Find out the type of singular points of the function. Laurent series isolated singular points and their classification
Let be zq - singular point of the function f(z), t.s. f(z) but is analytic at this point (in particular, may not be defined at it). If there exists such a punctured neighborhood of the point zq (i.e., the set O z - zq f(z) is aliatic, then zo called isolated singular point functions f(z). This definition is also preserved in the case zn = oo, if iodine is a punctured neighborhood of a point zq = oo understand the set z > I - the appearance of some circle centered at the origin. In other words, the singular point zq is said to be isolated if there exists a neighborhood of this point in which there are ist other singular points different from zq. Everywhere below, we consider only singular points of a single-valued character (the function f(z) assumed to be unique).
Depending on the behavior of the function f(z) at z -> zq There are three types of singular points. Isolated singular point zq functions f(z) called:
1) removable singular point if there is a finite limit
2) pole if there is a limit 
3) essential point, if f(z) has neither a finite nor an infinite limit for z-> zq.
EXAMPLE 26.1. Let us show that all three types of singular points are realized. Consider f(z)= point zq = 0 is isolated
singular point of this function. Using formula (22.12), we obtain the expansion

from which it follows that there exists lim fi(z)= 1. Therefore, zq = 0 is
is a removable singular point of the function fi(z).
Function f'j(z) =--- has a pole at a point zo= 1 because
2 r“ X
Consider now the function )z(z)= e 1 ^ r and show that zo = O is an essential singular point of this function. When striving z to zero along the real axis, the left and right limits of the function f (z) different: lim with 1 / 1 = 0,lim with 1 /* = os. This implies,
x->0-0 x->0+O
what f:i(z) has neither a finite nor an infinite limit for 2 ->
Oh, i.e. zq = 0 is an essentially singular point of this function. (Note that as the point tends z-iy to zero on the imaginary axis function 
has no limit at all.)
Of course, there are also non-isolated singular points. For example. function has poles at points z n = -, P= ±1, ±2,...
Hence, Zq = 0 is a non-isolated singular point of this function: in any (arbitrarily small) neighborhood of this point there are other singular points g p.
Let be zo- final isolated singular point of a function f(z). Then f(z) is similar in some punctured neighborhood 0 Zo of the point zo this neighborhood can be regarded as a ring with inner radius r = 0. By Theorem 25.1, in the neighborhood under consideration, the function f(z) can be expanded in a Laurent series (25.2). We will show that the behavior of the function for 2 -> zq (i.e. the type of singular point zo) depends on the form of the main part of the decomposition (25.2); this circumstance explains the origin of the term “main part”.
THEOREM 2G.2. An isolated singular point zo of a function f(z) is removable if and only if the Lorap expansion in a punctured neighborhood of this point has the oid
those. consists of only the correct part, and all the coefficients of the main part are equal to the bullet.
Proof. 1. Let zo is a removable singular point. Let us prove that the Laurent expansion of the function f(z) has the form (26.1). Since the singular point zo removable, then there is a finite limit lim f(z) = A. Hence, f(z) bounded in some punctured neighborhood 0 z - zq of the point zo, those. )(z) for all z from this neighborhood. Take any R. U р /?|, and use the formulas (25.3) for the coefficients of the Laurent series:

For the coefficients of the main part of the expansion n =- 1,-2,... For such values P we have p~n-e 0 at R-> 0. Since the value R can be chosen arbitrarily small, then Mr~" can be arbitrarily small. Since |c t,| ^ Mr~n and cn do not depend on p, then cn = 0 for and= - 1, -2,..., which was to be proved.
2. Let us now assume that the Laurent expansion has the form (26.1). Series (26.1) is a power series and. therefore, converges not only in the punctured, but also in the entire neighborhood z-zq including the dot zo; its sum S(z) is analytic for z and S(z) = )(z) at 0 z - zo R. Therefore, there is a finite limit lim )(z)\u003d Pm 5 (r) \u003d 5 (r) - Therefore, the singular point zq
Z->Zo Z-*Zo
disposable. The theorem has been proven.
Comment. It follows from the proof of the theorem that in a punctured neighborhood 0 z - zo of a removable singular point, the function f(z) coincides with the function S(r), which is analytic in the entire neighborhood z - zo . Therefore, if we put /(th) = S(zq), then, without changing the values of the function f(z) at any point of the punctured neighborhood, we make this function analytic in r, i.e. “remove” the feature. This explains the term “removable singularity”. It is natural to consider such points as regular, and not as singular points of the function f(z).
Consider, for example, the function

In example 26.1, it was shown that Pm (n) = 1. i.e. singular point
zq = 0 is removable. Setting /i(0) = 1, we thereby eliminate the singularity and obtain a function that is analytic at the point zq = 0 (and in the entire plane C).
Let us now characterize the poles in terms of Laurent expansions.
Theorem 26.3. An isolated singular point Zo of a function f(z) is a pole if and only if, when the principal part of the Laurent expansion with center Zq has only a finite number of distinct
from zero coefficients with n:
Proof. 1. Let zq - pole, i.e. lim /( z) = oo.
Let us prove that the Laurent expansion of the function f(z) has the form (2G.2). Since lim f(z)= oo. then there exists a punctured neighborhood of the point
ki zq. wherein f(z) is analytic and has no zeros. Then the function g(z) = 1 /f(z) will also be analytic in this punctured neighborhood, and lim g(z)= 0. Therefore, Zo is disposable *-? *0
singular point of the function g(z). Let's redefine g(z) at the point zo, putting g(zo)= 0. Then g(z) becomes analytic in the entire neighborhood of the (not punctured) point z 0 , and z0 will be its isolated zero. Denote by N multiplicity (order) of this zero. As was shown in §23, in a neighborhood of the point zq function g(z) representable in the form (see (23.2))
and (z$) f 0 and y>(z) is analytic in some neighborhood of the point zo- As ip(z) continuous at point zo and g>(zo) F 0" then ip(z) has no zeros in some neighborhood of this point either. Therefore function 1 /-p(z) will also be analytic in this neighborhood and, therefore, expands in it in a Taylor series:

Expanding the brackets and changing the designations of the coefficients, we write the last expansion in the form

where c_jv = 1>o f 0. Thus, the principal part of the Laurent expansion of f(r) contains only a finite number of terms; we have arrived at the required equality (26.2).
2. Let in a punctured neighborhood of a point th function )(z) is represented by the Laurent expansion (26.2) (in a more expanded form, see (26.3)), the main part of which contains only a finite number of terms, and with- d" f 0. We must prove that Zq - function pole f(z). Multiplying equality (26.3) by (G - G o) iV , we get the function
The series in (26.4) is a power series converging to an analytic function not only in the punctured, but also in the entire neighborhood of the point Zq. Therefore, the function h(z) becomes analytic in this neighborhood if we extend it in th by setting h(zo)= s_dg f 0. Then
Thus, the point o is a pole, and Theorem 26.3 is proved.
Multiplicity (order) of the zeroth function g(z)= 1//(r) is called pole order function /(r). If a N- the order of the pole is th, then g(z)= (r - Zo)N ip(z), and (go) F 0, and, as shown in the first part of the proof of Theorem 26.3, the expansion of f(r) has the form (26.3), where c_/v f 0. Conversely, if f(r) expands into the series (26.3) and e-z F 0, then
t.s. N- the order of the pole of the function f(r). Thus, the order of the zq pole of the function/(G) is equal to the number of the leading nonzero coefficient of the main part of the Laurent expansion in the punctured neighborhood of the point zq(i.e. equal to such a number N, what s_dg f 0 and sp= 0 at P > N).
Let us prove the following assertion, which is convenient) for applications.
Corollary 26.4. The point zq is a pole of order N of the fiction/(G) if and only if/(G) represent in the form
where h(z) is an analytic function in a neighborhood of a point th and h(zo) f 0.
Proof. Function cp(z) = l/h(z) is analytic in some neighborhood of the point r. The condition of Corollary 26.4 is equivalent to the following:
So zq - multiplicity zero N functions g(z). and hence the multiplicity pole N functions /(2).
II example 26.5. Find isolated singular points of a function  and determine their type.
and determine their type.
D e u c tio n. The points at which (z 2 + 1 )(z+ H) 2 = 0. If z 2 L- 1 = 0 then 2 = ±r if (z 4- H) 2 = 0, then z= -3. Therefore, the function has three singular points z= r, 22 = -r, Z3 = - 3. Consider z:
G - first-order pole (we used Corollary 26.4). It can be proved similarly that 22 = -i also a pole of the first order. For 2h we have:

Let us pass to the consideration of essentially singular points.
Theorem 26.6. An isolated singular point zq of a function f(z) is essentially singular if and only if the main part of the Laurent expansion centered at zq has infinitely many different from. zero, coefficients with p.
Proof. Theorem 26.6 follows directly from Theorems 26.2 and 26.3. Indeed, if the point zq is essentially singular, then the main part of the Laurent expansion cannot be absent or contain a finite number of terms (otherwise the point Zq will be either removable or a pole). Therefore, the number of terms in the main part must be infinite.
Conversely, if the main part contains infinitely many members, then Zq can be neither a removable point nor a pole. Consequently, this point is essentially singular.
According to the definition, an essentially singular point is characterized by the fact that the function f(2) has neither a finite nor an infinite limit for z ->zq. A more complete idea of how irregular the behavior of a function is in a neighborhood of an essentially singular point is given by the following theorem.
Theorem 26.7 (Sochocki's theorem). If zq is essentially singular, then the point of the function f(z), then for any complex number L, including A = oo, there is a sequence of points z n such that z n -> zo and lim f(zn) = BUT.
n->os
Proof. Consider first the case A = oo. In the first part of the proof of Theorem 2G.2, we established that if f(z) is bounded in some punctured neighborhood of the point r0, then all the coefficients c, n = - 1, - 2,... of the main part are equal to zero (and, consequently, the singularity in th is removable). Since by assumption r0 is an essentially singular point, the function f(r) is unbounded in any punctured neighborhood of the point r0. Let us take some narrow neighborhood 0 Z such that f(zi) > 1 (if |/(r)| z - zo R/2 there is a point z-2 , where |/(dd)| > 2, etc.: in the punctured neighborhood O 71. It is obvious that rn -e go and lim /(r«) = oo. Thus, in the case A = oo, Theorem 26.7
proven.
Let now A f oo. Assume first that there is a punctured neighborhood 0
= -yy---- will be analytic in this punctured neighborhood and, consequently,
/(G) - BUT
consequently, r is an isolated singular point of the function Φ(r). Let's show. that r0 is an essentially singular point of Φ(r). Let it be wrong. Then there exists a limit lim Φ(r), either finite or infinite. Because
/(r) = A + , then Hsh /(r) also exists, which contradicts the condition
F(g) ~ :-*z 0
view of the theorem. Thus r0 is an essentially singular point of the function Φ(r). According to what was proved above, there is a sequence of points r n such that r n o and lim Φ(r n) = oo. From here
We have proved the required assertion under the assumption that f(r) F A in some punctured neighborhood of the point r. Let us now assume that this is not true, i.e. in any arbitrarily small punctured neighborhood of the point th there is such a point G", that f(r") = A. Then for any P in the punctured neighborhood 0 f(z u) = L. Thus, the required assertion is true P-yuo
in all cases, and Theorem 26.7 is proved.
According to (Sokhotsky's) Theorem 26.7, in any (arbitrarily small) punctured neighborhood of an essentially singular point the function f(r) takes values arbitrarily close to any number in the extended complex plane C.
To study isolated singular points, the well-known Taylor expansions of basic elementary functions are often useful.
EXAMPLE 2G.8. Determine the type of singular point zq = 0 for the function

Solved and e. We expand the numerator and denominator in a Taylor series in powers of r. Substituting into (22.11) 3 z instead of r and subtracting 1, we get
Using (22.12), we obtain the expansion of the denominator:
The series in these expansions converge in the entire complex plane €. We have

and /2(2) are analogous in a neighborhood of the point zo = 0 (and even in the whole plane) and /2(20) F 0, then h(z) is also analytic in some neighborhood of the point gF 0. According to Corollary 26.4, the point Zo = 0 is the pole of the order N = 4.
II example 26.9. Find Singular Points of a Function f(z)= sin j - and determine their type.
P e in e and e. The function has a single final singular point zq = 1. At other points from C, the function w =--- analytical; hence the sin function w will be analytical.
Substituting in the expansion of the sine (22.12) - instead of r, we get
We have obtained the expansion of the sin function in a Laurent series in a punctured neighborhood of the point 20 = 1. Since the resulting expansion contains infinitely many terms with negative powers (r - 1), then zq = 1 is an essential singular point (in this case, the Laurent expansion consists only of the main part, and the correct part is missing).
Note that in this case it was also possible to establish the nature of the singularity directly from the definition, without resorting to series expansion. Indeed, there are sequences (r") and (2") converging to zo= 1, and such that f(z" n)= 1, /(2") = 0 (specify such sequences yourself). So, f(z) has no limit when z -> 1 and hence the point zq - 1 is essentially singular.
Let us introduce the concept of a Laurent expansion of a function in a neighborhood of a point Zq = 00 and consider the connection between the expansion and the nature of the singularity at this point. Note that the definitions of an isolated singular point and its type (removable, pole, or essentially singular) carry over to the case zq = oc unchanged. But Theorems 26.2. 26.3 and 26.6, related to the nature of the Laurent expansions, need to be changed. The point is that the members c n (z - 2o) p. P= -1,-2,..., the main part, defining the "‘irregularity" of the function near the end point Zq, as 2 tends to oo, they will behave “correctly” (tend to 0). On the contrary, the members of the regular part with P= 1,2,... will tend to oo; they determine the nature of the singularity in Zq = oo. Therefore, the main part of the expansion in the neighborhood of oo will be the terms with positive powers P, and correct - with negative.
Let's introduce a new variable w = 12. Function tv= 1/2, extended so that u(oo) = 0, one-to-one and conformally maps the neighborhood z > R points zq = 00 in the neighborhood of |w| wq = 0. If the function f(z) analytics in a punctured neighborhood R z Zq = oc, then the function G(w) = f(l/w) will be analytic in the yellow neighborhood 0 wo = 0. Since for 2 -> oo there will be w-> 0, then
So G(w) has at the point wq = 0 is a singularity of the same type as f(z) at the point Zq = 00. Let us expand the function G(w) in a Laurent series in a punctured neighborhood of the point wo = 0:
The sums on the right side of (26.5) represent the correct and main parts of the expansion, respectively. Let's move on to the variable z, substituting w = 1/z: 
denoting P\u003d -A *, 6 * \u003d 6_ " \u003d with p and noticing that G(l/z) = f(z), we get
The decomposition (2G.G) is called Laurent expansion of the function f(z) in a punctured neighborhood of the point zq= oo. The first sum in (2G.6) is called right part, and the second sum is main part this decomposition. Since these sums correspond to the correct and principal parts of the expansion (26.5), the expansion (26.6) satisfies the analogs of Theorems 26.2, 26.3, and 26.6. Thus, the following theorem is an analogue of Theorem 26.2.
Theorem 26.10. Isolated singular pointZq - os (functions/(G) is removable if and only if the Laurent expansion in a punctured neighborhood of this point has the form
t.s. consists of only the correct part.
We put /(oo) = co. The function defined by the series (26.7) converging in the neighborhood z > R points 2o \u003d oc, called analytic at the point z o = oo. (Note that this definition is equivalent to the analyticity of the function G(w) at the point wo = 0.)
Example 26.11. Investigate the singular point zq = oo of the function

