Які сили діють у русі математичного маятника. Таємниці маятника
Математичним маятникомназивають матеріальну точку, підвішену на невагомій і нерозтяжній нитці, прикріпленої до підвісу і сили тяжіння (або іншої сили), що знаходиться в полі.
Досліджуємо коливання математичного маятника в інерційній системі відліку, щодо якої точка його підвісу перебуває у спокої чи рухається рівномірно прямолінійно. Силою опору повітря нехтуватимемо (ідеальний математичний маятник). Спочатку маятник спочиває в положенні рівноваги С. При цьому сила тяжіння і сила пружності F?ynp, що діють на нього, взаємно компенсуються.
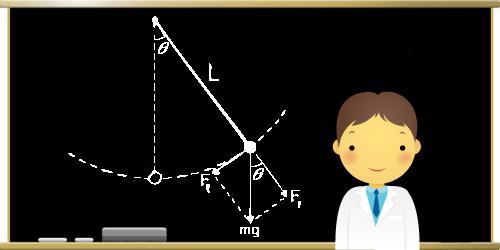
Виведемо маятник із положення рівноваги (відхиливши його, наприклад, у положення А) і відпустимо без початкової швидкості (рис. 1). У цьому випадку сили не врівноважують одна одну. Тангенційна складова сили тяжіння, діючи на маятник, повідомляє йому тангенційне прискорення a? (яка складає повного прискорення, спрямована вздовж дотичної до траєкторії руху математичного маятника), і маятник починає рухатися до положення рівноваги зі швидкістю, що зростає по модулю. Тангенційна складова сили тяжіння є, таким чином, силою, що повертає. Нормальна складова сили тяжіння спрямована вздовж нитки проти сили пружності. Равнодіюча сил і повідомляє маятнику нормальне прискорення , яке змінює у своїй напрям вектора швидкості, і маятник рухається дугою ABCD.

Чим ближче підходить маятник до положення рівноваги, тим менше стає значення тангенціальної складової . У положенні рівноваги вона дорівнює нулю, а швидкість досягає максимального значення, і маятник рухається інерцією далі, піднімаючись по дузі вгору. При цьому складова спрямована проти швидкості. Зі збільшенням кута відхилення модуль сили збільшується, а модуль швидкості зменшується, і в точці D швидкість маятника стає рівною нулю. Маятник на мить зупиняється, а потім починає рухатись у зворотному напрямку до положення рівноваги. Знову пройшовши його за інерцією, маятник, сповільнюючи рух, сягне точки А (тертя відсутня), тобто. зробить повне коливання. Після цього рух маятника повторюватиметься вже описаної послідовності.
Отримаємо рівняння, що описує вільні коливання математичного маятника.
Нехай маятник у час перебуває у точці У. Його зміщення S від положення рівноваги у цей час дорівнює довжині дуги СВ (тобто. S = |СВ|). Позначимо довжину нитки підвісу l, а масу маятника – m.
З малюнка 1 видно, що , де . При малих кутах () відхилення маятника
Знак мінус у цій формулі ставлять тому, що тангенціальна складова сили тяжіння спрямована до положення рівноваги, а зсув відраховують від рівноваги.
Згідно з другим законом Ньютона. p align="justify"> Спроектуємо векторні величини цього рівняння на напрям дотичної до траєкторії руху математичного маятника
З цих рівнянь отримаємо
Динамічне рівняння руху математичного маятника. Тангенціальне прискорення математичного маятника пропорційне його зміщенню та спрямоване до положення рівноваги. Це рівняння можна записати у вигляді
![]()
Порівнюючи його з рівнянням гармонійних коливань ![]() , можна дійти невтішного висновку, що математичний маятник здійснює гармонійні коливання. Оскільки розглянуті коливання маятника відбувалися під впливом лише внутрішніх сил, це були вільні коливання маятника. Отже, вільні коливання математичного маятника за малих відхилень є гармонійними.
, можна дійти невтішного висновку, що математичний маятник здійснює гармонійні коливання. Оскільки розглянуті коливання маятника відбувалися під впливом лише внутрішніх сил, це були вільні коливання маятника. Отже, вільні коливання математичного маятника за малих відхилень є гармонійними.
Позначимо
![]()
Циклічна частота коливань маятника.
Період коливань маятника. Отже,
Цей вираз називають формулою Гюйгенса. Воно визначає період вільних коливань математичного маятника. З формули слід, що з малих кутах відхилення від положення рівноваги період коливань математичного маятника:
- не залежить від його маси та амплітуди коливань;
- пропорційний кореню квадратному із довжини маятника і обернено пропорційний кореню квадратному із прискорення вільного падіння.
