What forces act on the movement of a mathematical pendulum. Secrets of the pendulum
Mathematical pendulum called a material point suspended on a weightless and inextensible thread attached to a suspension and located in the field of gravity (or other force).
We study the oscillations of a mathematical pendulum in an inertial frame of reference, relative to which the point of its suspension is at rest or moves uniformly in a straight line. We will neglect the force of air resistance (an ideal mathematical pendulum). Initially, the pendulum is at rest in the equilibrium position C. In this case, the force of gravity acting on it and the force of elasticity F?ynp of the thread are mutually compensated.
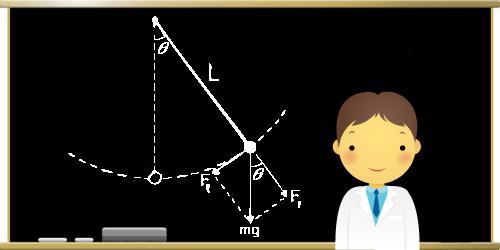
We bring the pendulum out of the equilibrium position (deflecting it, for example, to position A) and let it go without initial velocity (Fig. 1). In this case, the forces and do not balance each other. The tangential component of gravity, acting on the pendulum, gives it a tangential acceleration a?? (the component of the total acceleration directed along the tangent to the trajectory of the mathematical pendulum), and the pendulum begins to move towards the equilibrium position with an increasing speed in absolute value. The tangential component of gravity is thus the restoring force. The normal component of gravity is directed along the thread against the elastic force. The resultant force and tells the pendulum normal acceleration, which changes the direction of the velocity vector, and the pendulum moves along the arc ABCD.

The closer the pendulum approaches the equilibrium position C, the smaller the value of the tangential component becomes. In the equilibrium position, it is equal to zero, and the speed reaches its maximum value, and the pendulum moves further by inertia, rising upward along the arc. In this case, the component is directed against the speed. With an increase in the angle of deflection a, the modulus of force increases, and the modulus of velocity decreases, and at point D the speed of the pendulum becomes equal to zero. The pendulum stops for a moment and then begins to move in the opposite direction to the equilibrium position. Having again passed it by inertia, the pendulum, slowing down, will reach point A (no friction), i.e. makes a full swing. After that, the movement of the pendulum will be repeated in the sequence already described.
We obtain an equation describing the free oscillations of a mathematical pendulum.
Let the pendulum at a given moment of time be at point B. Its displacement S from the equilibrium position at this moment is equal to the length of the arc CB (i.e. S = |CB|). Let us denote the length of the suspension thread as l, and the mass of the pendulum as m.
Figure 1 shows that , where . At small angles () pendulum deflection, therefore
The minus sign in this formula is put because the tangential component of gravity is directed towards the equilibrium position, and the displacement is counted from the equilibrium position.
According to Newton's second law. We project the vector quantities of this equation onto the direction of the tangent to the trajectory of the mathematical pendulum
From these equations we get
Dynamic equation of motion of a mathematical pendulum. The tangential acceleration of a mathematical pendulum is proportional to its displacement and is directed towards the equilibrium position. This equation can be written as
![]()
Comparing it with the equation of harmonic oscillations ![]() , we can conclude that the mathematical pendulum makes harmonic oscillations. And since the considered oscillations of the pendulum occurred under the action of only internal forces, these were free oscillations of the pendulum. Consequently, free oscillations of a mathematical pendulum with small deviations are harmonic.
, we can conclude that the mathematical pendulum makes harmonic oscillations. And since the considered oscillations of the pendulum occurred under the action of only internal forces, these were free oscillations of the pendulum. Consequently, free oscillations of a mathematical pendulum with small deviations are harmonic.
Denote
![]()
Cyclic frequency of pendulum oscillations.
