Hệ thức độc lập tuyến tính của định nghĩa vectơ. Sự phụ thuộc tuyến tính và sự độc lập tuyến tính của vectơ
Để cho được L- không gian tuyến tính tùy ý, a tôi Î L là các phần tử của nó (vectơ).
Định nghĩa 3.3.1. Biểu hiện , ở đâu , - số thực tùy ý, được gọi là kết hợp tuyến tính vectơ a 1, a 2,…, a N.
Nếu vectơ R = , sau đó họ nói rằng R bị phân hủy thành các vectơ a 1, a 2,…, a N.
Định nghĩa 3.3.2. Một tổ hợp tuyến tính của các vectơ được gọi là không tầm thường nếu trong số các số có ít nhất một số khác 0. Nếu không, kết hợp tuyến tính được gọi là không đáng kể.
Định nghĩa 3.3.3 . Các vectơ a 1, a 2,…, a Nđược gọi là phụ thuộc tuyến tính nếu tồn tại một tổ hợp tuyến tính không tầm thường của chúng sao cho
= 0 .
Định nghĩa 3.3.4. Các vectơ a 1, a 2,…, a Nđược gọi là độc lập tuyến tính nếu đẳng thức = 0 chỉ có thể nếu tất cả các số l 1, l 2,…, l nđồng thời bằng không.
Lưu ý rằng bất kỳ phần tử khác nào a 1 đều có thể được coi là một hệ độc lập tuyến tính, vì đẳng thức l a 1 = 0 chỉ có thể với điều kiện l= 0.
Định lý 3.3.1.Điều kiện cần và đủ cho sự phụ thuộc tuyến tính a 1, a 2,…, a N là khả năng phân hủy ít nhất một trong những nguyên tố này thành phần còn lại.
Bằng chứng. Nhu cầu. Cho các phần tử a 1, a 2,…, a N phụ thuộc tuyến tính. Nó có nghĩa là = 0 , và ít nhất một trong các số l 1, l 2,…, l n khác 0. Hãy để cho sự dứt khoát l 1 ¹ 0. Sau đó
tức là phần tử a 1 được phân tách thành các phần tử a 2, a 3,…, a N.
Tính đầy đủ. Cho phần tử a 1 được phân tách thành các phần tử a 2, a 3,…, a N, tức là a 1 =. sau đó ![]() = 0
, do đó, có một tổ hợp tuyến tính không tầm thường của các vectơ a 1, a 2,…, a N tương đương với 0
, vì vậy chúng phụ thuộc tuyến tính .
= 0
, do đó, có một tổ hợp tuyến tính không tầm thường của các vectơ a 1, a 2,…, a N tương đương với 0
, vì vậy chúng phụ thuộc tuyến tính .
Định lý 3.3.2. Nếu ít nhất một trong các phần tử a 1, a 2,…, a N 0, thì các vectơ này phụ thuộc tuyến tính.
Bằng chứng . Để cho được một N= 0 , sau đó = 0 , có nghĩa là sự phụ thuộc tuyến tính của các phần tử này.
Định lý 3.3.3. Nếu trong số n vectơ bất kỳ p (p< n) векторов линейно зависимы, то и все n элементов линейно зависимы.
Bằng chứng. Để xác định, các phần tử a 1, a 2,…, a P phụ thuộc tuyến tính. Điều này có nghĩa là có một tổ hợp tuyến tính không tầm thường để = 0 . Bình đẳng đã chỉ định sẽ được giữ nguyên nếu chúng ta thêm phần tử vào cả hai phần của nó. sau đó + = 0 , trong khi ít nhất một trong các số l 1, l 2,…, lp khác 0. Do đó, vectơ a 1, a 2,…, a N phụ thuộc tuyến tính.
Hệ quả 3.3.1. Nếu n phần tử độc lập tuyến tính thì k bất kỳ trong số chúng độc lập tuyến tính (k< n).
Định lý 3.3.4. Nếu các vectơ a 1, a 2,…, a N- 1 độc lập tuyến tính và các phần tử a 1, a 2,…, a N- 1, a n phụ thuộc tuyến tính, khi đó vectơ một n có thể được phân tách thành các vectơ a 1, a 2,…, a N- 1 .
Bằng chứng. Vì theo điều kiện 1, a 2 ,…, một N- 1, a N phụ thuộc tuyến tính, sau đó tồn tại một tổ hợp tuyến tính tầm thường của chúng = 0 và (nếu không, các vectơ a 1, a 2,…, a N- một). Nhưng sau đó vectơ
 ,
,
Q.E.D.
Nhiệm vụ 1. Tìm xem hệ các vectơ có độc lập tuyến tính hay không. Hệ thống các vectơ sẽ được xác định bởi ma trận của hệ thống, các cột trong đó bao gồm tọa độ của các vectơ.
 .
.
Quyết định.Để kết hợp tuyến tính  bằng không. Sau khi viết đẳng thức này trong các tọa độ, chúng ta thu được hệ phương trình sau:
bằng không. Sau khi viết đẳng thức này trong các tọa độ, chúng ta thu được hệ phương trình sau:
 .