Since the limit is finite, then zo = oo is a removable singular point of the function f(r). If we put /(oo) = lim J(z)= 0, then f(z) will become

tic at point Zo= os. Let us show how to find the corresponding expansion (26.7). Let's move on to the variable w = 1 fz. Substituting z= 1 /?e, we get
(the last equality is valid in the punctured neighborhood of the point ww = 0, but we will extend the definition (7(0) = 0). The resulting function has singular points w =±i, w =-1/3, and at the point Wq = 0 is analytic. Expanding function G(w) by degrees w(as was done in Example 25.7) and substituting into the resulting power series w = 1/z one can obtain the expansion (26.7) of the function f(z).
Theorem 26.3 for the case zo= oo will be rewritten in the following form.
Theorem 26.12. Isolated singular point go = os function f(z) is a pole if and only if the principal part of the Laurent expansion (26.6) has only a finite number of non-zero coefficients with":
Here the series is the regular part, and the parenthesized polynomial is the main part of the expansion. The multiplicity of the pole in oc is defined as the multiplicity of the pole wq = 0 functions G(z). It is easy to see that the multiplicity of the pole coincides with the number N in (26.8).
Q p | (i 2 + 1) (z + 3) 2
Task. Show that the function f(z) =-- -- has in
point zo = oo pole order 3.
Theorem 26.6 on an essential singular point is rewritten for the case zo= os almost verbatim, and we do not dwell on it in detail.
Models described by systems of two autonomous differential equations.
phase plane. Phase portrait. isocline method. main isoclines. Steady State Stability. Linear systems. Key point types: node, saddle, focus, center. Example: first order chemical reactions.
The most interesting results on the qualitative modeling of the properties of biological systems were obtained on models of two differential equations, which allow a qualitative study using the method phase plane. Consider a system of two autonomous ordinary differential equations of the general form
(4.1)
P(x,y), Q(x,y)- continuous functions defined in some domain G Euclidean plane ( x,y- Cartesian coordinates) and having in this area continuous derivatives of order not lower than the first.
Region G can be either unlimited or limited. If variables x, y have a specific biological meaning (concentrations of substances, abundance of species), most often the area G is the positive quadrant of the right half-plane:
0 £ x< ¥ ,0 £ y< ¥ .
The concentrations of substances or the abundance of species can also be limited from above by the volume of the vessel or by the area of the habitat. Then the range of variables has the form:
0 £ x< x 0 , 0 £ y< y 0 .
Variables x, y change in time in accordance with the system of equations (4.1), so that each state of the system corresponds to a pair of values of variables ( x, y).
|
|

 |
Conversely, for each pair of variables ( x, y) corresponds to a certain state of the system.
Consider a plane with coordinate axes on which the values of variables are plotted x,y. Every point M this plane corresponds to a certain state of the system. Such a plane is called the phase plane and depicts the totality of all states of the system. The point M(x, y) is called the depicting or representing point.
Let at the initial time t=t 0 representing point coordinates M 0 (x(t 0),y(t 0)). At each next moment in time t the depicting point will move according to changes in the values of the variables x(t),y(t). Set of points M(x(t), y(t)) on the phase plane, the position of which corresponds to the states of the system in the process of changing variables over time x(t), y(t) according to equations (4.1), is called phase trajectory.
The set of phase trajectories for different initial values of the variables gives an easily visible "portrait" of the system. Building phase portrait allows you to draw conclusions about the nature of changes in variables x, y without knowing the analytical solutions of the original system of equations(4.1).
To depict a phase portrait, it is necessary to construct a vector field of directions for the system trajectories at each point of the phase plane. By specifying an incrementD t>0,we get the corresponding increments D x and D y from expressions:
D x=P(x,y)D t,
D y=Q(x,y)D t.
vector direction dy/dx at point ( x, y) depends on the sign of the functions P(x, y), Q(x, y) and can be given by a table:
|
P(x,y)>0,Q(x,y)>0 |
|
|
P(x,y)<0,Q(x,y)<0 |
|
|
P(x,y)>0,Q(x,y)<0 |
|
|
P(x,y)<0,Q(x,y)>0 |
|


.(4.2)
Solution to this equation y=y(x, c), or implicitly F(x,y)=c, where with is the constant of integration, gives the family of integral curves of equation (4.2) - phase trajectories system (4.1) on the plane x, y.
Isocline method
To construct a phase portrait, one uses isocline method - lines are drawn on the phase plane that intersect the integral curves at one specific angle. The isocline equation is easy to obtain from (4.2). Let's put
where BUT– a certain constant. Meaning BUT represents the tangent of the slope of the tangent to the phase trajectory and can take values from -¥ to + ¥ . Substituting instead of dy/dx in (4.2) the quantity BUT we get the isocline equation:
.(4.3)
Equation (4.3) determines at each point of the plane the only tangent to the corresponding integral curve, except for the point where P(x,y)= 0, Q (x,y) = 0 , in which the direction of the tangent becomes indefinite, since the value of the derivative becomes indefinite:
![]() .
.
This point is the intersection point of all isoclines - special point. It simultaneously vanishes the time derivatives of the variables x and y.
![]()
Thus, at the singular point, the rates of change of variables are equal to zero. Therefore, the singular point of the differential equations of phase trajectories (4.2) corresponds to stationary state of the system(4.1), and its coordinates are the stationary values of the variables x, y.
Of particular interest are main isoclines:
dy/dx=0, P(x,y)=0 – isocline of horizontal tangents and
dy/dx=¥ , Q(x,y)=0 – isocline of vertical tangents.
By constructing the main isoclines and finding the point of their intersection (x,y), the coordinates of which satisfy the conditions:
we will thus find the point of intersection of all isoclines of the phase plane, at which the direction of the tangents to the phase trajectories is indefinite. This is - singular point, which corresponds stationary state of the system(Fig. 4.2).
System (4.1) has as many stationary states as there are intersection points of the main isoclines on the phase plane.
Each phase trajectory corresponds to a set of motions of a dynamical system passing through the same states and differing from each other only by the beginning of the time reference.
 |
|