The period of oscillation of the pendulum. Hence,
This expression is called the Huygens formula. It determines the period of free oscillations of the mathematical pendulum. It follows from the formula that at small angles of deviation from the equilibrium position, the oscillation period of the mathematical pendulum:
- does not depend on its mass and amplitude of oscillations;
- proportional to the square root of the length of the pendulum and inversely proportional to the square root of the free fall acceleration.
This is consistent with the experimental laws of small oscillations of a mathematical pendulum, which were discovered by G. Galileo.
We emphasize that this formula can be used to calculate the period when two conditions are met simultaneously:
- pendulum oscillations should be small;
- the suspension point of the pendulum must be at rest or move uniformly rectilinearly relative to the inertial reference frame in which it is located.
If the suspension point of a mathematical pendulum moves with acceleration, then the tension force of the thread changes, which leads to a change in the restoring force, and, consequently, the frequency and period of oscillation. As calculations show, the period of oscillation of the pendulum in this case can be calculated by the formula
where is the "effective" acceleration of the pendulum in a non-inertial frame of reference. It is equal to the geometric sum of the gravitational acceleration and the vector opposite to the vector , i.e. it can be calculated using the formula
A mechanical system, which consists of a material point (body) hanging on an inextensible weightless thread (its mass is negligible compared to the weight of the body) in a uniform gravity field, is called a mathematical pendulum (another name is an oscillator). There are other types of this device. Instead of a thread, a weightless rod can be used. A mathematical pendulum can clearly reveal the essence of many interesting phenomena. With a small amplitude of oscillation, its movement is called harmonic.
General information about the mechanical system
The formula for the period of oscillation of this pendulum was derived by the Dutch scientist Huygens (1629-1695). This contemporary of I. Newton was very fond of this mechanical system. In 1656 he created the first pendulum clock. They measured time with exceptional accuracy for those times. This invention became the most important stage in the development of physical experiments and practical activities.
If the pendulum is in the equilibrium position (hanging vertically), then it will be balanced by the force of the thread tension. A flat pendulum on an inextensible thread is a system with two degrees of freedom with a connection. When you change just one component, the characteristics of all its parts change. So, if the thread is replaced by a rod, then this mechanical system will have only 1 degree of freedom. What are the properties of a mathematical pendulum? In this simplest system, chaos arises under the influence of a periodic perturbation. In the case when the suspension point does not move, but oscillates, the pendulum has a new equilibrium position. With rapid up and down oscillations, this mechanical system acquires a stable upside down position. She also has her own name. It is called the pendulum of Kapitza.
pendulum properties

The mathematical pendulum has very interesting properties. All of them are confirmed by known physical laws. The period of oscillation of any other pendulum depends on various circumstances, such as the size and shape of the body, the distance between the point of suspension and the center of gravity, the distribution of mass relative to this point. That is why determining the period of a hanging body is a rather difficult task. It is much easier to calculate the period of a mathematical pendulum, the formula of which will be given below. As a result of observations of similar mechanical systems, the following regularities can be established:
If, while maintaining the same length of the pendulum, different weights are suspended, then the period of their oscillations will turn out to be the same, although their masses will differ greatly. Therefore, the period of such a pendulum does not depend on the mass of the load.
If, when starting the system, the pendulum is deflected by not too large, but different angles, then it will begin to oscillate with the same period, but with different amplitudes. As long as the deviations from the center of equilibrium are not too large, the oscillations in their form will be quite close to harmonic ones. The period of such a pendulum does not depend on the oscillation amplitude in any way. This property of this mechanical system is called isochronism (translated from the Greek "chronos" - time, "isos" - equal).
The period of the mathematical pendulum
This indicator represents the period Despite the complex wording, the process itself is very simple. If the length of the thread of a mathematical pendulum is L, and the free fall acceleration is g, then this value is equal to:
The period of small natural oscillations in no way depends on the mass of the pendulum and the amplitude of oscillations. In this case, the pendulum moves like a mathematical pendulum with a reduced length.
