaartidena igale õpilasele)
- Teekond on skalaarne suurus ja seda iseloomustab ainult arvväärtus.
- Nihe on vektorsuurus ja seda iseloomustavad nii arvväärtus (moodul) kui ka suund.
- Kui keha liigub, saab tee ainult suureneda ja nihkemoodul võib nii suureneda kui ka väheneda.
- Kui keha pöördub tagasi alguspunkti, on selle nihe null, kuid tee ei ole null.
| Tee | Liikumine | |
| Definitsioon | Keha poolt kirjeldatud trajektoori pikkus teatud aja jooksul | Vektor, mis ühendab keha algset asendit selle järgneva asendiga |
| Määramine | l [m] | S [m] |
| Füüsikaliste suuruste olemus | Skalaarne, st. määrab ainult arvväärtus | Vektor, st. määratakse arvväärtuse (mooduli) ja suuna järgi |
| Sissejuhatuse vajadus | Teades keha algset asukohta ja aja t jooksul läbitud teed l, on võimatu määrata keha asukohta antud ajahetkel t. | Teades keha ja S algset asendit ajavahemikul t, on keha asukoht antud ajahetkel t üheselt määratud |
| l = S sirgjoonelise liikumise korral ilma tagasipöördumisteta | ||
4. Kogemuste demonstreerimine (õpilased esinevad iseseisvalt omal kohal laua taga, õpetaja koos õpilastega demonstreerib seda kogemust)
- Täitke kaaluga plastpudel kaelani veega.
- Täitke skaalaga pudel veega 1/5 mahust.
- Kallutage pudelit nii, et vesi tuleks kuni kaelani, kuid ei voola pudelist välja.
- Langetage veepudel kiiresti pudelisse (korgiga sulgemata), et pudelikael satuks pudeli vette. Pudel hõljub pudelis oleva vee pinnal. Osa veest valgub pudelist välja.
- Keerake pudeli kork peale.
- Suruge pudeli külgi ja langetage ujuk pudeli põhja.

- Vabastades surve pudeli seintele, pange ujuk pinnale hõljuma. Määrake ujuki tee ja liikumine:___________________________________________________________________
- Langetage ujuk pudeli põhja. Määrake ujuki tee ja liikumine:_____________________________________________________________________________________
- Pange ujuk hõljuma ja vajuma. Milline on sel juhul ujuki tee ja liikumine?____________________________________________________________________________________________
5. Harjutused ja küsimused ülevaatamiseks.
- Kas taksoga reisides maksame reisi või transpordi eest? (Tee)
- Pall kukkus 3 m kõrguselt, põrkas põrandast ja jäi kinni 1 m kõrguselt Leia palli tee ja liikumine. (Rada – 4 m, liikumine – 2 m.)
6. Tunni kokkuvõte.
Tunni kontseptsioonide ülevaade:
- liikumine;
– trajektoor;
- tee.
7. Kodutöö.
Õpiku § 2, küsimused pärast lõiku, õpiku harjutus 2 (lk 12), korrake tunnikogemust kodus.
Bibliograafia
1. Peryshkin A.V., Gutnik E.M.. Füüsika. 9. klass: õpik üldharidusasutustele - 9. trükk, stereotüüp. – M.: Bustard, 2005.
Kinemaatikas kasutatakse erinevate suuruste leidmiseks matemaatilisi meetodeid. Eelkõige tuleb nihkevektori suuruse leidmiseks rakendada vektori algebra valemit. See sisaldab vektori algus- ja lõpp-punkti koordinaate, st. keha esialgne ja lõplik asend.
Juhised
Liikumise ajal muudab materiaalne keha oma asukohta ruumis. Selle trajektoor võib olla sirge või suvaline; selle pikkus on keha teekond, kuid mitte vahemaa, mille kaudu see on liikunud. Need kaks suurust langevad kokku ainult sirgjoonelise liikumise korral.
Niisiis, las keha liigub punktist A (x0, y0) punkti B (x, y). Nihkevektori suuruse leidmiseks tuleb arvutada vektori AB pikkus. Joonistage koordinaatteljed ja märkige neile keha A ja B alg- ja lõppasendi teadaolevad punktid.
Joonistage joon punktist A punkti B, märkige suund. Langetage selle otste projektsioonid teljele ja kandke graafikule vaadeldavaid punkte läbivad paralleelsed ja võrdsed lõigud. Näete, et joonisel on kujutatud projektsiooni külgede ja hüpotenuusi nihkega täisnurkne kolmnurk.
Leia Pythagorase teoreemi abil hüpotenuusi pikkus. Seda meetodit kasutatakse laialdaselt vektoralgebras ja seda nimetatakse kolmnurga reegliks. Kõigepealt kirjutage üles jalgade pikkused, need on võrdsed punktide A ja B vastavate abstsisside ja ordinaatide erinevustega:
ABx = x – x0 – vektori projektsioon Ox-teljele;
ABy = y – y0 – selle projektsioon Oy teljele.
Defineerige nihe |AB|:
|AB| = ?(ABx? + ABy?) = ((x – x0)? + (y – y0)?).
Kolmemõõtmelise ruumi jaoks lisage valemile kolmas koordinaat - rakendage z:
|AB| = ?(ABx? + ABy? + ABz?) = ((x – x0)? + (y – y0)? + (z – z0)?).
Saadud valemit saab rakendada mis tahes trajektoori ja liikumisviisi jaoks. Sel juhul on nihke suurusel oluline omadus. See on alati väiksem või võrdne tee pikkusega, üldjuhul ei lange selle joon trajektoorikõveraga kokku. Projektsioonid on matemaatilised suurused, mis võivad olla nullist suuremad või väiksemad. Sellel pole aga tähtsust, kuna nad osalevad arvutamisel ühtlaselt.
 Nikolai Martõnov, kes tappis M duellis
Nikolai Martõnov, kes tappis M duellis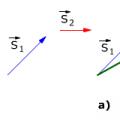 Nihkevektori projektsioonid Keha nihke moodul ajas
Nihkevektori projektsioonid Keha nihke moodul ajas Sirge võrrand - sirge võrrandi tüübid: punkti läbiv, üldine, kanooniline, parameetriline jne.
Sirge võrrand - sirge võrrandi tüübid: punkti läbiv, üldine, kanooniline, parameetriline jne.