What systems of linear equations are called quadratic. Systems of linear equations: basic concepts
System of linear algebraic equations. Basic terms. Matrix notation.
Definition of a system of linear algebraic equations. System solution. Classification of systems.
Under system of linear algebraic equations(SLAE) imply a system
The parameters aij are called coefficients, and bi free members SLAU. Sometimes, to emphasize the number of equations and unknowns, they say “m × n system of linear equations”, thereby indicating that the SLAE contains m equations and n unknowns.
If all free terms bi=0 then SLAE is called homogeneous. If among the free members there is at least one other than zero, the SLAE is called heterogeneous.
SLAU decision(1) any ordered collection of numbers is called (α1,α2,…,αn) if the elements of this collection, substituted in a given order for the unknowns x1,x2,…,xn, turn each SLAE equation into an identity.
Any homogeneous SLAE has at least one solution: zero(in a different terminology - trivial), i.e. x1=x2=…=xn=0.
If SLAE (1) has at least one solution, it is called joint if there are no solutions, incompatible. If a joint SLAE has exactly one solution, it is called certain, if there are an infinite number of solutions - uncertain.

Matrix form of writing systems of linear algebraic equations.
Several matrices can be associated with each SLAE; moreover, the SLAE itself can be written as a matrix equation. For SLAE (1), consider the following matrices:

The matrix A is called system matrix. The elements of this matrix are the coefficients of the given SLAE.
The matrix A˜ is called expanded matrix system. It is obtained by adding to the system matrix a column containing free members b1,b2,...,bm. Usually this column is separated by a vertical line, for clarity.
The column matrix B is called matrix of free members, and the column matrix X is matrix of unknowns.
Using the notation introduced above, SLAE (1) can be written in the form of a matrix equation: A⋅X=B.
Note
The matrices associated with the system can be written in various ways: everything depends on the order of the variables and equations of the considered SLAE. But in any case, the order of the unknowns in each equation of a given SLAE must be the same
The Kronecker-Capelli theorem. Investigation of systems of linear equations for compatibility.
Kronecker-Capelli theorem
A system of linear algebraic equations is consistent if and only if the rank of the matrix of the system is equal to the rank of the extended matrix of the system, i.e. rankA=rankA˜.
A system is called consistent if it has at least one solution. The Kronecker-Capelli theorem says this: if rangA=rangA˜, then there is a solution; if rangA≠rangA˜, then this SLAE has no solutions (inconsistent). The answer to the question about the number of these solutions is given by a corollary of the Kronecker-Capelli theorem. In the formulation of the corollary, the letter n is used, which is equal to the number of variables of the given SLAE.
Corollary from the Kronecker-Capelli theorem
If rangA≠rangA˜, then the SLAE is inconsistent (has no solutions).
If rankA=rankA˜ If rangA=rangA˜=n, then the SLAE is definite (it has exactly one solution).
Note that the formulated theorem and its corollary do not indicate how to find the solution to the SLAE. With their help, you can only find out whether these solutions exist or not, and if they exist, then how many.
Methods for solving SLAE
Cramer method
Cramer's method is intended for solving those systems of linear algebraic equations (SLAE) for which the determinant of the matrix of the system is different from zero. Naturally, this implies that the matrix of the system is square (the concept of determinant exists only for square matrices). The essence of Cramer's method can be expressed in three points:
Compose the determinant of the system matrix (it is also called the determinant of the system), and make sure that it is not equal to zero, i.e. ∆≠0.
For each variable xi, it is necessary to compose the determinant Δ X i obtained from the determinant Δ by replacing the i-th column with the column of free members of the given SLAE.
Find the values of the unknowns by the formula xi= Δ X i /Δ
Solving systems of linear algebraic equations using an inverse matrix.
Solving systems of linear algebraic equations (SLAE) using an inverse matrix (sometimes this method is also called the matrix method or the inverse matrix method) requires prior familiarization with such a concept as the matrix form of the SLAE. The inverse matrix method is intended for solving those systems of linear algebraic equations for which the system matrix determinant is nonzero. Naturally, this implies that the matrix of the system is square (the concept of determinant exists only for square matrices). The essence of the inverse matrix method can be expressed in three points:
Write down three matrices: the matrix of the system A, the matrix of unknowns X, the matrix of free members B.
Find the inverse matrix A -1 .
Using the equality X=A -1 ⋅B get the solution of the given SLAE.
Gauss method. Examples of solving systems of linear algebraic equations by the Gauss method.
The Gaussian method is one of the most visual and simple ways to solve systems of linear algebraic equations(SLOW): both homogeneous and heterogeneous. In short, the essence of this method is the sequential elimination of unknowns.
Transformations allowed in the Gauss method:
Changing places of two lines;
Multiplying all elements of a string by some non-zero number.
Adding to the elements of one row the corresponding elements of another row, multiplied by any factor.
Crossing out a line, all elements of which are equal to zero.
Crossing out duplicate lines.
As for the last two points: repeating lines can be deleted at any stage of the solution by the Gauss method - of course, leaving one of them. For example, if lines No. 2, No. 5, No. 6 are repeated, then one of them can be left, for example, line No. 5. In this case, lines #2 and #6 will be deleted.
Zero rows are removed from the expanded matrix of the system as they appear.
Systems of linear equations. Lecture 6
Systems of linear equations.
Basic concepts.
view system
called system - linear equations with unknowns.
Numbers , , are called system coefficients.
Numbers are called free members of the system, – system variables. Matrix