.
Hệ phương trình như vậy được gọi là tam thức. Cô ấy có giải pháp duy nhất.  . Do đó các vectơ
. Do đó các vectơ  độc lập tuyến tính.
độc lập tuyến tính.
Nhiệm vụ 2. Tìm xem hệ các vectơ có độc lập tuyến tính hay không.
 .
.
Quyết định. Vectơ  là độc lập tuyến tính (xem Vấn đề 1). Hãy chứng minh rằng vectơ là tổ hợp tuyến tính của các vectơ
là độc lập tuyến tính (xem Vấn đề 1). Hãy chứng minh rằng vectơ là tổ hợp tuyến tính của các vectơ  . Hệ số mở rộng vectơ
. Hệ số mở rộng vectơ  được xác định từ hệ phương trình
được xác định từ hệ phương trình
 .
.
Hệ thống này, giống như một hệ thống tam giác, có một giải pháp duy nhất.
Do đó, hệ thức vectơ  phụ thuộc tuyến tính.
phụ thuộc tuyến tính.
Nhận xét. Các ma trận như trong bài toán 1 được gọi là hình tam giác và trong vấn đề 2 - bước tam giác . Câu hỏi về sự phụ thuộc tuyến tính của một hệ vectơ sẽ dễ dàng giải được nếu ma trận gồm các tọa độ của các vectơ này là tam giác bậc. Nếu ma trận không có dạng đặc biệt thì sử dụng biến đổi chuỗi cơ bản , bảo toàn các mối quan hệ tuyến tính giữa các cột, nó có thể được rút gọn thành dạng tam giác bậc.
Các phép biến đổi chuỗi cơ bản ma trận (EPS) được gọi là các phép toán sau trên ma trận:
1) hoán vị của các dòng;
2) nhân một chuỗi với một số khác 0;
3) thêm vào chuỗi một chuỗi khác, nhân với một số tùy ý.
Nhiệm vụ 3. Tìm hệ con độc lập tuyến tính cực đại và tính hạng của hệ vectơ
 .
.
Quyết định. Hãy để chúng tôi giảm ma trận của hệ thống với sự trợ giúp của EPS thành dạng tam giác bậc. Để giải thích thủ tục, dòng có số của ma trận được biến đổi sẽ được ký hiệu bằng ký hiệu. Cột sau mũi tên hiển thị các hành động được thực hiện trên các hàng của ma trận được chuyển đổi để thu được các hàng của ma trận mới.

 .
.
Rõ ràng, hai cột đầu tiên của ma trận kết quả là độc lập tuyến tính, cột thứ ba là tổ hợp tuyến tính của chúng và cột thứ tư không phụ thuộc vào hai cột đầu tiên. Vectơ  được gọi là cơ bản. Chúng tạo thành hệ thống con độc lập tuyến tính tối đa của hệ thống , và thứ hạng của hệ thống là ba.
được gọi là cơ bản. Chúng tạo thành hệ thống con độc lập tuyến tính tối đa của hệ thống , và thứ hạng của hệ thống là ba.
Cơ sở, tọa độ
Nhiệm vụ 4. Tìm cơ sở và tọa độ của vectơ trong cơ sở này trên tập các vectơ hình học có tọa độ thỏa mãn điều kiện  .
.
Quyết định. Tập hợp là một mặt phẳng đi qua gốc tọa độ. Một cơ sở tùy ý trên mặt phẳng bao gồm hai vectơ không thẳng hàng. Tọa độ của các vectơ trong cơ sở đã chọn được xác định bằng cách giải hệ phương trình tuyến tính tương ứng.
Có một cách khác để giải quyết vấn đề này, khi bạn có thể tìm thấy cơ sở bằng tọa độ.
Tọa độ  không gian không phải là tọa độ trên mặt phẳng, vì chúng được liên kết với nhau bằng quan hệ
không gian không phải là tọa độ trên mặt phẳng, vì chúng được liên kết với nhau bằng quan hệ  , tức là chúng không độc lập. Các biến độc lập và (chúng được gọi là tự do) xác định duy nhất vectơ trên mặt phẳng và do đó, chúng có thể được chọn làm tọa độ trong. Sau đó, cơ sở
, tức là chúng không độc lập. Các biến độc lập và (chúng được gọi là tự do) xác định duy nhất vectơ trên mặt phẳng và do đó, chúng có thể được chọn làm tọa độ trong. Sau đó, cơ sở  bao gồm các vectơ nằm trong và tương ứng với các tập hợp các biến tự do
bao gồm các vectơ nằm trong và tương ứng với các tập hợp các biến tự do  và
và  , I E .
, I E .
Nhiệm vụ 5. Tìm cơ sở và tọa độ của các vectơ trong cơ sở này trên tập tất cả các vectơ trong không gian mà tọa độ lẻ của chúng bằng nhau.
Quyết định. Như trong bài toán trước chúng ta chọn tọa độ trong không gian.