Це узгоджується з експериментальними законами малих коливань математичного маятника, відкриті Г. Галілеєм.
Підкреслимо, що цю формулу можна використовувати для розрахунку періоду за одночасного виконання двох умов:
- коливання маятника мають бути малими;
- точка підвісу маятника повинна лежати або рухатися рівномірно прямолінійно щодо інерційної системи відліку, в якій він знаходиться.
Якщо точка підвісу математичного маятника рухається з прискоренням, то при цьому змінюється сила натягу нитки, що призводить до зміни і сили, що повертає, а отже, частоти і періоду коливань. Як показують розрахунки, період коливань маятника у разі можна розрахувати за формулою
де - "ефективне" прискорення маятника у неінерційній системі відліку. Воно дорівнює геометричній сумі прискорення вільного падіння вектора, протилежного вектору , тобто. його можна розрахувати за формулою
Механічна система, яка складається з матеріальної точки (тіла), що висить на нерозтяжній невагомій нитці (її маса мізерно мала в порівнянні з вагою тіла) в однорідному полі тяжкості, називається математичним маятником (інша назва – осцилятор). Бувають інші види цього пристрою. Замість нитки можна використовувати невагомий стрижень. Математичний маятник може наочно розкрити суть багатьох цікавих явищ. При малій амплітуді коливання його рух називається гармонійним.
Загальні відомості про механічну систему
Формула періоду коливання цього маятника було виведено голландським ученим Гюйгенсом (1629-1695 рр.). Цей сучасник І. Ньютона дуже захоплювався цією механічною системою. У 1656 р. він створив перший годинник з маятниковим механізмом. Вони вимірювали час із винятковою для тих часів точністю. Цей винахід став найважливішим етапом у розвитку фізичних експериментів та практичної діяльності.
Якщо маятник знаходиться в положенні рівноваги (висить прямовисно), то врівноважуватиметься силою натягу нитки. Плоский маятник на нерозтяжній нитці є системою із двома ступенями свободи зі зв'язком. При зміні лише одного компонента змінюються показники її частин. Так, якщо нитку замінити на стрижень, то дана механічна система матиме всього 1 ступінь свободи. Які ж властивості має математичний маятник? У цій простій системі під впливом періодичного обурення виникає хаос. У разі, коли точка підвісу не рухається, а робить коливання, у маятника з'являється нове положення рівноваги. При швидких коливаннях вгору-вниз ця механічна система набуває стійкого положення «вгору гальмами». Вона має і свою назву. Її називають маятником Капіци.
Властивості маятника

Математичний маятник має дуже цікаві властивості. Усі вони підтверджуються відомими фізичними законами. Період коливань будь-якого іншого маятника залежить від різних обставин, таких як розмір та форма тіла, відстань між точкою підвісу та центром тяжіння, розподіл маси щодо цієї точки. Саме тому визначення періоду тіла, що висить, є досить складним завданням. Набагато легше обчислюється період математичного маятника, формула якого буде наведена нижче. Внаслідок спостережень над подібними механічними системами можна встановити такі закономірності:
Якщо, зберігаючи однакову довжину маятника, підвішувати різні вантажі, то період їх коливань вийде однаковим, хоча їх маси сильно відрізнятимуться. Отже період такого маятника не залежить від маси вантажу.
Якщо при запуску системи відхиляти маятник на невеликі, але різні кути, то він коливатиметься з однаковим періодом, але за різними амплітудами. Поки відхилення від центру рівноваги не надто великі, коливання за своєю формою будуть досить близькі гармонійним. Період такого маятника не залежить від коливальної амплітуди. Ця властивість цієї механічної системи називається ізохронізмом (у перекладі з грецької «хронос» - час, «ізос» - рівний).
Період математичного маятника
Цей показник є періодом Незважаючи на складне формулювання, сам процес дуже простий. Якщо довжина нитки математичного маятника L, а прискорення вільного падіння g, то ця величина дорівнює:
Період малих власних коливань в жодному разі залежить від маси маятника і амплітуди коливань. У цьому випадку маятник рухається як математичний із наведеною довжиною.