called the main matrix of the system, and the matrix

– expanded matrix system. Matrices - columns
And correspondingly matrices of free members and unknowns of the system. Then, in matrix form, the system of equations can be written as . System solution is called the values of the variables, when substituting which, all the equations of the system turn into true numerical equalities. Any solution of the system can be represented as a matrix-column. Then the matrix equality is true.
The system of equations is called joint if it has at least one solution and incompatible if it has no solution.
To solve a system of linear equations means to find out whether it is consistent and, if compatible, to find its general solution.
The system is called homogeneous if all its free terms are equal to zero. A homogeneous system is always compatible because it has a solution
The Kronecker-Kopelli theorem.
The answer to the question of the existence of solutions of linear systems and their uniqueness allows us to obtain the following result, which can be formulated as the following statements about a system of linear equations with unknowns
 (1)
(1)
Theorem 2. The system of linear equations (1) is consistent if and only if the rank of the main matrix is equal to the rank of the extended one (.
Theorem 3. If the rank of the main matrix of a joint system of linear equations is equal to the number of unknowns, then the system has a unique solution.
Theorem 4. If the rank of the main matrix of a joint system is less than the number of unknowns, then the system has an infinite number of solutions.
Rules for solving systems.
3. Find the expression of the main variables in terms of the free ones and get the general solution of the system.
4. By giving arbitrary values to free variables, all values of the main variables are obtained.
Methods for solving systems of linear equations.
Inverse matrix method.

and , i.e., the system has a unique solution. We write the system in matrix form
where  ,
,
.
,
,
.
Multiply both sides of the matrix equation on the left by the matrix
Since , we obtain , from which we obtain equality for finding unknowns
Example 27. Using the inverse matrix method, solve the system of linear equations 
Decision. Denote by the main matrix of the system
 .
.
Let , then we find the solution by the formula .
Let's calculate .

Since , then the system has a unique solution. Find all algebraic additions
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Thus
 .
.
Let's check

 .
.
The inverse matrix is found correctly. From here, using the formula , we find the matrix of variables .

 .
.
Comparing the values of the matrices, we get the answer: .
Cramer's method.
Let a system of linear equations with unknowns be given

and , i.e., the system has a unique solution. We write the solution of the system in matrix form or

![]()
Denote


. . . . . . . . . . . . . . ,

Thus, we obtain formulas for finding the values of the unknowns, which are called Cramer's formulas.
![]()
Example 28. Solve the following system of linear equations using Cramer's method  .
.
Decision. Find the determinant of the main matrix of the system
 .
.
Since , then , the system has a unique solution.
Find the remaining determinants for Cramer's formulas
 ,
,
 ,
,
 .
.
Using Cramer's formulas, we find the values of the variables
Gauss method.
The method consists in sequential exclusion of variables.
Let a system of linear equations with unknowns be given.