Như  , sau đó là các biến miễn phí
, sau đó là các biến miễn phí  xác định duy nhất một vectơ từ và do đó, là tọa độ. Cơ sở tương ứng bao gồm các vectơ.
xác định duy nhất một vectơ từ và do đó, là tọa độ. Cơ sở tương ứng bao gồm các vectơ.
Nhiệm vụ 6. Tìm cơ sở và tọa độ của vectơ trong cơ sở này trên tập hợp tất cả các ma trận có dạng  , ở đâu
, ở đâu  là các số tùy ý.
là các số tùy ý.
Quyết định. Mỗi ma trận từ có thể được biểu diễn duy nhất dưới dạng:
Mối quan hệ này là sự mở rộng của vectơ từ cơ sở  với tọa độ
với tọa độ  .
.
Nhiệm vụ 7. Tìm kích thước và cơ sở của nhịp tuyến tính của một hệ thống các vectơ
 .
.
Quyết định. Sử dụng EPS, chúng tôi biến đổi ma trận từ tọa độ của vectơ hệ thống sang dạng tam giác bậc.


 .
.
cột  của ma trận cuối cùng là độc lập tuyến tính và các cột
của ma trận cuối cùng là độc lập tuyến tính và các cột  được thể hiện tuyến tính thông qua chúng. Do đó các vectơ
được thể hiện tuyến tính thông qua chúng. Do đó các vectơ  hình thành cơ sở
hình thành cơ sở  , và
, và  .
.
Nhận xét. Cơ sở trong được chọn một cách mơ hồ. Ví dụ, vectơ  cũng tạo thành cơ sở
cũng tạo thành cơ sở  .
.
Được giới thiệu bởi chúng tôi các phép toán tuyến tính trên vectơ giúp bạn có thể tạo các biểu thức khác nhau cho số lượng vector và biến đổi chúng bằng cách sử dụng các thuộc tính được đặt cho các hoạt động này.
Dựa trên một tập hợp các vectơ a 1, ... và n cho trước, bạn có thể soạn một biểu thức có dạng
trong đó a 1, ..., và n là các số thực tùy ý. Biểu thức này được gọi là kết hợp tuyến tính của các vectơ a 1, ..., a n. Các số α i, i = 1, n, là hệ số kết hợp tuyến tính. Tập hợp các vectơ còn được gọi là hệ thống vector.
Liên quan đến khái niệm đã giới thiệu về tổ hợp tuyến tính của các vectơ, vấn đề nảy sinh là mô tả tập các vectơ có thể được viết dưới dạng tổ hợp tuyến tính của một hệ vectơ a 1, ..., a n cho trước. Ngoài ra, các câu hỏi về các điều kiện mà theo đó có biểu diễn của một vectơ ở dạng kết hợp tuyến tính và về tính duy nhất của biểu diễn như vậy, là điều đương nhiên.
Định nghĩa 2.1. Các vectơ a 1, ..., và n được gọi là phụ thuộc tuyến tính, nếu tồn tại một tập hợp các hệ số α 1, ..., α n sao cho
α 1 a 1 + ... + α n a n = 0 (2.2)
và ít nhất một trong các hệ số này khác không. Nếu bộ hệ số được chỉ định không tồn tại, thì các vectơ được gọi là độc lập tuyến tính.
Nếu α 1 = ... = α n = 0, thì rõ ràng, α 1 a 1 + ... + α n a n = 0. Với điều này, chúng ta có thể nói điều này: vectơ a 1, ..., và n độc lập tuyến tính nếu theo đẳng thức (2.2) mà tất cả các hệ số α 1, ..., α n đều bằng không.
Định lý sau đây giải thích tại sao khái niệm mới được gọi là thuật ngữ "phụ thuộc" (hay "độc lập"), và đưa ra một tiêu chí đơn giản cho sự phụ thuộc tuyến tính.
Định lý 2.1.Để các vectơ a 1, ..., và n, n> 1, phụ thuộc tuyến tính, cần và đủ rằng một trong số chúng là tổ hợp tuyến tính của các vectơ còn lại.
◄ Sự cần thiết. Giả sử rằng các vectơ a 1, ..., và n phụ thuộc tuyến tính. Theo định nghĩa 2.1 về phụ thuộc tuyến tính, trong đẳng thức (2.2) có ít nhất một hệ số khác 0 ở bên trái, ví dụ α 1. Để số hạng đầu tiên ở phía bên trái của dấu đẳng thức, chúng tôi chuyển phần còn lại sang phía bên phải, thay đổi dấu hiệu của chúng như bình thường. Chia hằng đẳng thức cho α 1, chúng ta nhận được
a 1 = -α 2 / α 1 ⋅ a 2 - ... - α n / α 1 ⋅ a n
những thứ kia. biểu diễn vectơ a 1 dưới dạng kết hợp tuyến tính của các vectơ còn lại a 2, ... và n.