Коливання математичного маятника

Математичний маятник здійснює коливання, які можна описати простим диференціальним рівнянням:
x + ω2 sin x = 0,
де х(t) – невідома функція (це кут відхилення від нижнього положення рівноваги в момент t, виражений у радіанах); ω – позитивна константа, яка визначається з параметрів маятника (ω = √g/L, де g – це прискорення вільного падіння, а L – довжина математичного маятника (підвіс).
Рівняння малих коливань поблизу положення рівноваги (гармонічне рівняння) виглядає так:
x + ω2 sin x = 0
Коливальні рухи маятника
Математичний маятник, який робить малі коливання, рухається синусоїдою. Диференціальне рівняння другого порядку відповідає всім вимогам та параметрам такого руху. Для визначення траєкторії необхідно задати швидкість та координату, з яких потім визначаються незалежні константи:
x = A sin (θ 0 + ωt),
де θ 0 - Початкова фаза, A - амплітуда коливання, ω - циклічна частота, що визначається з рівняння руху.
Математичний маятник (формули для великих амплітуд)
Ця механічна система, що робить свої коливання зі значною амплітудою, підпорядковується складнішим законам руху. Для такого маятника вони розраховуються за такою формулою:
sin x/2 = u * sn(ωt/u),
де sn - синус Якобі, який для u< 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
де ε = E/mL2 (mL2 – енергія маятника).
Визначення періоду коливання нелінійного маятника здійснюється за такою формулою:
де Ω = π/2 * ω/2K(u), K - еліптичний інтеграл, π - 3,14.

Рух маятника по сепаратрисі
Сепаратрисою називають траєкторію динамічної системи, яка має двовимірний фазовий простір. Математичний маятник рухається неперіодично. У нескінченно дальньому моменті часу він падає з крайнього верхнього положення у бік із нульовою швидкістю, потім поступово набирає її. Зрештою він зупиняється, повернувшись у вихідне становище.
Якщо амплітуда коливань маятника наближається до π Це говорить про те, що рух на фазовій площині наближається до сепаратриси. І тут під впливом малої змушує періодичної сили механічна система проявляє хаотичне поведінка.
При відхиленні математичного маятника від положення рівноваги з деяким кутом φ виникає дотична сила тяжкості Fτ = -mg sin φ. Знак «мінус» означає, що ця дотична складова прямує у протилежну від відхилення маятника сторону. При позначенні через зміщення маятника по дузі кола з радіусом L його кутове зміщення дорівнює φ = x/L. Другий закон призначений для проекцій та сили, дасть потрібне значення:
mg τ = Fτ = -mg sin x/L
Виходячи з цього співвідношення, видно, що цей маятник є нелінійною системою, оскільки сила, яка прагне повернути його в положення рівноваги, завжди пропорційна не зсуву x, а sin x/L.
Тільки тоді, коли математичний маятник здійснює малі коливання, він є гармонійним осцилятором. Іншими словами, він стає механічною системою, здатною виконувати гармонійні коливання. Таке наближення практично справедливе для кутів 15-20 °. Коливання маятника з великими амплітудами перестав бути гармонійним.
Закон Ньютона для малих коливань маятника

Якщо дана механічна система виконує малі коливання, 2-й закон Ньютона виглядатиме таким чином:
mg τ = Fτ = -m * g/L * x.
Виходячи з цього, можна зробити висновок, що математичного маятника пропорційно його зсуву зі знаком «мінус». Це і є умовою, завдяки якій система стає гармонійним осцилятором. Модуль коефіцієнта пропорційності між зміщенням та прискоренням дорівнює квадрату кругової частоти:
ω02 = g/L; ω0 = √g/L.
Ця формула відбиває власну частоту малих коливань цього виду маятника. Виходячи з цього,
T = 2π/ω0 = 2π√g/L.
Обчислення на основі закону збереження енергії
Властивості маятника можна описати за допомогою закону збереження енергії. При цьому слід враховувати, що маятника у полі тяжкості дорівнює:
E = mg∆h = mgL(1 - cos α) = mgL2sin2 α/2
Повна дорівнює кінетичній або максимальній потенційній: Epmax = Ekmsx = E
Після того як буде записано закон збереження енергії, беруть похідну від правої та лівої частин рівняння:
Оскільки похідна від постійних величин дорівнює 0, то (Ep + Ek)" = 0. Похідна суми дорівнює сумі похідних:
Ep" = (mg/L*x2/2)" = mg/2L*2x*x" = mg/L*v + Ek" = (mv2/2) = m/2(v2)" = m/2* 2v*v" = mv* α,
отже:
Mg/L*xv + mva = v (mg/L*x + mα) = 0.