The Gaussian solution process consists of two steps:
At the first stage, the extended matrix of the system is reduced to the stepwise form with the help of elementary transformations
 ,
,
where , which corresponds to the system

After that the variables ![]() are considered free and in each equation are transferred to the right side.
are considered free and in each equation are transferred to the right side.
At the second stage, the variable is expressed from the last equation, the resulting value is substituted into the equation. From this equation
variable is expressed. This process continues until the first equation. The result is an expression of the principal variables in terms of the free variables ![]() .
.
Example 29. Solve the following system using the Gaussian method

Decision. Let us write out the extended matrix of the system and reduce it to the step form

 .
.
As ![]() is greater than the number of unknowns, then the system is compatible and has an infinite number of solutions. Let us write down the system for the step matrix
is greater than the number of unknowns, then the system is compatible and has an infinite number of solutions. Let us write down the system for the step matrix

The determinant of the extended matrix of this system, composed of the first three columns, is not equal to zero, so we consider it to be basic. Variables
Will be basic and the variable will be free. Let's move it in all equations to the left side

From the last equation we express
![]()
Substituting this value into the penultimate second equation, we get
![]()
![]() where
where ![]() . Substituting the values of the variables and into the first equation, we find
. Substituting the values of the variables and into the first equation, we find ![]() . We write the answer in the following form
. We write the answer in the following form
Systems of equations are widely used in the economic industry in the mathematical modeling of various processes. For example, when solving problems of production management and planning, logistics routes (transport problem) or equipment placement.
Equation systems are used not only in the field of mathematics, but also in physics, chemistry and biology, when solving problems of finding the population size.
A system of linear equations is a term for two or more equations with several variables for which it is necessary to find a common solution. Such a sequence of numbers for which all equations become true equalities or prove that the sequence does not exist.
Linear Equation
Equations of the form ax+by=c are called linear. The designations x, y are the unknowns, the value of which must be found, b, a are the coefficients of the variables, c is the free term of the equation.
Solving the equation by plotting its graph will look like a straight line, all points of which are the solution of the polynomial.
Types of systems of linear equations
The simplest are examples of systems of linear equations with two variables X and Y.
F1(x, y) = 0 and F2(x, y) = 0, where F1,2 are functions and (x, y) are function variables.
Solve a system of equations - it means to find such values (x, y) for which the system becomes a true equality, or to establish that there are no suitable values of x and y.
A pair of values (x, y), written as point coordinates, is called a solution to a system of linear equations.
If the systems have one common solution or there is no solution, they are called equivalent.
Homogeneous systems of linear equations are systems whose right side is equal to zero. If the right part after the "equal" sign has a value or is expressed by a function, such a system is not homogeneous.
The number of variables can be much more than two, then we should talk about an example of a system of linear equations with three variables or more.
Faced with systems, schoolchildren assume that the number of equations must necessarily coincide with the number of unknowns, but this is not so. The number of equations in the system does not depend on the variables, there can be an arbitrarily large number of them.
Simple and complex methods for solving systems of equations
There is no general analytical way to solve such systems, all methods are based on numerical solutions. The school mathematics course describes in detail such methods as permutation, algebraic addition, substitution, as well as the graphical and matrix method, the solution by the Gauss method.
The main task in teaching methods of solving is to teach how to correctly analyze the system and find the optimal solution algorithm for each example. The main thing is not to memorize a system of rules and actions for each method, but to understand the principles of applying a particular method.
The solution of examples of systems of linear equations of the 7th grade of the general education school program is quite simple and is explained in great detail. In any textbook on mathematics, this section is given enough attention. The solution of examples of systems of linear equations by the method of Gauss and Cramer is studied in more detail in the first courses of higher educational institutions.
Solution of systems by the substitution method
The actions of the substitution method are aimed at expressing the value of one variable through the second. The expression is substituted into the remaining equation, then it is reduced to a single variable form. The action is repeated depending on the number of unknowns in the system
Let's give an example of a system of linear equations of the 7th class by the substitution method:

As can be seen from the example, the variable x was expressed through F(X) = 7 + Y. The resulting expression, substituted into the 2nd equation of the system in place of X, helped to obtain one variable Y in the 2nd equation. The solution of this example does not cause difficulties and allows you to get the Y value. The last step is to check the obtained values.
It is not always possible to solve an example of a system of linear equations by substitution. The equations can be complex and the expression of the variable in terms of the second unknown will be too cumbersome for further calculations. When there are more than 3 unknowns in the system, the substitution solution is also impractical.
Solution of an example of a system of linear inhomogeneous equations:

Solution using algebraic addition
When searching for a solution to systems by the addition method, term-by-term addition and multiplication of equations by various numbers are performed. The ultimate goal of mathematical operations is an equation with one variable.