Tính đầy đủ. Ví dụ, vectơ đầu tiên a 1 có thể được biểu diễn dưới dạng kết hợp tuyến tính của các vectơ còn lại: a 1 = β 2 a 2 + ... + β n a n. Chuyển tất cả các số hạng từ vế phải sang vế trái, ta được 1 - β 2 a 2 - ... - β n a n = 0, tức là kết hợp tuyến tính của các vectơ a 1, ..., và n với các hệ số α 1 = 1, α 2 = - β 2, ..., α n = - β n, bằng vectơ không. Trong sự kết hợp tuyến tính này, không phải tất cả các hệ số đều bằng không. Theo định nghĩa 2.1, các vectơ a 1, ..., và n phụ thuộc tuyến tính.
Định nghĩa và tiêu chí của sự phụ thuộc tuyến tính được xây dựng theo cách mà chúng ngụ ý sự hiện diện của hai hoặc nhiều vectơ. Tuy nhiên, người ta cũng có thể nói về sự phụ thuộc tuyến tính của một vectơ. Để nhận ra khả năng này, thay vì "vectơ phụ thuộc tuyến tính", chúng ta cần nói "hệ thống các vectơ phụ thuộc tuyến tính". Dễ dàng nhận thấy rằng biểu thức "hệ một véc tơ phụ thuộc tuyến tính" có nghĩa là véc tơ đơn này bằng không (chỉ có một hệ số trong tổ hợp tuyến tính và nó không được bằng không).
Khái niệm về sự phụ thuộc tuyến tính có một cách giải thích hình học đơn giản. Sự giải thích này được làm rõ bởi ba câu sau đây.
Định lý 2.2. Hai vectơ phụ thuộc tuyến tính nếu và chỉ khi chúng thẳng hàng.
◄ Nếu các vectơ a và b phụ thuộc tuyến tính, thì một trong số chúng, ví dụ a, được biểu diễn thông qua vectơ kia, tức là a = λb với một số thực λ. Theo định nghĩa 1.7 làm vectơ bằng một số, vectơ a và b thẳng hàng.
Bây giờ để các vectơ a và b thẳng hàng. Nếu cả hai đều bằng không, thì rõ ràng là chúng phụ thuộc tuyến tính, vì bất kỳ kết hợp tuyến tính nào của chúng đều bằng vectơ không. Cho một trong các vectơ này không bằng 0, ví dụ vectơ b. Biểu thị bằng λ tỷ lệ độ dài của các vectơ: λ = | а | / | b |. Các vectơ collinear có thể là một chiều hoặc hướng ngược nhau. Trong trường hợp sau, chúng ta thay đổi dấu của λ. Sau đó, kiểm tra Định nghĩa 1.7, chúng ta thấy rằng a = λb. Theo Định lý 2.1, các vectơ a và b phụ thuộc tuyến tính.
Nhận xét 2.1. Trong trường hợp hai vectơ, có tính đến tiêu chí phụ thuộc tuyến tính, định lý đã được chứng minh có thể được định dạng lại như sau: hai vectơ thẳng hàng nếu và chỉ khi một trong số chúng được biểu diễn dưới dạng tích của cái kia bằng một số. Đây là một tiêu chí thuận tiện cho tính thẳng hàng của hai vectơ.
Định lý 2.3. Ba vectơ phụ thuộc tuyến tính nếu và chỉ khi chúng đồng phẳng.
◄ Nếu ba vectơ a, b, c phụ thuộc tuyến tính thì theo Định lý 2.1, một trong số chúng, ví dụ a, là tổ hợp tuyến tính của các vectơ còn lại: a = βb + γс. Hãy kết hợp gốc của các vectơ b và c tại điểm A. Khi đó các vectơ βb, γc sẽ có một gốc chung tại điểm A và hình bình hành quy tắc tổng của chúng, những thứ kia. vectơ a, sẽ là vectơ có đầu A và chấm dứt, là đỉnh của một hình bình hành được xây dựng trên các vectơ tổng và. Do đó, tất cả các vectơ nằm trong cùng một mặt phẳng, tức là chúng đồng phẳng.
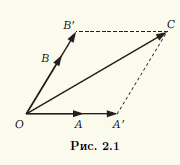
Cho các vectơ a, b, c là đồng phẳng. Nếu một trong những vectơ này bằng 0, thì rõ ràng nó sẽ là một tổ hợp tuyến tính của những vectơ khác. Nó đủ để lấy tất cả các hệ số của tổ hợp tuyến tính bằng không. Do đó, chúng ta có thể giả sử rằng cả ba vectơ đều không bằng không. Tương thích khởi đầu các vectơ này tại một điểm chung O. Gọi đầu của chúng lần lượt là các điểm A, B, C (Hình 2.1). Kẻ đường thẳng qua điểm C song song với đường thẳng đi qua cặp điểm O, A và O, B. Ký hiệu giao điểm của A "và B", ta được hình bình hành OA "CB", do đó OC "= OA" + OB ". Vectơ OA" và vectơ khác 0 a = OA thẳng hàng, và do đó, vectơ thứ nhất có thể nhận được bằng cách nhân số thứ hai với số thực α: OA "= αOA. Tương tự, OB" = βOB, β ∈ R. Kết quả là ta thu được OC "= α OA + βOB, tức là vectơ c là tổ hợp tuyến tính của các vectơ a và b. Theo Định lý 2.1, các vectơ a, b, c phụ thuộc tuyến tính.