З останньої формули знаходимо: α = - g/L*x.
Практичне застосування математичного маятника
Прискорення змінюється з географічною широтою, оскільки щільність земної кори по всій планеті однакова. Там, де залягають породи з більшою щільністю, воно буде дещо вищим. Прискорення математичного маятника часто застосовують для геологорозвідки. Його допомогою шукають різні корисні копалини. Просто підрахувавши кількість коливань маятника, можна знайти у надрах Землі кам'яне вугілля чи руду. Це пов'язано з тим, що такі копалини мають щільність і масу більше, ніж пухкі гірські породи, що лежать під ними.

Математичним маятником користувалися такі визначні вчені, як Сократ, Аристотель, Платон, Плутарх, Архімед. Багато хто з них вірив у те, що ця механічна система може впливати на долю і життя людини. Архімед використовував математичний маятник за свої обчислення. У наш час багато окультистів та екстрасенсів користуються цією механічною системою для здійснення своїх пророцтв або пошуку зниклих людей.
Відомий французький астроном і дослідник природи К. Фламмаріон для своїх досліджень також використовував математичний маятник. Він стверджував, що з його допомогою йому вдалося передбачити відкриття нової планети, появу Тунгуського метеориту та інші події. Під час Другої світової війни у Німеччині (м. Берлін) працював спеціалізований Інститут маятника. У наші дні подібними дослідженнями зайнятий Мюнхенський інститут парапсихології. Свою роботу з маятником співробітники цього закладу називають «радіестезією».
Математичний маятник- це матеріальна точка, підвішена на невагомій і нерозтяжній нитці, що у полі тяжкості Землі. Математичний маятник - це ідеалізована модель, що правильно описує реальний маятник лише за певних умов. Реальний маятник можна вважати математичним, якщо довжина нитки набагато більше розмірів підвішеного на ній тіла, маса нитки мізерна мала в порівнянні з масою тіла, а деформації нитки настільки малі, що їх взагалі можна знехтувати.
Коливальну систему у разі утворюють нитку, приєднане до неї тіло і Земля, без якої ця система не могла б служити маятником.
де а х – прискорення, g - прискорення вільного падіння, х- Зміщення, l- Довжина нитки маятника.
Це рівняння називається рівнянням вільних коливань математичного маятникаВоно правильно визначає аналізовані коливання лише тоді, коли виконані такі припущення:
2) розглядаються лише малі коливання маятника з невеликим кутом розмаху.
Вільні коливання будь-яких систем завжди описуються аналогічними рівняннями.
Причинами вільних коливань математичного маятника є:
1. Дія на маятник сили натягу та сили тяжіння, що перешкоджає його зміщенню з положення рівноваги і змушує його знову опускатися.
2. Інертність маятника, завдяки якій він, зберігаючи свою швидкість, не зупиняється в положенні рівноваги, а проходить через неї далі.
Період вільних коливань математичного маятника
Період вільних коливань математичного маятника залежить від його маси, а визначається лише довжиною нитки і прискоренням вільного падіння там, де знаходиться маятник.
Перетворення енергії при гармонійних коливаннях
При гармонійних коливаннях пружинного маятника відбуваються перетворення потенційної енергії пружно деформованого тіла на його кінетичну енергію, де k – коефіцієнт пружності, х -модуль зміщення маятника із положення рівноваги, m- Маса маятника, v- Його швидкість. Відповідно до рівняння гармонійних коливань:
![]() ,
,
![]() .
.
Повна енергія пружинного маятника:
![]() .
.
Повна енергія для математичного маятника:
![]()
У разі математичного маятника
Перетворення енергії при коливаннях пружинного маятника відбувайся відповідно до закону збереження механічної енергії ( ![]() ). При русі маятника вниз чи вгору від рівноваги його потенційна енергія збільшується, а кінетична - зменшується. Коли маятник проходить положення рівноваги ( х= 0), його потенційна енергія дорівнює нулю і кінетична енергія маятника має найбільше значення, що дорівнює його повній енергії.
). При русі маятника вниз чи вгору від рівноваги його потенційна енергія збільшується, а кінетична - зменшується. Коли маятник проходить положення рівноваги ( х= 0), його потенційна енергія дорівнює нулю і кінетична енергія маятника має найбільше значення, що дорівнює його повній енергії.
Таким чином, у процесі вільних коливань маятника його потенційна енергія перетворюється на кінетичну, кінетична на потенційну, потенційна потім знову на кінетичну і т. д. Але повна механічна енергія при цьому залишається незмінною.