Applications of this method require practice and observation. It is not easy to solve a system of linear equations using the addition method with the number of variables 3 or more. Algebraic addition is useful when the equations contain fractions and decimal numbers.
Solution action algorithm:
- Multiply both sides of the equation by some number. As a result of the arithmetic operation, one of the coefficients of the variable must become equal to 1.
- Add the resulting expression term by term and find one of the unknowns.
- Substitute the resulting value into the 2nd equation of the system to find the remaining variable.
Solution method by introducing a new variable
A new variable can be introduced if the system needs to find a solution for no more than two equations, the number of unknowns should also be no more than two.
The method is used to simplify one of the equations by introducing a new variable. The new equation is solved with respect to the entered unknown, and the resulting value is used to determine the original variable.
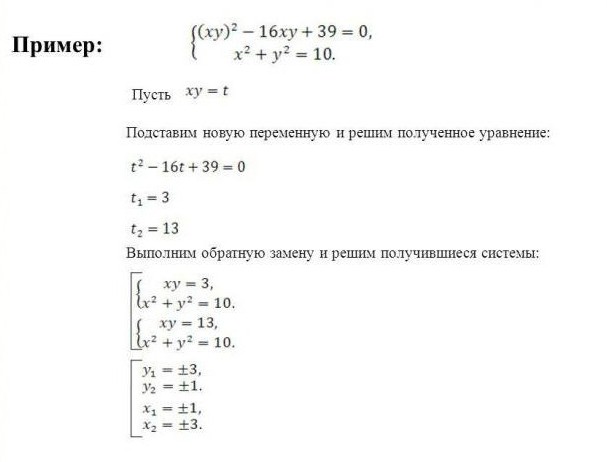
It can be seen from the example that by introducing a new variable t, it was possible to reduce the 1st equation of the system to a standard square trinomial. You can solve a polynomial by finding the discriminant.
It is necessary to find the value of the discriminant using the well-known formula: D = b2 - 4*a*c, where D is the desired discriminant, b, a, c are the multipliers of the polynomial. In the given example, a=1, b=16, c=39, hence D=100. If the discriminant is greater than zero, then there are two solutions: t = -b±√D / 2*a, if the discriminant is less than zero, then there is only one solution: x= -b / 2*a.
The solution for the resulting systems is found by the addition method.
A visual method for solving systems
Suitable for systems with 3 equations. The method consists in plotting graphs of each equation included in the system on the coordinate axis. The coordinates of the points of intersection of the curves will be the general solution of the system.
The graphic method has a number of nuances. Consider several examples of solving systems of linear equations in a visual way.

As can be seen from the example, two points were constructed for each line, the values of the variable x were chosen arbitrarily: 0 and 3. Based on the values of x, the values for y were found: 3 and 0. Points with coordinates (0, 3) and (3, 0) were marked on the graph and connected by a line.
The steps must be repeated for the second equation. The point of intersection of the lines is the solution of the system.
In the following example, it is required to find a graphical solution to the system of linear equations: 0.5x-y+2=0 and 0.5x-y-1=0.

As can be seen from the example, the system has no solution, because the graphs are parallel and do not intersect along their entire length.