If the conditions of the Cauchy theorem are satisfied, then through each point of the space x, y, t passes through a single integral curve. The same is true, thanks to autonomy, for phase trajectories: a unique phase trajectory passes through each point of the phase plane.
Steady State Stability
Let the system be in equilibrium.
Then the representative point is located at one of the singular points of the system, in which, by definition:
![]() .
.
Whether a singular point is stable or not is determined by whether the representative point leaves or not with a small deviation from the stationary state. As applied to a system of two equations, the definition of stability in the languagee, das follows.
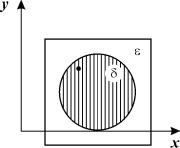
The equilibrium state is stable if for any given area of deviations from the equilibrium state (e )area can be specified d (e ), surrounding the state of equilibrium and having the property that no trajectory that starts inside the region d , will never reach the border e . (Fig. 4.4)
 |
|
For a large class of systems - rough systems – the nature of the behavior of which does not change with a small change in the type of equations, information about the type of behavior in the vicinity of the stationary state can be obtained by studying not the original, but the simplified linearized system.
Linear systems.
Consider a system of two linear equations:
![]() .(4.4)
.(4.4)
Here a, b, c, d- constants, x, y- Cartesian coordinates on the phase plane.
The general solution will be sought in the form:
![]() .(4.5)
.(4.5)
Substitute these expressions in (4.4) and reduce by e l t:
(4.6)
Algebraic system of equations (4.6) with unknowns A, B has a nonzero solution only if its determinant, composed of the coefficients of the unknowns, is equal to zero:
![]() .
.
Expanding this determinant, we obtain the characteristic equation of the system:
.(4.7)
The solution of this equation gives the values of the indicatorl 1,2 , under which nonzero values are possible for A and B solutions of equation (4.6). These values are
![]() .(4.8)
.(4.8)
If the radical expression is negative, thenl 1,2 complex conjugate numbers. Assume that both roots of equation (4.7) have nonzero real parts and that there are no multiple roots. Then the general solution of system (4.4) can be represented as a linear combination of exponents with exponentsl 1 , l 2 :
 (4.9)
(4.9)
To analyze the nature of the possible trajectories of the system on the phase plane, we use linear homogeneous coordinate transformation, which will bring the system to canonical form:
![]() ,(4.10)
,(4.10)
which allows a more convenient representation on the phase plane compared to the original system (4.4). Let's introduce new coordinatesξ , η according to the formulas:
(4.1)
It is known from the course of linear algebra that if the real parts are not equal to zerol 1 , l 2 the original system (4.4) with the help of transformations (4.11) can always be transformed to the canonical form (4.10) and its behavior on the phase plane can be studiedξ , η . Consider the various cases that may present themselves here.
Roots λ 1 , λ 2 – valid and of the same sign
In this case, the transformation coefficients are real, we move from the real planex,yto the real plane ξ, η. Dividing the second of equations (4.10) by the first, we obtain:
.(4.12)
Integrating this equation, we find:
Where .(4.13)
Let us agree to understand by λ 2 the root of the characteristic equation with a large modulus, which does not violate the generality of our reasoning. Then, since in the case under consideration the roots λ 1 , λ2 – valid and of the same sign,a>1 , and we are dealing with integral curves of parabolic type.
All integral curves (except for the axis η , which corresponds to ) touch at the origin of the axis ξ, which is also an integral curve of equation (4.11). The origin of coordinates is a singular point.
Let us now find out the direction of motion of the representative point along the phase trajectories. If λ 1 , λ 2 are negative, then, as can be seen from equations (4.10), |ξ|, |η| decrease over time. The representing point approaches the origin, but never reaches it. Otherwise, this would contradict Cauchy's theorem, which states that only one phase trajectory passes through each point of the phase plane.
Such a singular point through which integral curves pass, just as a family of parabolas ![]() passes through the origin, is called a node (Fig. 4.5)
passes through the origin, is called a node (Fig. 4.5)
Knot-type equilibrium state at λ 1 , λ 2 < 0 is stable according to Lyapunov, since the representing point moves along all integral curves towards the origin of coordinates. This is stable knot. If λ 1 , λ 2 > 0, then |ξ|, |η| increase with time and the representative point moves away from the origin. In this case, the singular point– unstable node .
On the phase plane x, y the general qualitative character of the behavior of the integral curves will remain, but the tangents to the integral curves will not coincide with the coordinate axes. The angle of inclination of these tangents will be determined by the ratio of the coefficients α , β , γ , δ in equations (4.11).
Roots λ 1 , λ 2 are valid and have different signs.
Convert from coordinates x,y to coordinates ξ, η again real. The equations for the canonical variables again have the form (4.10), but now the signs λ 1 , λ 2 different. The phase trajectory equation has the form:
Where , (4.14)
Integrating (4.14), we find
(4.15)
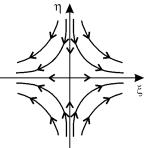
This is equation defines a family of curves of hyperbolic type, where both coordinate axes are the asymptotes (at a=1 we would have a family of isosceles hyperbolas). The coordinate axes are also integral curves in this case– these will be the only integral curves passing through the origin. Eachof which consists of three phase trajectories: of two movements towards a state of equilibrium (or away from a state of equilibrium) and from a state of equilibrium. All other integral curves– are hyperbolas that do not pass through the origin (Fig. 4.6) This singular point is called "saddle ». The level lines near the mountain saddle behave like phase trajectories in the vicinity of the saddle.
Let us consider the nature of the motion of the representative point along phase trajectories near the equilibrium state. Let, for example,λ 1 >0 , λ 2<0 . Then the representative point placed on the axis ξ , will move away from the origin, and placed on the axis η – will indefinitely approach the origin of coordinates, without reaching it in finite time. Wherever the representing point is at the initial moment (with the exception of the singular point and points on the asymptote η =0), it will eventually move away from the equilibrium state, even if at the beginning it moves along one of the integral curves towards a singular point.
It's obvious that saddle-type singular point is always unstable . Only under specially chosen initial conditions on the asymptoteη =0 the system will approach a state of equilibrium. However, this does not contradict the assertion that the system is unstable. If you count, that all initial states of the system on the phase plane are equally probable, then the probability of such an initial state that corresponds to movement in the direction to singular point is equal to zero. Therefore, any real movement will remove the system from the state of equilibrium.Going back to coordinatesx,y,we get the same qualitative picture of the nature of the movement of trajectories around the origin.
The boundary between the considered cases of a node and a saddle is the case when one of the characteristic indicators, for example λ 1 , vanishes, which occurs when the determinant of the system- expression adbc=0(see formula 4.8 ). In this case, the coefficients of the right-hand sides of equations (4.4) are proportional to each other:
and the system has for its equilibrium states all points of the line:
The remaining integral curves are a family of parallel lines with a slope , along which the representative points either approach the equilibrium state or move away from it, depending on the sign of the second root of the characteristic equation λ 2 = a+d.(Fig.4. 7 ) In this case, the coordinates of the equilibrium state depend on the initial value of the variables.