Вимушені коливання. Резонанс.
Коливання, що відбуваються під дією зовнішньої періодичної сили, називаються вимушеними коливаннями. Зовнішня періодична сила, яка називається примушує, повідомляє коливальній системі додаткову енергію, яка йде на поповнення енергетичних втрат, що відбуваються через тертя. Якщо сила, що змушує, змінюється в часі за законом синуса або косинуса, то вимушені коливання будуть гармонійними і незагасаючими.
На відміну від вільних коливань, коли система отримує енергію лише один раз (при виведенні системи зі рівноваги), у разі вимушених коливань система поглинає цю енергію від джерела зовнішньої періодичної сили безперервно. Ця енергія заповнює втрати, що витрачаються на подолання тертя, і тому повна енергія коливальної системи, як і раніше, залишається незмінною.
Частота вимушених коливань дорівнює частоті сили, що змушує.. У разі коли частота примушує сили υ збігається з власною частотою коливальної системи υ 0 , відбувається різке зростання амплітуди вимушених коливань резонанс. Резонанс виникає через те, що при υ = υ 0 зовнішня сила, діючи в такт з вільними коливаннями, весь час спрямована зі швидкістю тіла, що коливається, і робить позитивну роботу: енергія тіла, що коливається, збільшується, і амплітуда його коливань стає великою. Графік залежності амплітуди вимушених коливань А т від частоти сили, що змушує υ представлений на малюнку, цей графік називається резонансною кривою:

Явище резонансу грає велику роль у ряді природних, наукових та виробничих процесів. Наприклад, необхідно враховувати явище резонансу при проектуванні мостів, будівель та інших споруд, що зазнають вібрації під навантаженням, інакше за певних умов ці споруди можуть бути зруйновані.
Маятники, зображені на рис. 2, являють собою протяжні тіла різної форми та розмірів, що здійснюють коливання біля точки підвісу або опори. Такі системи називаються фізичними маятниками. У стані рівноваги, коли центр ваги знаходиться на вертикалі під точкою підвісу (або опори), сила тяжіння врівноважується (через пружні сили деформованого маятника) реакцією опори. При відхиленні з положення рівноваги сила тяжкості та пружні сили визначають у кожний момент часу кутове прискорення маятника, тобто визначають характер руху (коливання). Ми розглянемо тепер динаміку коливань докладніше на найпростішому прикладі так званого математичного маятника, який є грузиком малого розміру, підвішений на довгій тонкій нитці.
У математичному маятнику ми можемо знехтувати масою нитки і деформацією грузика, т. е. можемо вважати, що маса маятника зосереджена грузику, а пружні сили зосереджені нитки, яку вважають нерастяжимой. Подивимося тепер, під дією яких сил відбувається коливання нашого маятника після того, як він у будь-який спосіб (поштовхом, відхиленням) виведений із положення рівноваги.
Коли маятник лежить у положенні рівноваги, то сила тяжіння, що діє на його грузик і спрямована вертикально вниз, врівноважується силою натягу нитки. У відхиленому положенні (рис. 15) сила тяжіння діє під кутом до сили натягу, спрямованої вздовж нитки. Розкладемо силу тяжіння на дві складові: у напрямку нитки () і перпендикулярно до нього (). При коливаннях маятника сила натягу нитки дещо перевищує складову - на величину доцентрової сили, яка змушує вантаж рухатися дугою. Складова завжди спрямована у бік положення рівноваги; вона хіба що прагне відновити це становище. Тому її часто називають силою, що повертає. По модулю тим більше, що більше відхилений маятник.

Рис. 15. Повертаюча сила у разі відхилення маятника від положення рівноваги
Отже, як тільки маятник при своїх коливаннях починає відхилятися від положення рівноваги, скажімо, праворуч, з'являється сила, що уповільнює його рух тим сильнішим, чим далі він відхилений. Зрештою ця сила його зупинить і спричинить положення рівноваги. Однак у міру наближення до цього положення сила ставатиме дедалі менше і в самому положенні рівноваги обернеться в нуль. Таким чином, через положення рівноваги маятник проходить за інерцією. Як тільки він почне відхилятися вліво, знову з'явиться сила, що зростає зі збільшенням відхилення, але тепер уже спрямована вправо. Рух вліво знову сповільнюватиметься, потім маятник на мить зупиниться, після чого почнеться прискорений рух праворуч і т.д.
Що відбувається з енергією маятника за його коливань?