Định lý 2.4. Bốn vectơ bất kỳ đều phụ thuộc tuyến tính.
◄ Chứng minh tuân theo sơ đồ tương tự như trong Định lý 2.3. Xét bốn vectơ a, b, c và d tùy ý. Nếu một trong bốn vectơ bằng 0, hoặc có hai vectơ thẳng hàng trong số chúng, hoặc ba trong bốn vectơ là đồng phẳng, thì bốn vectơ này phụ thuộc tuyến tính. Ví dụ, nếu vectơ a và b thẳng hàng, thì chúng ta có thể lập tổ hợp tuyến tính của chúng αa + βb = 0 với các hệ số khác 0, rồi thêm hai vectơ còn lại vào tổ hợp này, lấy các số không làm hệ số. Chúng ta nhận được một tổ hợp tuyến tính của bốn vectơ bằng 0, trong đó có các hệ số khác không.
Do đó, chúng ta có thể giả định rằng trong số bốn vectơ đã chọn không có vectơ nào rỗng, không có vectơ nào thẳng hàng và không có vectơ nào là đồng phẳng. Ta chọn điểm O là điểm đầu chung của chúng, khi đó điểm cuối của các vectơ a, b, c, d sẽ là một số điểm A, B, C, D (Hình 2.2). Qua điểm D ta vẽ ba mặt phẳng song song với các mặt phẳng ОВС, OCA, OAB và gọi A ", B", С "lần lượt là giao điểm của các mặt phẳng này với các đường thẳng OA, OB, OS, ta được một hình bình hành. OA "C" B "C" B "DA" và các vectơ a, b, c nằm trên các cạnh của nó đi ra khỏi đỉnh O. Vì tứ giác OC "DC" là hình bình hành nên OD = OC "+ OC ". Đoạn thẳng OS" là một đường chéo của hình bình hành OA "C" B ", do đó OC" = OA "+ OB", và OD = OA "+ OB" + OC ".

Cần lưu ý rằng các cặp vectơ OA ≠ 0 và OA ", OB ≠ 0 và OB", OC ≠ 0 và OC "thẳng hàng và do đó, chúng ta có thể chọn các hệ số α, β, γ sao cho OA" = αOA, OB "= βOB và OC" = γOC. Cuối cùng, chúng ta nhận được OD = αOA + βOB + γOC. Do đó, vectơ OD được biểu thị theo ba vectơ còn lại và cả bốn vectơ, theo Định lý 2.1, đều phụ thuộc tuyến tính.
Hệ thức các vectơ được gọi là phụ thuộc tuyến tính, nếu có các số như vậy, trong đó có ít nhất một số khác 0, thì bằng nhau https://pandia.ru/text/78/624/images/image004_77.gif "width =" 57 "height =" 24 src = ">.
Nếu đẳng thức này chỉ đúng nếu tất cả, thì hệ thống các vectơ được gọi là độc lập tuyến tính.
Định lý. Hệ thống các vectơ sẽ phụ thuộc tuyến tính nếu và chỉ khi ít nhất một trong các vectơ của nó là tổ hợp tuyến tính của các vectơ khác.
ví dụ 1Đa thức ![]() là sự kết hợp tuyến tính của các đa thức https://pandia.ru/text/78/624/images/image010_46.gif "width =" 88 height = 24 "height =" 24 ">. Đa thức tạo thành một hệ độc lập tuyến tính, vì Đa thức https: //pandia.ru/text/78/624/images/image012_44.gif "width =" 129 "height =" 24 ">.
là sự kết hợp tuyến tính của các đa thức https://pandia.ru/text/78/624/images/image010_46.gif "width =" 88 height = 24 "height =" 24 ">. Đa thức tạo thành một hệ độc lập tuyến tính, vì Đa thức https: //pandia.ru/text/78/624/images/image012_44.gif "width =" 129 "height =" 24 ">.
Ví dụ 2 Hệ thống ma trận, https://pandia.ru/text/78/624/images/image016_37.gif "width =" 51 "height =" 48 src = "> là độc lập tuyến tính, vì kết hợp tuyến tính bằng ma trận 0 chỉ trong khi https://pandia.ru/text/78/624/images/image019_27.gif "width =" 69 "height =" 21 ">, https://pandia.ru/text/78/ 624 /images/image022_26.gif "width =" 40 "height =" 21 "> phụ thuộc tuyến tính.
Quyết định.
Soạn kết hợp tuyến tính của các vectơ này https://pandia.ru/text/78/624/images/image023_29.gif "width =" 97 "height =" 24 "> = 0..gif" width = "360" height = "22">.
Cân bằng các tọa độ cùng tên của các vectơ bằng nhau, chúng ta nhận được https://pandia.ru/text/78/624/images/image027_24.gif "width =" 289 "height =" 69 ">
Cuối cùng chúng tôi nhận được
 và
và
Hệ thống có một nghiệm nhỏ duy nhất, vì vậy tổ hợp tuyến tính của các vectơ này chỉ bằng 0 nếu tất cả các hệ số đều bằng không. Do đó, hệ vectơ này độc lập tuyến tính.