Oscillations of a mathematical pendulum

A mathematical pendulum oscillates, which can be described by a simple differential equation:
x + ω2 sin x = 0,
where x (t) is an unknown function (this is the angle of deviation from the lower equilibrium position at time t, expressed in radians); ω is a positive constant that is determined from the parameters of the pendulum (ω = √g/L, where g is the gravitational acceleration and L is the length of the mathematical pendulum (suspension).
The equation of small oscillations near the equilibrium position (harmonic equation) looks like this:
x + ω2 sin x = 0
Oscillatory movements of the pendulum
A mathematical pendulum, which makes small oscillations, moves along a sinusoid. The second-order differential equation meets all the requirements and parameters of such a motion. To determine the trajectory, you must specify the speed and coordinate, from which independent constants are then determined:
x \u003d A sin (θ 0 + ωt),
where θ 0 is the initial phase, A is the oscillation amplitude, ω is the cyclic frequency determined from the equation of motion.
Mathematical pendulum (formulas for large amplitudes)
This mechanical system, which makes its oscillations with a significant amplitude, is subject to more complex laws of motion. For such a pendulum, they are calculated by the formula:
sin x/2 = u * sn(ωt/u),
where sn is the Jacobian sine, which for u< 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
where ε = E/mL2 (mL2 is the energy of the pendulum).
The oscillation period of a non-linear pendulum is determined by the formula:
where Ω = π/2 * ω/2K(u), K is the elliptic integral, π - 3,14.

The movement of the pendulum along the separatrix
A separatrix is a trajectory of a dynamical system that has a two-dimensional phase space. The mathematical pendulum moves along it non-periodically. At an infinitely distant moment of time, it falls from the extreme upper position to the side with zero velocity, then gradually picks it up. It eventually stops, returning to its original position.
If the amplitude of the pendulum's oscillation approaches the number π , this indicates that the motion on the phase plane approaches the separatrix. In this case, under the action of a small driving periodic force, the mechanical system exhibits chaotic behavior.
When the mathematical pendulum deviates from the equilibrium position with a certain angle φ, a tangential force of gravity Fτ = -mg sin φ arises. The minus sign means that this tangential component is directed in the opposite direction from the pendulum deflection. When the displacement of the pendulum along the arc of a circle with radius L is denoted by x, its angular displacement is equal to φ = x/L. The second law, which is for projections and force, will give the desired value:
mg τ = Fτ = -mg sinx/L
Based on this relationship, it can be seen that this pendulum is a non-linear system, since the force that tends to return it to its equilibrium position is always proportional not to the displacement x, but to sin x/L.
Only when the mathematical pendulum makes small oscillations is it a harmonic oscillator. In other words, it becomes a mechanical system capable of performing harmonic vibrations. This approximation is practically valid for angles of 15-20°. Pendulum oscillations with large amplitudes are not harmonic.
Newton's law for small oscillations of a pendulum

If a given mechanical system performs small vibrations, Newton's 2nd law will look like this:
mg τ = Fτ = -m* g/L* x.
Based on this, we can conclude that the mathematical pendulum is proportional to its displacement with a minus sign. This is the condition due to which the system becomes a harmonic oscillator. The modulus of the proportionality factor between displacement and acceleration is equal to the square of the circular frequency:
ω02 = g/L; ω0 = √g/L.
This formula reflects the natural frequency of small oscillations of this type of pendulum. Based on this,
T = 2π/ ω0 = 2π√ g/L.
Calculations based on the law of conservation of energy
The properties of a pendulum can also be described using the law of conservation of energy. In this case, it should be taken into account that the pendulum in the field of gravity is equal to:
E = mg∆h = mgL(1 - cos α) = mgL2sin2 α/2
Total equals kinetic or maximum potential: Epmax = Ekmsx = E
After the law of conservation of energy is written, the derivative of the right and left sides of the equation is taken:
Since the derivative of constants is 0, then (Ep + Ek)" = 0. The derivative of the sum is equal to the sum of the derivatives:
Ep" = (mg/L*x2/2)" = mg/2L*2x*x" = mg/L*v + Ek" = (mv2/2) = m/2(v2)" = m/2* 2v*v" = mv*α,
hence:
Mg/L*xv + mva = v (mg/L*x + mα) = 0.