The systems from Examples 2 and 3 are similar, but when constructed, it becomes obvious that their solutions are different. It should be remembered that it is not always possible to say whether the system has a solution or not, it is always necessary to build a graph.
Matrix and its varieties
Matrices are used to briefly write down a system of linear equations. A matrix is a special type of table filled with numbers. n*m has n - rows and m - columns.
A matrix is square when the number of columns and rows is equal. A matrix-vector is a single-column matrix with an infinitely possible number of rows. A matrix with units along one of the diagonals and other zero elements is called identity.
An inverse matrix is such a matrix, when multiplied by which the original one turns into a unit one, such a matrix exists only for the original square one.
Rules for transforming a system of equations into a matrix
With regard to systems of equations, the coefficients and free members of the equations are written as numbers of the matrix, one equation is one row of the matrix.
A matrix row is called non-zero if at least one element of the row is not equal to zero. Therefore, if in any of the equations the number of variables differs, then it is necessary to enter zero in place of the missing unknown.
The columns of the matrix must strictly correspond to the variables. This means that the coefficients of the variable x can only be written in one column, for example the first, the coefficient of the unknown y - only in the second.
When multiplying a matrix, all matrix elements are sequentially multiplied by a number.
Options for finding the inverse matrix
The formula for finding the inverse matrix is quite simple: K -1 = 1 / |K|, where K -1 is the inverse matrix and |K| - matrix determinant. |K| must not be equal to zero, then the system has a solution.
The determinant is easily calculated for a two-by-two matrix, it is only necessary to multiply the elements diagonally by each other. For the "three by three" option, there is a formula |K|=a 1 b 2 c 3 + a 1 b 3 c 2 + a 3 b 1 c 2 + a 2 b 3 c 1 + a 2 b 1 c 3 + a 3 b 2 c 1 . You can use the formula, or you can remember that you need to take one element from each row and each column so that the column and row numbers of the elements do not repeat in the product.
Solution of examples of systems of linear equations by the matrix method
The matrix method of finding a solution makes it possible to reduce cumbersome entries when solving systems with a large number of variables and equations.

In the example, a nm are the coefficients of the equations, the matrix is a vector x n are the variables, and b n are the free terms.


Solution of systems by the Gauss method
In higher mathematics, the Gauss method is studied together with the Cramer method, and the process of finding a solution to systems is called the Gauss-Cramer solution method. These methods are used to find the variables of systems with a large number of linear equations.
The Gaussian method is very similar to substitution and algebraic addition solutions, but is more systematic. In the school course, the Gaussian solution is used for systems of 3 and 4 equations. The purpose of the method is to bring the system to the form of an inverted trapezoid. By algebraic transformations and substitutions, the value of one variable is found in one of the equations of the system. The second equation is an expression with 2 unknowns, and 3 and 4 - with 3 and 4 variables, respectively.
After bringing the system to the described form, the further solution is reduced to the sequential substitution of known variables into the equations of the system.
In school textbooks for grade 7, an example of a Gaussian solution is described as follows:

As can be seen from the example, at step (3) two equations were obtained 3x 3 -2x 4 =11 and 3x 3 +2x 4 =7. The solution of any of the equations will allow you to find out one of the variables x n.

Theorem 5, which is mentioned in the text, says that if one of the equations of the system is replaced by an equivalent one, then the resulting system will also be equivalent to the original one.
The Gauss method is difficult for middle school students to understand, but is one of the most interesting ways to develop the ingenuity of children studying in the advanced study program in math and physics classes.
For ease of recording calculations, it is customary to do the following:

Equation coefficients and free terms are written in the form of a matrix, where each row of the matrix corresponds to one of the equations of the system. separates the left side of the equation from the right side. Roman numerals denote the numbers of equations in the system.
First, they write down the matrix with which to work, then all the actions carried out with one of the rows. The resulting matrix is written after the "arrow" sign and continue to perform the necessary algebraic operations until the result is achieved.
As a result, a matrix should be obtained in which one of the diagonals is 1, and all other coefficients are equal to zero, that is, the matrix is reduced to a single form. We must not forget to make calculations with the numbers of both sides of the equation.
This notation is less cumbersome and allows you not to be distracted by listing numerous unknowns.
The free application of any method of solution will require care and a certain amount of experience. Not all methods are applied. Some ways of finding solutions are more preferable in a particular area of human activity, while others exist for the purpose of learning.
Example 1. Find a general solution and some particular solution of the systemDecision do it with a calculator. We write out the extended and main matrices: 
The dotted line separates the main matrix A. We write the unknown systems from above, bearing in mind the possible permutation of the terms in the equations of the system. Determining the rank of the extended matrix, we simultaneously find the rank of the main one. In matrix B, the first and second columns are proportional. Of the two proportional columns, only one can fall into the basic minor, so let's move, for example, the first column beyond the dashed line with the opposite sign. For the system, this means the transfer of terms from x 1 to the right side of the equations. 
We bring the matrix to a triangular form. We will work only with rows, since multiplying a row of a matrix by a non-zero number and adding it to another row for the system means multiplying the equation by the same number and adding it to another equation, which does not change the solution of the system. Working with the first row: multiply the first row of the matrix by (-3) and add to the second and third rows in turn. Then we multiply the first row by (-2) and add it to the fourth one. 
The second and third lines are proportional, therefore, one of them, for example the second, can be crossed out. This is equivalent to deleting the second equation of the system, since it is a consequence of the third one. 
Now we work with the second line: multiply it by (-1) and add it to the third. 
The dashed minor has the highest order (of all possible minors) and is non-zero (it is equal to the product of the elements on the main diagonal), and this minor belongs to both the main matrix and the extended one, hence rangA = rangB = 3 .
Minor  is basic. It includes coefficients for unknown x 2, x 3, x 4, which means that the unknown x 2, x 3, x 4 are dependent, and x 1, x 5 are free.
is basic. It includes coefficients for unknown x 2, x 3, x 4, which means that the unknown x 2, x 3, x 4 are dependent, and x 1, x 5 are free.
We transform the matrix, leaving only the basic minor on the left (which corresponds to point 4 of the above solution algorithm). 
The system with coefficients of this matrix is equivalent to the original system and has the form

x 4 =3-4x 5 , x 3 =3-4x 5 -2x 4 =3-4x 5 -6+8x 5 =-3+4x 5
x 2 =x 3 +2x 4 -2+2x 1 +3x 5 = -3+4x 5 +6-8x 5 -2+2x 1 +3x 5 = 1+2x 1 -x 5
We got relations expressing dependent variables x 2, x 3, x 4 through free x 1 and x 5, that is, we found a general solution:

Giving arbitrary values to the free unknowns, we obtain any number of particular solutions. Let's find two particular solutions:
1) let x 1 = x 5 = 0, then x 2 = 1, x 3 = -3, x 4 = 3;
2) put x 1 = 1, x 5 = -1, then x 2 = 4, x 3 = -7, x 4 = 7.
Thus, we found two solutions: (0.1, -3,3,0) - one solution, (1.4, -7.7, -1) - another solution.
Example 2. Investigate compatibility, find a general and one particular solution of the system 
Decision. Let's rearrange the first and second equations to have a unit in the first equation and write the matrix B. 
We get zeros in the fourth column, operating on the first row: 
Now get the zeros in the third column using the second row: 
 The third and fourth rows are proportional, so one of them can be crossed out without changing the rank:
The third and fourth rows are proportional, so one of them can be crossed out without changing the rank:
Multiply the third row by (-2) and add to the fourth: 
We see that the ranks of the main and extended matrices are 4, and the rank coincides with the number of unknowns, therefore, the system has a unique solution:
-x 1 \u003d -3 → x 1 \u003d 3; x 2 \u003d 3-x 1 → x 2 \u003d 0; x 3 \u003d 1-2x 1 → x 3 \u003d 5.
x 4 \u003d 10- 3x 1 - 3x 2 - 2x 3 \u003d 11.
Example 3. Examine the system for compatibility and find a solution if it exists. 
Decision. We compose the extended matrix of the system. 
 Rearrange the first two equations so that there is a 1 in the upper left corner:
Rearrange the first two equations so that there is a 1 in the upper left corner:
Multiplying the first row by (-1), we add it to the third: 
Multiply the second line by (-2) and add to the third: 
The system is inconsistent, since the main matrix received a row consisting of zeros, which is crossed out when the rank is found, and the last row remains in the extended matrix, that is, r B > r A .
Exercise. Investigate this system of equations for compatibility and solve it by means of matrix calculus.
Decision
Example. Prove the compatibility of a system of linear equations and solve it in two ways: 1) by the Gauss method; 2) Cramer's method. (enter the answer in the form: x1,x2,x3)
Solution :doc :doc :xls
Answer: 2,-1,3.
Example. A system of linear equations is given. Prove its compatibility. Find a general solution of the system and one particular solution.
Decision
Answer: x 3 \u003d - 1 + x 4 + x 5; x 2 \u003d 1 - x 4; x 1 = 2 + x 4 - 3x 5
Exercise. Find general and particular solutions for each system.
Decision. We study this system using the Kronecker-Capelli theorem.
We write out the extended and main matrices:
| 1 | 1 | 14 | 0 | 2 | 0 |
| 3 | 4 | 2 | 3 | 0 | 1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
| x 1 | x2 | x 3 | x4 | x5 |
Here matrix A is in bold type.
We bring the matrix to a triangular form. We will work only with rows, since multiplying a row of a matrix by a non-zero number and adding it to another row for the system means multiplying the equation by the same number and adding it to another equation, which does not change the solution of the system.
Multiply the 1st row by (3). Multiply the 2nd row by (-1). Let's add the 2nd line to the 1st:
| 0 | -1 | 40 | -3 | 6 | -1 |
| 3 | 4 | 2 | 3 | 0 | 1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Multiply the 2nd row by (2). Multiply the 3rd row by (-3). Let's add the 3rd line to the 2nd:
| 0 | -1 | 40 | -3 | 6 | -1 |
| 0 | -1 | 13 | -3 | 6 | -1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Multiply the 2nd row by (-1). Let's add the 2nd line to the 1st:
| 0 | 0 | 27 | 0 | 0 | 0 |
| 0 | -1 | 13 | -3 | 6 | -1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
The selected minor has the highest order (of all possible minors) and is different from zero (it is equal to the product of the elements on the reciprocal diagonal), and this minor belongs to both the main matrix and the extended one, therefore rang(A) = rang(B) = 3 Since the rank of the main matrix is equal to the rank of the extended one, then the system is collaborative.
This minor is basic. It includes coefficients for unknown x 1, x 2, x 3, which means that the unknown x 1, x 2, x 3 are dependent (basic), and x 4, x 5 are free.
We transform the matrix, leaving only the basic minor on the left.
| 0 | 0 | 27 | 0 | 0 | 0 |
| 0 | -1 | 13 | -1 | 3 | -6 |
| 2 | 3 | -3 | 1 | -3 | 2 |
| x 1 | x2 | x 3 | x4 | x5 |
27x3=
- x 2 + 13x 3 = - 1 + 3x 4 - 6x 5
2x 1 + 3x 2 - 3x 3 = 1 - 3x 4 + 2x 5
By the method of elimination of unknowns we find:
We got relations expressing dependent variables x 1, x 2, x 3 through free x 4, x 5, that is, we found common decision:
x 3 = 0
x2 = 1 - 3x4 + 6x5
x 1 = - 1 + 3x 4 - 8x 5
uncertain, because has more than one solution.
Exercise. Solve the system of equations.
Answer:x 2 = 2 - 1.67x 3 + 0.67x 4
x 1 = 5 - 3.67x 3 + 0.67x 4
Giving arbitrary values to the free unknowns, we obtain any number of particular solutions. The system is uncertain
System of linear algebraic equations. Basic terms. Matrix notation.
Definition of a system of linear algebraic equations. System solution. Classification of systems.
Under system of linear algebraic equations(SLAE) imply a system
The parameters aij are called coefficients, and bi free members SLAU. Sometimes, to emphasize the number of equations and unknowns, they say “m × n system of linear equations”, thereby indicating that the SLAE contains m equations and n unknowns.
If all free terms bi=0 then SLAE is called homogeneous. If among the free members there is at least one other than zero, the SLAE is called heterogeneous.
SLAU decision(1) any ordered collection of numbers is called (α1,α2,…,αn) if the elements of this collection, substituted in a given order for the unknowns x1,x2,…,xn, turn each SLAE equation into an identity.
Any homogeneous SLAE has at least one solution: zero(in a different terminology - trivial), i.e. x1=x2=…=xn=0.
If SLAE (1) has at least one solution, it is called joint if there are no solutions, incompatible. If a joint SLAE has exactly one solution, it is called certain, if there are an infinite number of solutions - uncertain.