Ví dụ 4 Các vectơ là độc lập tuyến tính. Hệ thức của vectơ sẽ là gì
một).![]() ;
;
b).![]() ?
?
Quyết định.
một). Soạn một kết hợp tuyến tính và cân bằng nó bằng 0
Sử dụng các thuộc tính của phép toán với vectơ trong không gian tuyến tính, chúng tôi viết lại đẳng thức cuối cùng dưới dạng
Vì các vectơ là độc lập tuyến tính nên các hệ số của phải bằng 0, tức là ...gif "width =" 12 "height =" 23 src = ">
Hệ phương trình kết quả có một nghiệm nhỏ nhất ![]() .
.
Vì bình đẳng (*) chỉ được thực thi tại https://pandia.ru/text/78/624/images/image031_26.gif "width =" 115 height = 20 "height =" 20 "> - độc lập tuyến tính;
b). Soạn đẳng thức https://pandia.ru/text/78/624/images/image039_17.gif "width =" 265 "height =" 24 src = "> (**)
Áp dụng lý luận tương tự, chúng tôi nhận được
Giải hệ phương trình bằng phương pháp Gauss, ta được
 hoặc
hoặc
Hệ thống cuối cùng có vô số nghiệm https://pandia.ru/text/78/624/images/image044_14.gif "width =" 149 "height =" 24 src = ">. Do đó, có một không tập hợp các hệ số mà bằng nhau (**)
. Do đó, hệ thức vectơ ![]() là phụ thuộc tuyến tính.
là phụ thuộc tuyến tính.
Ví dụ 5 Hệ thống vectơ là độc lập tuyến tính và hệ thống vectơ phụ thuộc tuyến tính..gif "width =" 80 "height =" 24 ">. Gif" width = "149 height = 24" height = "24"> (***)
Bình đẳng (***) . Thật vậy, hệ thống sẽ phụ thuộc tuyến tính.
Từ mối quan hệ (***)
chúng tôi nhận được ![]() hoặc
hoặc ![]() Chứng tỏ
Chứng tỏ ![]() .
.
Mắc phải ![]()
Nhiệm vụ cho giải pháp độc lập (trong lớp học)
1. Một hệ thống chứa một vectơ không phụ thuộc tuyến tính.
2. Hệ thống vectơ đơn một, phụ thuộc tuyến tính nếu và chỉ khi, a = 0.
3. Một hệ thống bao gồm hai vectơ phụ thuộc tuyến tính khi và chỉ khi các vectơ đó tỷ lệ với nhau (nghĩa là một trong số chúng nhận được từ vectơ kia bằng cách nhân với một số).
4. Nếu một vectơ được thêm vào một hệ phụ thuộc tuyến tính, thì một hệ phụ thuộc tuyến tính sẽ thu được.
5. Nếu một vectơ bị loại bỏ khỏi một hệ độc lập tuyến tính, thì hệ thống thu được các vectơ là độc lập tuyến tính.
6. Nếu hệ thống Sđộc lập tuyến tính, nhưng trở nên phụ thuộc tuyến tính khi một vectơ được thêm vào b, sau đó là vectơ bđược biểu thị tuyến tính theo các vectơ của hệ thống S.
c). Hệ thống ma trận, trong không gian ma trận bậc hai.
10. Cho hệ thức vectơ một,b,c không gian vectơ là độc lập tuyến tính. Chứng minh tính độc lập tuyến tính của các hệ vectơ sau:
một).a +b, b, c.
b).a +https://pandia.ru/text/78/624/images/image062_13.gif "width =" 15 "height =" 19 "> - số lượng tùy ý
c).a +b, a + c, b + c.
11. Để cho được một,b,c là ba vectơ trong mặt phẳng có thể được sử dụng để tạo thành một tam giác. Các vectơ này sẽ phụ thuộc tuyến tính?
12. Cho hai vectơ a1 = (1, 2, 3, 4),a2 = (0, 0, 0, 1). Chọn thêm hai vectơ 4D a3 vàa4để hệ thống a1,a2,a3,a4độc lập tuyến tính .
Sự phụ thuộc tuyến tính và sự độc lập tuyến tính của vectơ.
Cơ sở của vectơ. Hệ tọa độ Affine
Có một chiếc xe đẩy với sôcôla dành cho khán giả, và hôm nay mỗi du khách sẽ nhận được một cặp đôi ngọt ngào - hình học phân tích với đại số tuyến tính. Bài viết này sẽ đề cập đến hai phần của toán học cao hơn cùng một lúc và chúng ta sẽ xem cách chúng hòa hợp với nhau trong một trình bao bọc. Nghỉ ngơi đi, ăn Twix! ... chết tiệt, tốt, tranh luận vô nghĩa. Dù không sao nhưng cuối cùng thì mình sẽ không ghi điểm đâu, cuối cùng thì cũng nên có thái độ học tập tích cực.