Based on the last formula, we find: α = - g/L*x.
Practical application of the mathematical pendulum
Acceleration varies with geographic latitude, since the density of the earth's crust is not the same throughout the planet. Where rocks with a higher density occur, it will be somewhat higher. The acceleration of a mathematical pendulum is often used for geological exploration. It is used to search for various minerals. Simply by counting the number of swings of the pendulum, you can find coal or ore in the bowels of the Earth. This is due to the fact that such fossils have a density and mass greater than the loose rocks underlying them.

The mathematical pendulum was used by such prominent scientists as Socrates, Aristotle, Plato, Plutarch, Archimedes. Many of them believed that this mechanical system could influence the fate and life of a person. Archimedes used a mathematical pendulum in his calculations. Nowadays, many occultists and psychics use this mechanical system to fulfill their prophecies or search for missing people.
The famous French astronomer and naturalist C. Flammarion also used a mathematical pendulum for his research. He claimed that with his help he was able to predict the discovery of a new planet, the appearance of the Tunguska meteorite and other important events. During the Second World War in Germany (Berlin) a specialized pendulum institute worked. Today, the Munich Institute of Parapsychology is engaged in similar research. The employees of this institution call their work with the pendulum “radiesthesia”.
Mathematical pendulum- this is a material point suspended on a weightless and inextensible thread located in the Earth's gravity field. A mathematical pendulum is an idealized model that correctly describes a real pendulum only under certain conditions. A real pendulum can be considered mathematical if the length of the thread is much greater than the dimensions of the body suspended on it, the mass of the thread is negligible compared to the mass of the body, and the deformations of the thread are so small that they can be neglected altogether.
The oscillating system in this case is formed by a thread, a body attached to it, and the Earth, without which this system could not serve as a pendulum.
where a X – acceleration, g - acceleration of gravity, X- offset, l is the length of the pendulum string.
This equation is called the equation of free oscillations of a mathematical pendulum. It correctly describes the oscillations under consideration only when the following assumptions are fulfilled:
2) only small oscillations of a pendulum with a small swing angle are considered.
Free vibrations of any systems in all cases are described by similar equations.
The reasons for the free oscillations of a mathematical pendulum are:
1. The action on the pendulum of the force of tension and the force of gravity, preventing its displacement from the equilibrium position and forcing it to fall again.
2. The inertia of the pendulum, due to which, while maintaining its speed, it does not stop in the equilibrium position, but passes through it further.
The period of free oscillations of a mathematical pendulum
The period of free oscillations of a mathematical pendulum does not depend on its mass, but is determined only by the length of the thread and the free fall acceleration in the place where the pendulum is located.
Energy conversion during harmonic vibrations
With harmonic oscillations of a spring pendulum, the potential energy of an elastically deformed body is converted into its kinetic energy, where k – elasticity coefficient, X - pendulum displacement module from the equilibrium position, m- the mass of the pendulum, v- his speed. In accordance with the equation of harmonic oscillations:
![]() ,
,
![]() .
.
The total energy of the spring pendulum:
![]() .
.
Total energy for a mathematical pendulum:
![]()
In the case of a mathematical pendulum
Energy transformations during oscillations of a spring pendulum occur in accordance with the law of conservation of mechanical energy ( ![]() ). When the pendulum moves up or down from the equilibrium position, its potential energy increases, and its kinetic energy decreases. When the pendulum passes the equilibrium position ( X= 0), its potential energy is equal to zero and the kinetic energy of the pendulum has the largest value, equal to its total energy.