Roots λ 1 , λ 2 – complexconjugate
In this case, for realx and y we will have complex conjugates ξ , η (4.10) . However, by introducing one more intermediate transformation, it is also possible in this case to reduce the consideration to a real linear homogeneous transformation. Let's put:
![]() (4.16)
(4.16)
where a, b, and u, v – real values. It can be shown that the transformation fromx,y to u,v is, under our assumptions, real, linear, homogeneous with a non-zero determinant. Due to the equations(4.10, 4.16) we have :

where
 (4.17)
(4.17)
Dividing the second of the equations by the first, we get:
![]()
which is easier to integrate, if we switch to the polar coordinate system (r, φ ) . After substitution we get from where:
.(4.18)
Thus, on the phase planeu, vwe are dealing with a family of logarithmic spirals, each of which hasasymptotic point at the origin.Singular point which is the asymptotic point of all integral curves having the form of spirals, nested friend infriend, called focus ( fig.4.8 ) .

Let us consider the nature of the movement of the representing point along the phase trajectories. Multiplying the first of equations (4.17) byu, and the second to v and adding , we get:
Where
Let be a 1 < 0 (a 1 = Reλ ) . The representing point then continuously approaches the origin without reaching it in a finite time. This means that the phase trajectories are twisting spirals and correspond to damped oscillations variables. This is - steady focus .
In the case of a stable focus, as in the case of a stable node, not only the Lyapunov condition is satisfied, but also a more stringent requirement. Namely, for any initial deviations, the system will eventually return as close as desired to the equilibrium position. Such stability, in which the initial deviations not only do not increase, but decay, tending to zero, is called absolute stability .
If in the formula (4.18) a 1 >0 , then the representing point moves away from the origin, and we are dealing with unstable focus . When moving from a planeu, vto the phase planex, yspirals will also remain spirals, but will be deformed.
Consider now the case whena 1
=0
. Phase trajectories on the planeu, vthere will be circles ![]() which on the planex,yfit ellipses:
which on the planex,yfit ellipses:
Thus, ata 1=0 through a special pointx= 0,y= 0 no integral curve passes. Such an isolated singular point, near which the integral curves are closed curves, in particular, ellipses embedded in each other and enclosing the singular point, is called a center.
Thus, six types of equilibrium are possible, depending on the nature of the roots of the characteristic equation (4.7). View of phase trajectories on the plane x, y for these six cases is shown in Fig. 4.9.

Rice. 4.9.Types of phase portraits in the neighborhood of a stationary state for the system of linear equations (4.4).
The five types of equilibrium states are rough, their nature does not change with sufficiently small changes in the right-hand sides of equations (4.4). In this case, the changes should be small not only in the right-hand sides, but also in their first-order derivatives. The sixth state of equilibrium - the center - is not coarse. With small changes in the parameters of the right side of the equations, it goes into a stable or unstable focus.
Bifurcation diagram
Let us introduce the notation:
 .
(4.11)
.
(4.11)
Then the characteristic equation can be written in the form:
![]() .
(4.12)
.
(4.12)
Consider a plane with rectangular Cartesian coordinates s , D and mark on it the areas corresponding to one or another type of equilibrium state, which is determined by the nature of the roots of the characteristic equation
![]() .(4.13)
.(4.13)
The condition for the stability of the equilibrium state will be the presence of a negative real part of yl 1 and l 2 . A necessary and sufficient condition for this is the fulfillment of the inequalitiess > 0, D > 0 . On the diagram (4.15), this condition corresponds to the points located in the first quarter of the parameter plane. The singular point will be the focus ifl 1 and l 2 complex. This condition corresponds to those points of the plane for which , those. points between two branches of a parabolas 2 = 4 D. Semiaxis points s = 0, D>0, correspond to equilibrium states of the center type. Likewise,l 1 and l 2 - valid, but different signs, i.e. a singular point will be a saddle if D<0, etc. As a result, we get a partition diagram of the parameter plane s, D, into regions corresponding to different types of equilibrium states.

Rice. 4.10. Bifurcation diagram
for the system of linear equations 4.4
If the coefficients of the linear system a, b, c, d depend on some parameter, then when this parameter is changed, the values will also changes , D . When passing through the boundaries, the nature of the phase portrait changes qualitatively. Therefore, such boundaries are called bifurcation boundaries - on opposite sides of the boundary, the system has two topologically different phase portraits and, accordingly, two different types of behavior.
The diagram shows how such changes can take place. If we exclude special cases - the origin of coordinates - then it is easy to see that the saddle can go into a node, stable or unstable when crossing the y-axis. A stable node can either move to a saddle or a stable focus, and so on. Note that the stable node–stable focus and unstable node–unstable focus transitions are not bifurcational, since the topology of the phase space does not change in this case. We will talk in more detail about the topology of the phase space and bifurcation transitions in Lecture 6.
Under bifurcation transitions, the nature of the stability of the singular point changes. For example, a stable focus through the center can turn into an unstable focus. This bifurcation is called Andronov-Hopf bifurcation by the names of the scientists who studied it. With this bifurcation in nonlinear systems, a limit cycle is born, and the system becomes self-oscillating (see lecture 8).
Example. System of linear chemical reactions
Substance X flows in from the outside at a constant rate, turns into substance Y and at a rate proportional to the concentration of the substance Y, is taken out of the reaction sphere. All reactions are of the first order, with the exception of the influx of matter from the outside, which has a zero order. The reaction scheme looks like:
(4.14)
and is described by the system of equations:
 (4.15)
(4.15)
We obtain stationary concentrations by equating the right-hand sides to zero:
![]() .(4.16)
.(4.16)
Consider the phase portrait of the system. Let us divide the second equation of system (4.16) by the first one. We get:
![]() .(4.17)
.(4.17)
Equation (4.17) determines the behavior of variables on the phase plane. Let us construct a phase portrait of this system. First, we draw the main isoclines on the phase plane. Equation of the isocline of vertical tangents:
![]()
Equation for the isocline of horizontal tangents:
![]()
The singular point (stationary state) lies at the intersection of the principal isoclines.
Now let us determine at what angle the coordinate axes intersect the integral curves.
If a x= 0, then .
Thus, the tangent of the slope of the tangent to the integral curves y=y(x), crossing the y-axis x=0, is negative in the upper half-plane (recall that the variables x, y have concentration values, and therefore we are only interested in the upper right quadrant of the phase plane). In this case, the value of the tangent of the angle of inclination of the tangent increases with distance from the origin.
Consider the axis y= 0. At the intersection of this axis, the integral curves are described by the equation
At the tangent of the slope of the integral curves crossing the abscissa axis is positive and increases from zero to infinity with increasing x.
At .
Then, with a further increase, the tangent of the slope decreases in absolute value, remaining negative and tends to -1 at x ® ¥ . Knowing the direction of the tangents to the integral curves on the main isoclines and on the coordinate axes, it is easy to construct the entire picture of phase trajectories.
 |
|