Sự phụ thuộc tuyến tính của vectơ, độc lập tuyến tính của vectơ, cơ sở vectơ và các thuật ngữ khác không chỉ có một cách diễn giải hình học, mà trên hết, một ý nghĩa đại số. Khái niệm "vectơ" theo quan điểm của đại số tuyến tính khác xa với vectơ "thông thường" mà chúng ta có thể mô tả trên một mặt phẳng hoặc trong không gian. Bạn không cần phải tìm kiếm bằng chứng xa, hãy thử vẽ một vector không gian năm chiều ![]() . Hoặc véc tơ thời tiết, mà tôi vừa đi đến Gismeteo: - nhiệt độ và áp suất khí quyển, tương ứng. Tất nhiên, ví dụ này không chính xác theo quan điểm của các thuộc tính của không gian vectơ, nhưng, tuy nhiên, không ai cấm việc chính thức hóa các tham số này dưới dạng một vectơ. Hơi thở của mùa thu ...
. Hoặc véc tơ thời tiết, mà tôi vừa đi đến Gismeteo: - nhiệt độ và áp suất khí quyển, tương ứng. Tất nhiên, ví dụ này không chính xác theo quan điểm của các thuộc tính của không gian vectơ, nhưng, tuy nhiên, không ai cấm việc chính thức hóa các tham số này dưới dạng một vectơ. Hơi thở của mùa thu ...
Không, tôi sẽ không làm bạn buồn về lý thuyết, không gian vectơ tuyến tính, nhiệm vụ là hiểu khôngđịnh nghĩa và định lý. Các thuật ngữ mới (phụ thuộc tuyến tính, độc lập, kết hợp tuyến tính, cơ sở, v.v.) có thể áp dụng cho tất cả các vectơ theo quan điểm đại số, nhưng các ví dụ sẽ được đưa ra về mặt hình học. Do đó, mọi thứ đều đơn giản, dễ tiếp cận và trực quan. Ngoài các bài toán của hình học giải tích, chúng ta cũng sẽ xem xét một số nhiệm vụ điển hình của đại số. Để nắm vững tài liệu, nên làm quen với các bài học Vectơ cho hình nộm và Làm thế nào để tính định thức?
Sự phụ thuộc tuyến tính và tính độc lập của vectơ mặt phẳng.
Cơ sở mặt phẳng và hệ tọa độ affine
Xem xét mặt phẳng của bàn máy tính của bạn (chỉ là bàn, bàn cạnh giường, sàn nhà, trần nhà, bất cứ thứ gì bạn thích). Nhiệm vụ sẽ bao gồm các hành động sau:
1) Chọn cơ sở máy bay. Nói một cách đại khái, mặt bàn có chiều dài và chiều rộng, do đó trực quan rõ ràng rằng cần phải có hai vectơ để xây dựng cơ sở. Một vectơ rõ ràng là không đủ, ba vectơ là quá nhiều.
2) Dựa trên cơ sở đã chọn thiết lập hệ tọa độ(lưới tọa độ) để gán tọa độ cho tất cả các mục trên bảng.
Đừng ngạc nhiên, lúc đầu những lời giải thích sẽ được trên đầu ngón tay. Hơn nữa, trên của bạn. Vui lòng đặt ngón trỏ của bàn tay trái trên mép của mặt bàn để anh ta nhìn vào màn hình. Đây sẽ là một vectơ. Bây giờ đặt chỗ ngón út của bàn tay phải trên cạnh của bảng theo cách tương tự - sao cho nó hướng vào màn hình điều khiển. Đây sẽ là một vectơ. Cười lên, trông bạn thật tuyệt! Có thể nói gì về vectơ? Vectơ dữ liệu thẳng hàng, nghĩa là tuyến tính thể hiện qua nhau:
, tốt, hoặc ngược lại:, ở đâu là một số khác 0.
Bạn có thể xem hình ảnh của hành động này trong bài. Vectơ cho hình nộm, nơi tôi đã giải thích quy tắc nhân một vectơ với một số.
Các ngón tay của bạn có đặt cơ sở trên mặt phẳng của bàn máy tính không? Rõ ràng là không. Các vectơ thẳng hàng di chuyển qua lại trong một mình hướng, trong khi một mặt phẳng có chiều dài và chiều rộng.
Các vectơ như vậy được gọi là phụ thuộc tuyến tính.
Thẩm quyền giải quyết: Các từ "tuyến tính", "tuyến tính" biểu thị thực tế là không có bình phương, lập phương, lũy thừa khác, logarit, sin, v.v. trong phương trình toán học, biểu thức. Chỉ có các biểu thức tuyến tính (bậc 1) và các phụ thuộc.
Hai vectơ mặt phẳng phụ thuộc tuyến tính nếu và chỉ khi chúng thẳng hàng.
Chéo các ngón tay của bạn trên bàn sao cho có bất kỳ góc nào giữa chúng ngoại trừ 0 hoặc 180 độ. Hai vectơ mặt phẳngtuyến tính không phải phụ thuộc nếu và chỉ khi chúng không thẳng hàng. Vì vậy, cơ sở được nhận. Không cần phải xấu hổ rằng cơ sở hóa ra là "xiên" với các vectơ không vuông góc với các độ dài khác nhau. Rất nhanh, chúng ta sẽ thấy rằng không chỉ một góc 90 độ là phù hợp với cấu trúc của nó, và không chỉ các vectơ đơn vị có độ dài bằng nhau
Không tí nào vector máy bay cách duy nhất mở rộng về cơ sở: ![]() , đâu là số thực. Các con số được gọi là tọa độ vector trong cơ sở này.