). When the pendulum moves up or down from the equilibrium position, its potential energy increases, and its kinetic energy decreases. When the pendulum passes the equilibrium position ( X= 0), its potential energy is equal to zero and the kinetic energy of the pendulum has the largest value, equal to its total energy.
Thus, in the process of free oscillations of the pendulum, its potential energy is converted into kinetic, kinetic into potential, potential then again into kinetic, etc. But the total mechanical energy remains unchanged.
Forced vibrations. Resonance.
Oscillations that occur under the action of an external periodic force are called forced vibrations. An external periodic force, called a driving force, imparts additional energy to the oscillatory system, which is used to replenish energy losses due to friction. If the driving force changes in time according to the sine or cosine law, then the forced oscillations will be harmonic and undamped.
Unlike free oscillations, when the system receives energy only once (when the system is taken out of equilibrium), in the case of forced oscillations, the system continuously absorbs this energy from a source of external periodic force. This energy compensates for the losses spent on overcoming friction, and therefore the total energy of the oscillatory system no remains unchanged.
The frequency of forced oscillations is equal to the frequency of the driving force. When the frequency of the driving force υ coincides with the natural frequency of the oscillatory system υ 0 , there is a sharp increase in the amplitude of forced oscillations - resonance. Resonance occurs because υ = υ 0 the external force, acting in time with free vibrations, is always co-directed with the speed of the oscillating body and does positive work: the energy of the oscillating body increases, and the amplitude of its oscillations becomes large. Graph of the dependence of the amplitude of forced oscillations BUT t on the frequency of the driving force υ shown in the figure, this graph is called the resonance curve:

The phenomenon of resonance plays an important role in a number of natural, scientific and industrial processes. For example, it is necessary to take into account the phenomenon of resonance when designing bridges, buildings and other structures that experience vibration under load, otherwise, under certain conditions, these structures can be destroyed.
The pendulums shown in fig. 2, are extended bodies of various shapes and sizes, oscillating around a suspension or support point. Such systems are called physical pendulums. In a state of equilibrium, when the center of gravity is on the vertical below the point of suspension (or support), the force of gravity is balanced (through the elastic forces of the deformed pendulum) by the reaction of the support. When deviating from the equilibrium position, gravity and elastic forces determine at each moment of time the angular acceleration of the pendulum, i.e., determine the nature of its movement (oscillation). We will now consider the dynamics of oscillations in more detail using the simplest example of the so-called mathematical pendulum, which is a small weight suspended on a long thin thread.
In a mathematical pendulum, we can neglect the mass of the thread and the deformation of the weight, i.e., we can assume that the mass of the pendulum is concentrated in the weight, and the elastic forces are concentrated in the thread, which is considered inextensible. Let us now look under the influence of what forces our pendulum oscillates after it is brought out of equilibrium in some way (by push, deflection).
When the pendulum is at rest in the equilibrium position, the force of gravity acting on its weight and directed vertically downwards is balanced by the tension in the thread. In the deflected position (Fig. 15), gravity acts at an angle to the tension force directed along the thread. We decompose the force of gravity into two components: in the direction of the thread () and perpendicular to it (). When the pendulum oscillates, the tension force of the thread slightly exceeds the component - by the value of the centripetal force, which causes the load to move in an arc. The component is always directed towards the equilibrium position; she seems to be striving to restore this position. Therefore, it is often called the restoring force. The modulus is greater, the more the pendulum is deflected.

Rice. 15. The restoring force when the pendulum deviates from the equilibrium position
So, as soon as the pendulum, during its oscillations, begins to deviate from the equilibrium position, say, to the right, a force appears that slows down its movement the more, the farther it is deflected. Ultimately, this force will stop him and drag him back to the equilibrium position. However, as we approach this position, the force will become less and less and in the equilibrium position itself will turn to zero. Thus, the pendulum passes through the equilibrium position by inertia. As soon as it begins to deviate to the left, a force will again appear, growing with an increase in the deviation, but now directed to the right. The movement to the left will again slow down, then the pendulum will stop for a moment, after which the accelerated movement to the right will begin, etc.