The nature of the stability of the singular point will be established using the Lyapunov method. The characteristic determinant of the system has the form:
![]() .
.
Expanding the determinant, we obtain the characteristic equation of the system: , i.e. the roots of the characteristic equation are both negative. Therefore, the stationary state of the system is a stable node. At the same time, the concentration of the substance X tends to a stationary state always monotonically, the concentration of the substance Y can pass through min or max. Oscillatory regimes in such a system are impossible.
Taylor series serve as an effective tool for studying functions that are analytic in the circle zol To study functions that are analytic in an annular region, it turns out that it is possible to construct expansions in positive and negative powers (z - zq) of the form that generalizes Taylor expansions. The series (1), understood as the sum of two series, is called the Laurent series. It is clear that the region of convergence of series (1) is the common part of the regions of convergence of each of the series (2). Let's find her. The area of convergence of the first series is a circle whose radius is determined by the Cauchy-Hadamard formula Inside the circle of convergence, series (3) converges to an analytic function, and in any circle of smaller radius, it converges absolutely and uniformly. The second series is a power series with respect to the variable. The series (5) converges within its circle of convergence to the analytic function of the complex variable m-*oo, and in any circle of smaller radius it converges absolutely and uniformly, which means that the region of convergence of the series (4) is the appearance of the circle - If then there is a common region of convergence of the series (3) and (4) - a circular ring in which the series (1) converges to an analytic function. Moreover, in any ring, it converges absolutely and uniformly. Example 1. Determine the region of convergence of the rad Laurent series Isolated singular points and their classification (z), which is single-valued and apolitical in a circular ring, can be represented in this ring as the sum of a convergent series whose coefficients Cn are uniquely determined and calculated by the formulas where 7p is a circle of radius m Let us fix an arbitrary point z inside the ring R We construct circles with centers at the point r whose radii satisfy the inequalities and consider a new ring. According to the Cauchy integral theorem for a multiply connected domain, we have Let us transform each of the integrals in the sum (8) separately. For all points £ along the circle 7d*, the relation de the sum of a uniformly convergent series 1 1 is satisfied. Therefore, the fraction ^ can be represented in vi- /" / In a somewhat different way, for all points ξ on the circle ir> we have the relation Therefore, the fraction ^ can be represented as the sum of a uniformly convergent series in formulas (10) and (12) are analytic functions in a circular ring. Therefore, by Cauchy's theorem, the values of the corresponding integrals do not change if the circles 7/r and 7r/ are replaced by any circle. This allows us to combine formulas (10) and (12). Replacing the integrals on the right side of formula (8) with their expressions (9) and (11), respectively, we obtain the desired expansion. Since z is an arbitrary point of the ring, it follows that the series ( 14) converges to the function f(z) everywhere in this ring, and in any ring the series converges to this function absolutely and uniformly. Let us now prove that the decomposition of the form (6) is unique. Assume that one more decomposition takes place. Then, everywhere inside the ring R, we have On the circumference, the series (15) converge uniformly. Multiply both sides of the equality (where m is a fixed integer, and integrate both series term by term. As a result, we get on the left side, and on the right side - Csh. Thus, (4, \u003d St. Since m is an arbitrary number, then the last equality series (6), whose coefficients are calculated by formulas (7), is called the Laurent series of the function f(z) in the ring 7) for the coefficients of the Laurent series are rarely used in practice, because, as a rule, they require cumbersome calculations. Usually, if possible, ready-made Taylor expansions of elementary functions are used. Based on the uniqueness of the expansion, any legitimate method leads to the same result. Example 2 Consider the Laurent series expansions of functions of different domains, assuming that Fuiscius /(r) has two singular points: Therefore, there are three ring domains and, centered at the point r = 0. in each of which the function f(r) is analytic: a) the circle is the circle's exterior (Fig. 27). Let us find the Laurent expansions of the function /(z) in each of these regions. We represent /(z) as a sum of elementary fractions a) Circle Transform relation (16) as follows Using the formula for the sum of terms of a geometric progression, we obtain b) The ring for the function -z remains convergent in this ring, since Series (19) for the function j^j for |z| > 1 diverges. Therefore, we transform the function /(z) as follows: applying formula (19) again, we obtain that This series converges for. Substituting the expansions (18) and (21) into relation (20), we obtain c) The exteriority of the circle for the function -z with |z| > 2 diverges, and series (21) for the function Let us represent the function /(z) in the following form: /<*> Using formulas (18) and (19), we obtain OR 1 This example shows that for the same function f(z) the Laurent expansion, generally speaking, has a different form for different rings. Example 3. Find the decomposition of the 8 Laurent series of the function Laurent series Isolated singular points and their classification in the annular region A We use the representation of the function f (z) in the following form: and transform the second term Using the formula for the sum of the terms of a geometric progression, we obtain Substituting the found expressions into the formula (22), we have Example 4. Expand the function in a Laurent series in the neighborhood of thin zq = 0. For any complex one, we have Let This expansion is valid for any point z Ф 0. In this case, the annular region is the entire complex plane with one thrown out point z - 0. This region can be defined by the following relationship: This function is analytic in the region From formulas (13) for the coefficients of the Laurent series, by the same reasoning as in the previous paragraph, one can obtain the Kouiw inequalities. if the function f(z) is bounded on a circle, where M is a constant), then isolated singular points A point zo is called an isolated singular point of the function f(z) if there exists an annular neighborhood of the point (this set is sometimes also called a punctured neighborhood of the point 2o), in where the function f(z) is single-valued and analytic. At the point zo itself, the function is either not defined or is not single-valued and analytic. Three types of singular points are distinguished depending on the behavior of the function /(z) when approaching the point zo. An isolated singular point is said to be: 1) removable if there exists a finite 2) pmusach if 3) an essentially singular point if the function f(z) has no limit for Theorem 16. An isolated singular point z0 of a function f(z) is a removable singular point if and only if the Laurent expansion of the function f(z) in a neighborhood of the point zo does not contain a principal part, i.e., has the form Let zo - removable singular point. Then there exists a finite one, and hence the function f(z) is bounded in a procological neighborhood of the point r. We set By virtue of the Cauchy inequalities Since it is possible to choose ρ as small as we like, then all the coefficients at negative powers (z - 20) are equal to zero: Conversely, let the Laurent the expansion of the function /(r) in a neighborhood of the point zq contains only the correct part, i.e., it has the form (23) and, consequently, is Taylor. It is easy to see that for z -* z0 the function /(r) has a limit value: Theorem 17. An isolated singular point zq of the function f(z) is removable if and only if the function J(z) is bounded in some punctured neighborhood of the point zq, Zgmechai not. Let r0 be a removable singular point of f(r). Assuming we get that the function f(r) is analytic in some circle centered at the point th. This defines the name of the point - disposable. Theorem 18. An isolated singular point zq of a function f(z) is a pole if and only if the main part of the Laurent expansion of the function f(z) in a neighborhood of the point contains a finite (and positive) number of non-zero terms, i.e., has the form 4 Let z0 be a pole. Since then there exists a punctured neighborhood of the point z0 in which the function f(z) is analytic and nonzero. Then an