Matrix form of writing systems of linear algebraic equations.
Several matrices can be associated with each SLAE; moreover, the SLAE itself can be written as a matrix equation. For SLAE (1), consider the following matrices:

The matrix A is called system matrix. The elements of this matrix are the coefficients of the given SLAE.
The matrix A˜ is called expanded matrix system. It is obtained by adding to the system matrix a column containing free members b1,b2,...,bm. Usually this column is separated by a vertical line, for clarity.
The column matrix B is called matrix of free members, and the column matrix X is matrix of unknowns.
Using the notation introduced above, SLAE (1) can be written in the form of a matrix equation: A⋅X=B.
Note
The matrices associated with the system can be written in various ways: everything depends on the order of the variables and equations of the considered SLAE. But in any case, the order of the unknowns in each equation of a given SLAE must be the same
The Kronecker-Capelli theorem. Investigation of systems of linear equations for compatibility.
Kronecker-Capelli theorem
A system of linear algebraic equations is consistent if and only if the rank of the matrix of the system is equal to the rank of the extended matrix of the system, i.e. rankA=rankA˜.
A system is called consistent if it has at least one solution. The Kronecker-Capelli theorem says this: if rangA=rangA˜, then there is a solution; if rangA≠rangA˜, then this SLAE has no solutions (inconsistent). The answer to the question about the number of these solutions is given by a corollary of the Kronecker-Capelli theorem. In the formulation of the corollary, the letter n is used, which is equal to the number of variables of the given SLAE.
Corollary from the Kronecker-Capelli theorem
If rangA≠rangA˜, then the SLAE is inconsistent (has no solutions).
If rankA=rankA˜ If rangA=rangA˜=n, then the SLAE is definite (it has exactly one solution).
Note that the formulated theorem and its corollary do not indicate how to find the solution to the SLAE. With their help, you can only find out whether these solutions exist or not, and if they exist, then how many.
Methods for solving SLAE
Cramer method
Cramer's method is intended for solving those systems of linear algebraic equations (SLAE) for which the determinant of the matrix of the system is different from zero. Naturally, this implies that the matrix of the system is square (the concept of determinant exists only for square matrices). The essence of Cramer's method can be expressed in three points:
Compose the determinant of the system matrix (it is also called the determinant of the system), and make sure that it is not equal to zero, i.e. ∆≠0.
For each variable xi, it is necessary to compose the determinant Δ X i obtained from the determinant Δ by replacing the i-th column with the column of free members of the given SLAE.
Find the values of the unknowns by the formula xi= Δ X i /Δ
Solving systems of linear algebraic equations using an inverse matrix.
Solving systems of linear algebraic equations (SLAE) using an inverse matrix (sometimes this method is also called the matrix method or the inverse matrix method) requires prior familiarization with such a concept as the matrix form of the SLAE. The inverse matrix method is intended for solving those systems of linear algebraic equations for which the system matrix determinant is nonzero. Naturally, this implies that the matrix of the system is square (the concept of determinant exists only for square matrices). The essence of the inverse matrix method can be expressed in three points:
Write down three matrices: the matrix of the system A, the matrix of unknowns X, the matrix of free members B.
Find the inverse matrix A -1 .
Using the equality X=A -1 ⋅B get the solution of the given SLAE.
Gauss method. Examples of solving systems of linear algebraic equations by the Gauss method.
The Gaussian method is one of the most visual and simple ways to solve systems of linear algebraic equations(SLOW): both homogeneous and heterogeneous. In short, the essence of this method is the sequential elimination of unknowns.
Transformations allowed in the Gauss method:
Changing places of two lines;
Multiplying all elements of a string by some non-zero number.
Adding to the elements of one row the corresponding elements of another row, multiplied by any factor.
Crossing out a line, all elements of which are equal to zero.
Crossing out duplicate lines.
As for the last two points: repeating lines can be deleted at any stage of the solution by the Gauss method - of course, leaving one of them. For example, if lines No. 2, No. 5, No. 6 are repeated, then one of them can be left, for example, line No. 5. In this case, lines #2 and #6 will be deleted.
Zero rows are removed from the expanded matrix of the system as they appear.
 Two heads and six legs; four walk, and two lie still
Two heads and six legs; four walk, and two lie still Self-esteem - what is it: concept, structure, types and levels
Self-esteem - what is it: concept, structure, types and levels Cassandra's Path, or Pasta Adventures War on Earth and Underground
Cassandra's Path, or Pasta Adventures War on Earth and Underground