Двічі протягом періоду - при найбільших відхиленнях вліво і вправо- маятник зупиняється, тобто в ці моменти швидкість дорівнює нулю, а отже, дорівнює нулю та кінетична енергія. Зате саме в ці моменти центр ваги маятника піднято на найбільшу висоту і, отже, найбільша потенційна енергія. Навпаки, у моменти проходження через положення рівноваги потенційна енергія найменша, а швидкість та кінетична енергія досягають найбільшого значення.
Ми припустимо, що силами тертя маятника повітря і тертям у точці підвісу можна знехтувати. Тоді за законом збереження енергії ця найбільша кінетична енергія якраз дорівнює надлишку потенційної енергії в положенні найбільшого відхилення над потенційною енергією в положенні рівноваги.
Отже, при коливаннях маятника відбувається періодичний перехід кінетичної енергії в потенційну і назад, причому період цього процесу вдвічі коротший за період коливань самого маятника. Однак повна енергія маятника (сума потенційної та кінетичної енергій) постійно постійна. Вона дорівнює тій енергії, яка була повідомлена маятнику при пуску, байдуже - у вигляді потенційної енергії (початкове відхилення) або у вигляді кінетичної (початковий поштовх).
Така справа при будь-яких коливаннях без тертя або будь-яких інших процесів, що відбирають енергію у коливальної системи або повідомляють їй енергію. Саме тому амплітуда зберігається незмінною і визначається початковим відхиленням чи силою поштовху.
Ті самі зміни сили, що повертає, і такий же перехід енергії ми отримаємо, якщо замість підвішування кульки на нитці змусимо її кататися у вертикальній площині у сферичній чашці або в вигнутому по колу жолобі. У цьому випадку роль натягу нитки візьме на себе тиск стінок чашки або жолоба (тертям кульки об стінки і повітря ми знову нехтуємо).
Математичний маятник – це модель звичайного маятника. Під математичним маятником розуміється матеріальна точка, яка підвішена на довгій невагомій і нерозтяжній нитці.
Виведемо кульку з положення рівноваги і відпустимо. На кульку діятимуть дві сили: сила тяжіння та сила натягу нитки. Під час руху маятника, на нього ще діятиме сила тертя повітря. Але ми вважатимемо її дуже маленькою.
Розкладемо силу тяжіння на дві складові: силу, спрямовану вздовж нитки, і силу спрямовану перпендикулярно до траєкторії руху кульки.
Ці дві сили становитимуть у сумі силу тяжкості. Сили пружності нитки та складова сили тяжіння Fn повідомляють кульці доцентрове прискорення. Робота цих сил дорівнюватиме нулю, і отже вони лише змінюватимуть напрям вектора швидкості. У будь-який момент часу він буде спрямований по дотичній до дуги кола.
Під дією складової сили тяжіння Fτ кулька рухатиметься по дузі кола з швидкістю, що наростає по модулю. Значення цієї сила завжди змінюється за модулем, при проходженні положення рівноваги вона дорівнює нулю.
Динаміка коливального руху
Рівняння руху тіла, що коливається під дією сили пружності.
Загальне рівняння руху:
Коливання в системі відбуваються під дією сили пружності, яка згідно із законом Гука прямо пропорційна зміщенню вантажу
Тоді рівняння руху кульки набуде наступного вигляду:
Розділимо це рівняння на m, отримаємо таку формулу:
Оскільки маса і коефіцієнт пружності величини постійні, те й ставлення (-k/m) теж буде постійне. Ми отримали рівняння, що описують коливання тіла під дією сили пружності.
Проекція прискорення тіла буде прямо пропорційна його координаті, взятій із протилежним знаком.
Рівняння руху математичного маятника
Рівняння руху математичного маятника описується такою формулою:
Це рівняння має такий самий вигляд, як і рівняння руху вантажу на пружині. Отже, коливання маятника та руху кульки на пружині відбуваються однаковим чином.
Зміщення кульки на пружині та зміщення тіла маятника від положення рівноваги змінюються згодом за однаковими законами.
 Дядько Ваня сюжет п'єси. "Дядя Ваня. Ставлення до професора оточуючих
Дядько Ваня сюжет п'єси. "Дядя Ваня. Ставлення до професора оточуючих Крихітка Цахес по прозвищу Циннобер
Крихітка Цахес по прозвищу Циннобер Майков, Аполлон Миколайович – коротка біографія
Майков, Аполлон Миколайович – коротка біографія