analytic function is defined in this neighborhood and Hence, the point zq is a removable singular point (zero) of the function or where h(z) is an analytic function, h(z0) ∩ 0. is analytic in a neighborhood of the point zq, and hence, whence we obtain that Let us now assume that the function f(z) has a decomposition of the form (24) in a punctured neighborhood of the point zo. This means that in this neighborhood the function f(z) is analytic together with the function. For the function g(z), the expansion is valid from which it is clear that zq is a removable singular point of the function g(z) and exists Then the function tends at 0 - the pole of the function There is one more simple fact. The point Zq is a pole of the function f(z) if and only if the function g(z) = y can be extended to an analytic function in a neighborhood of the point zq by setting g(z0) = 0. The order of the pole of the function f(z) is called the order of zero of function jfa. Theorems 16 and 18 imply the following assertion. Theorem 19. An isolated singular thin is essentially singular if and only if the principal part of the Laurent expansion in a punctured neighborhood of this point contains infinitely many nonzero terms. Example 5. The singular point of the function is zo = 0. We have Laurent Series Isolated singular points and their classification Therefore, zo = 0 is a removable singular point. The expansion of the function /(z) in a Laurent series in the vicinity of the zero point contains only the correct part: Example7. f(z) = The singular point of the function f(z) is zq = 0. Consider the behavior of this function on the real and imaginary axes: on the real axis at x 0, on the imaginary axis Therefore, neither finite nor infinite limit f(z) at z -* 0 does not exist. Hence the point r0 = 0 is an essentially singular point of the function f(z). Let us find the Laurent expansion of the function f(z) in a neighborhood of the zero point. For any complex C we have We set. Then the Laurent expansion contains an infinite number of terms with negative powers of z.
singular point in mathematics. 1) Singular point of the curve given by the equation F ( x, y) = 0, - point M 0 ( x 0 , y 0), in which both partial derivatives of the function F ( x, y) vanish: If, in addition, not all second partial derivatives of the function F ( x, y) at the point M 0 are equal to zero, then O. t. is called double. If, along with the vanishing of the first derivatives at the point M 0, all the second derivatives vanish, but not all the third derivatives are equal to zero, then the O. t. is called triple, and so on. When studying the structure of a curve near a double O. t., an important role is played by the sign of the expression If Δ > 0, then the O. t. is called isolated; for example, the curve y 2 - x 4 + 4x 2= 0 the origin is an isolated O. t. (see rice. one
). If Δ x 2 + y 2 + a 2) 2 - 4a 2 x 2 - a 4= 0 the origin of coordinates is the nodal O. t. (see rice. 2
). If Δ = 0, then the O. t. curve is either isolated or characterized by the fact that different branches of the curve have a common tangent at this point, for example: tangent and form a point, like a curve y 2 - x 3= 0 (see rice. 3
, a); b) cusp of the 2nd kind - different branches of the curve are located on the same side of the common tangent, like a curve
(y - x 2)2 - x 5= 0 (see rice. 3
, b); c) point of self-contact (for a curve y 2 - x 4= 0 origin is a point of self-contact; (cm. rice. 3
, in). Along with the specified O. t. there are many other O. t. with special names; for example, an asymptotic point is the apex of a spiral with an infinite number of turns (see Fig. rice. 4
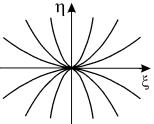
), break point, corner point, etc. 2) A singular point of a differential equation is a point at which both the numerator and denominator of the right side of the differential equation vanish simultaneously (See Differential Equations) where P and Q are continuously differentiable functions. Assuming O. t. located at the origin of coordinates and using the Taylor formula (See Taylor formula), we can represent equation (1) in the form where P 1 ( x, y) and Q 1 ( x, y) are infinitesimal with respect to Namely, if λ 1 ≠ λ 2 and λ 1 λ 2 > 0 or λ 1 = λ 2, then O. t. is a node; all integral curves passing through points of a sufficiently small neighborhood of the node enter it. If λ 1 ≠ λ 2 and λ 1 λ 2 i β, α ≠ 0 and β ≠ 0, then O. t. is a focus; all integral curves passing through points in a sufficiently small neighborhood of the focus are spirals with an infinite number of turns in any arbitrarily small neighborhood of the focus. If, finally, λ 1,2 = ± iβ, β ≠ 0, then the character of O. t. is not determined by linear terms in expansions of P ( x, y) and Q ( x, y), as was the case in all the above cases; here O. t. can be a focus or center, or it can have a more complex character. In the neighborhood of the center, all integral curves are closed and contain the center inside them. So, for example, the point (0, 0) is a node for the equations at" = 2u/x(λ 1 = 1, λ 2 = 2; see rice. 5
, a) and y" = u/x(λ 1 = λ 2 = 1; see rice. 5
, b), a saddle for the equation y" = -y/x(λ 1 = -1, λ 2 = 1 ; cm. rice. 6
), the focus for the equation y" =(x + y) /
(x - y) (λ 1 = 1 - i, λ 2 = 1 + i; cm. rice. 7
) and the center for the equation y" = -x / y(λ 1 = -i, λ 2 = i; cm. rice. eight
). If x, y) and Q ( x, y) are analytic, the neighborhood of an O. t. of higher order can be divided into regions: D 1 - filled with integral curves, both ends of which are included in the O. t. (elliptic regions), D 2 - filled with integral curves, one end of which is included in the O. t. (parabolic regions), and D 3 - regions bounded by two integral curves included in the O. t., between which there are integral curves of the type of hyperbolas (hyperbolic regions) (see. rice. nine
). If there are no integral curves entering into an O. point, then the O. point is called a point of stable type. The neighborhood of a stable O. t. consists of closed integral curves containing O. t. inside themselves, between which spirals are located (see Fig. rice. ten
). The study of O. t. differential equations, that is, in essence, the study of the behavior of families of integral curves in a neighborhood of O. t. M. Lyapunov a, A. Poincaré and others). 3) A singular point of a single-valued analytic function is a point at which the function's analyticity is violated (see Analytic functions). If there is a neighborhood of O. t. a, free from other O. t., then the point a is called isolated O. t. If a is an isolated O. t. and there exists a finite a is called a removable O. t. f(a)= b, it is possible to achieve a will become an ordinary point of the corrected function. For example, dot z= 0 is a removable O.T. for the function f 1 ( z) = f(z), if z≠ 0, and f 1(0),=1, dot z= 0 is an ordinary point [ f 1 (z) is analytic at the point z= 0]. If a a- isolated O. t. and a is called a pole or an inessentially singular point of the function f(z), if the Laurent series) functions f(z) in a neighborhood of an isolated O. t. does not contain negative powers z - a, if a- removable O. t., contains a finite number of negative powers z - a, if a- pole (in this case, the order of the pole R is defined as the highest power of a - an essentially singular point. For example, for the function dot z= 0 is the pole of the order R, for the function dot z= 0 is an essential singular point. On the boundary of the circle of convergence of a power series there must be at least one O. m. of the function represented inside this circle by the given power series. All boundary points of the domain of existence of a single-valued analytic function (natural boundary) are boundary points of this function. Thus, all points of the unit circle | z| = 1 are special to the function For a multi-valued analytic function, the concept of "O. t." more difficult. In addition to the O. t., in separate sheets of the Riemann surface of a function (that is, the O. t. of single-valued analytic elements), any branch point is also an O. t. of the function. Isolated branch points of a Riemann surface (i.e., branch points such that in some of their neighborhoods there are no other O.t. functions in any leaf) are classified as follows. If a is an isolated branch point of finite order and there exists a finite a, it is called a critical pole. If a a is an isolated branch point of infinite order and a is called a transcendental O. t. All other isolated branch points are called critical essentially singular points. Examples: dot z= 0 is an ordinary critical point of the function f ( z) = log z and a critical essential singular point of the function f (z) = sin log z. Any O. t., except for a removable one, is an obstacle to analytic continuation, i.e., analytic continuation along a curve passing through an irremovable O. t. is impossible. Great Soviet Encyclopedia. - M.: Soviet Encyclopedia.
1969-1978
.