What happens to the energy of a pendulum as it swings?
Twice during the period - at the largest deviations to the left and to the right - the pendulum stops, that is, at these moments the speed is zero, which means that the kinetic energy is also zero. But it is precisely at these moments that the center of gravity of the pendulum is raised to the greatest height and, consequently, the potential energy is greatest. On the contrary, at the moments of passage through the equilibrium position, the potential energy is the smallest, and the speed and kinetic energy reach the maximum value.
We assume that the forces of friction of the pendulum on the air and the friction at the point of suspension can be neglected. Then, according to the law of conservation of energy, this maximum kinetic energy is exactly equal to the excess of potential energy in the position of greatest deviation over the potential energy in the equilibrium position.
So, when the pendulum oscillates, a periodic transition of kinetic energy into potential energy and vice versa occurs, and the period of this process is half as long as the period of oscillation of the pendulum itself. However, the total energy of the pendulum (the sum of potential and kinetic energies) is constant all the time. It is equal to the energy that was imparted to the pendulum at the start, whether it is in the form of potential energy (initial deflection) or kinetic energy (initial push).
This is the case for all vibrations in the absence of friction or any other processes that take energy from the oscillating system or impart energy to it. That is why the amplitude remains unchanged and is determined by the initial deviation or the force of the push.
We get the same changes in the restoring force and the same transition of energy if, instead of hanging the ball on a thread, we make it roll in a vertical plane in a spherical cup or in a trough curved around the circumference. In this case, the role of the thread tension will be assumed by the pressure of the walls of the cup or trough (again, we neglect the friction of the ball against the walls and air).
A mathematical pendulum is a model of an ordinary pendulum. A mathematical pendulum is a material point that is suspended on a long weightless and inextensible thread.
Bring the ball out of equilibrium and release it. There are two forces acting on the ball: gravity and tension in the string. When the pendulum moves, the force of air friction will still act on it. But we will consider it very small.
Let us decompose the force of gravity into two components: the force directed along the thread, and the force directed perpendicular to the tangent to the trajectory of the ball.
These two forces add up to gravity. The elastic forces of the thread and the component of gravity Fn impart centripetal acceleration to the ball. The work of these forces will be equal to zero, and therefore they will only change the direction of the velocity vector. At any given time, it will be tangent to the arc of the circle.
Under the action of the gravity component Fτ, the ball will move along the arc of a circle with a speed increasing in absolute value. The value of this force always changes in absolute value; when passing through the equilibrium position, it is equal to zero.
Dynamics of oscillatory motion
The equation of motion of a body oscillating under the action of an elastic force.
General equation of motion:
Oscillations in the system occur under the action of the elastic force, which, according to Hooke's law, is directly proportional to the displacement of the load
Then the equation of motion of the ball will take the following form:
Divide this equation by m, we get the following formula:
And since the mass and coefficient of elasticity are constant values, then the ratio (-k / m) will also be constant. We have obtained an equation that describes the vibrations of a body under the action of an elastic force.
The projection of the acceleration of the body will be directly proportional to its coordinate, taken with the opposite sign.
The equation of motion of a mathematical pendulum
The equation of motion of a mathematical pendulum is described by the following formula:
This equation has the same form as the equation for the movement of a load on a spring. Consequently, the oscillations of the pendulum and the movement of the ball on the spring occur in the same way.
The displacement of the ball on the spring and the displacement of the pendulum body from the equilibrium position change with time according to the same laws.
 Two heads and six legs; four walk, and two lie still
Two heads and six legs; four walk, and two lie still Self-esteem - what is it: concept, structure, types and levels
Self-esteem - what is it: concept, structure, types and levels Cassandra's Path, or Pasta Adventures War on Earth and Underground
Cassandra's Path, or Pasta Adventures War on Earth and Underground