![]()
![]()
 p = 2, 3, …)
p = 2, 3, …)









See what "Special Point" is in other dictionaries:
Points here. See also singular point (differential equations). A feature or singularity in mathematics is a point at which a mathematical object (usually a function) is not defined or has irregular behavior (for example, a point at which ... ... Wikipedia
An analytic function is a point at which the conditions of analyticity are violated. If an analytic function f(z) is defined in some neighborhood of the point z0 everywhere … Physical Encyclopedia
An analytic function is the point at which the analyticity of a function is violated ... Big Encyclopedic Dictionary
singular point- — [Ya.N. Luginsky, M.S. Fezi Zhilinskaya, Yu.S. Kabirov. English Russian Dictionary of Electrical Engineering and Power Industry, Moscow, 1999] Electrical engineering topics, basic concepts EN singular point ... Technical Translator's Handbook
1) An OT of an analytic function f(z) is an obstacle to the analytic continuation of an element of the function f(z) of a complex variable z along some path on the plane of this variable. Let the analytic function f(z) be defined by some ... ... Mathematical Encyclopedia
An analytic function, the point at which the function's analyticity is violated. * * * SINGULAR POINT A SINGULAR POINT of an analytic function, a point at which the function's analyticity is violated ... encyclopedic Dictionary
singular point- ypatingasis taškas statusas T sritis automatika atitikmenys: engl. singular point vok. singularer Punkt, m rus. singular point, fpranc. point particle, m; point singulier, m … Automatikos terminų žodynas
singular point- ypatingasis taškas statusas T sritis fizika atitikmenys: engl. singular point vok. singularer Punkt, m rus. singular point, fpranc. point singulier, m … Fizikos terminų žodynas
Basic concepts and definitions:
The zero of the analytic function f(z) is the point “a” for which f(a)=0.
The zero of order “n” of the function f(z) is the point “a” if but fn(a)¹0.
A singular point "a" is called an isolated singular point of the function f(z) if there exists a neighborhood of this point where there are no singular points other than "a".
Isolated singular points are of three types: .
1 removable special points;
3 essential singular points.
The type of the singular point can be determined based on the behavior of the given function at the found singular point, as well as from the form of the Laurent series obtained for the function in the vicinity of the found singular point.
Determining the type of a singular point by the behavior of the function in it.
1. Removable Singular Points.
An isolated singular point a of the function f(z) is called removable if there exists a finite limit .
2. Poles.
An isolated singular point a of the function f(z) is called a pole if ![]() .
.
3. Significant singular points.
An isolated singular point a of a function f(z) is called an essential singular point if neither finite nor infinite exists.
The following relation takes place between the zeros and poles of the function.
For a point a to be a pole of order n of the function f(Z), it is necessary and sufficient that this point be a zero of order n for the function .
If n=1 the pole is called simple.
Definition: An isolated singular point of a single-valued character is called:
a) removable if the main part of the decomposition is absent;
b) a pole if the main part contains a finite number of members;
c) an essentially singular point if the main part contains an infinite number of terms.
a) Thus, in a neighborhood of a removable singular point, the expansion has the form:
it expresses the function at all points of the circle |z-a| At the center z=a, the equality is false, because the function at z=a has a discontinuity, and the right side is continuous. If the value of the function in the center is changed, taking it equal to the value of the right side, then the gap will be eliminated - hence the name - removable. b) In the neighborhood of a pole of order m, the Laurent series expansion has the form: c) In the neighborhood of a simple pole Deductions and formulas for their calculation. The residue of an analytic function f(z) at an isolated singular point z 0 is a complex number equal to the value of the integral The residue of the function f(z) at an isolated singular point z 0 is denoted by the symbol Res f(z 0) or Res (f(z); z 0). Thus, Resf(z0)= If we put n=-1 in the formula (22.15.1), then we get: C-1= or Res f(z 0)= C -1 , those. the residue of the function f(z) with respect to the singular point z 0 is equal to the coefficient of the first term with a negative exponent in the expansion of the function f(z) in a Laurent series. Calculation of deductions. Regular or removable singular points. Obviously, if z=z 0 is a regular or removable singular point of the function f(z), then Res f(z 0)=0 (there is no principal part in the Laurent decomposition in these cases, so c-1=0). Pole. Let the point z 0 be a simple pole of the function f(z). Then the Laurent series for the function f(z) in a neighborhood of the point z 0 has the form: From here Therefore, passing in this equality to the limit as z --z 0 , we obtain Res f(z0)= Essentially special point. If the point z 0 is an essentially singular point of the function f(z), then to calculate the residue of the function at this point, one usually directly determines the coefficient c-1 in the expansion of the function in a Laurent series. Event classification. Sum, product of events, their properties, graphical representation. Events are divided into: 1. Random 2. Credible 3. Impossible Reliable - this is an event that necessarily occurs in these conditions (night is followed by morning). Random is an event that may or may not occur (passing an exam). The impossible is an event that will not occur under the given conditions (get a green pencil out of the box with only red ones). , taken in the positive direction along the circle L centered at the point z 0 , which lies in the region of analyticity of the function f(z) (i.e., in the ring 0<|z-z0| . (22.15.1)
, taken in the positive direction along the circle L centered at the point z 0 , which lies in the region of analyticity of the function f(z) (i.e., in the ring 0<|z-z0| . (22.15.1)

![]()
 Two heads and six legs; four walk, and two lie still
Two heads and six legs; four walk, and two lie still Self-esteem - what is it: concept, structure, types and levels
Self-esteem - what is it: concept, structure, types and levels Cassandra's Path, or Pasta Adventures War on Earth and Underground
Cassandra's Path, or Pasta Adventures War on Earth and Underground