, đâu là số thực. Các con số được gọi là tọa độ vector trong cơ sở này.
Họ cũng nói rằng vectơtrình bày dưới dạng kết hợp tuyến tính vectơ cơ sở. Đó là, biểu thức được gọi là phân hủy vectornền tảng hoặc kết hợp tuyến tính vectơ cơ sở.
Ví dụ, người ta có thể nói rằng một vectơ được mở rộng trong cơ sở trực chuẩn của mặt phẳng, hoặc người ta có thể nói rằng nó được biểu diễn dưới dạng tổ hợp tuyến tính của các vectơ.
Hãy xây dựng định nghĩa cơ sở chính thức: cơ sở máy bay là một cặp vectơ độc lập tuyến tính (không tuyến tính), , trong đó không tí nào véc tơ mặt phẳng là một tổ hợp tuyến tính của các véc tơ cơ sở.
Điểm cốt yếu của định nghĩa là thực tế rằng các vectơ được lấy theo một thứ tự nhất định. căn cứ ![]() Đây là hai cơ sở hoàn toàn khác nhau! Như người ta nói, ngón út của bàn tay trái không thể di chuyển đến vị trí của ngón út của bàn tay phải.
Đây là hai cơ sở hoàn toàn khác nhau! Như người ta nói, ngón út của bàn tay trái không thể di chuyển đến vị trí của ngón út của bàn tay phải.
Chúng tôi đã tìm ra cơ sở, nhưng vẫn chưa đủ để thiết lập lưới tọa độ và gán tọa độ cho từng mục trên bàn máy tính của bạn. Tại sao không đủ? Các vectơ là tự do và đi lang thang trên toàn bộ mặt phẳng. Vậy làm cách nào để bạn gán tọa độ cho những dấu chấm nhỏ trên bàn bẩn thỉu còn sót lại từ một ngày cuối tuần hoang dã? Một điểm khởi đầu là cần thiết. Và một điểm quy chiếu như vậy là một điểm quen thuộc với mọi người - gốc tọa độ. Tìm hiểu hệ tọa độ:
Tôi sẽ bắt đầu với hệ thống "trường học". Đã có trong bài học giới thiệu Vectơ cho hình nộm Tôi đã nêu bật một số điểm khác biệt giữa hệ tọa độ hình chữ nhật và cơ sở trực chuẩn. Đây là hình ảnh tiêu chuẩn:

Khi nói về Hệ toạ độ hình chữ nhật, thì chúng thường có nghĩa là gốc, trục tọa độ và tỷ lệ dọc theo các trục. Hãy thử gõ “hệ tọa độ hình chữ nhật” trong công cụ tìm kiếm, và bạn sẽ thấy rằng nhiều nguồn sẽ cho bạn biết về các trục tọa độ quen thuộc từ lớp 5 đến lớp 6 và cách vẽ các điểm trên mặt phẳng.
Mặt khác, người ta có ấn tượng rằng một hệ tọa độ hình chữ nhật có thể được xác định rõ ràng về cơ sở trực chuẩn. Và nó gần như là như vậy. Từ ngữ diễn ra như thế này:
nguồn gốc, và chính thống bộ cơ sở Hệ tọa độ Descartes của mặt phẳng . Đó là, một hệ tọa độ hình chữ nhật chắc chắnđược xác định bởi một điểm duy nhất và hai vectơ trực giao đơn vị. Đó là lý do tại sao, bạn thấy hình vẽ mà tôi đã đưa ra ở trên - trong các bài toán hình học, cả vectơ và trục tọa độ thường được vẽ (nhưng không phải lúc nào cũng vậy).
Tôi nghĩ rằng mọi người đều hiểu điều đó với sự trợ giúp của một điểm (điểm gốc) và một cơ sở chính tắc ĐIỂM BẤT KỲ của mặt phẳng và BẤT KỲ VECTƠ nào của mặt phẳng tọa độ có thể được chỉ định. Nói một cách hình tượng, "mọi thứ trên máy bay đều có thể được đánh số."
Các vectơ tọa độ có phải là đơn vị không? Không, chúng có thể có độ dài khác 0 tùy ý. Xét một điểm và hai vectơ trực giao có độ dài khác 0 tùy ý:

Cơ sở như vậy được gọi là trực giao. Gốc tọa độ với vectơ xác định lưới tọa độ, và bất kỳ điểm nào của mặt phẳng, bất kỳ vectơ nào cũng có tọa độ riêng theo cơ sở đã cho. Ví dụ, hoặc. Điều bất tiện rõ ràng là các vectơ tọa độ nói chung có độ dài khác nhau ngoài sự thống nhất. Nếu độ dài bằng một, thì cơ sở chính tắc thông thường sẽ nhận được.
! Ghi chú : trong cơ sở trực giao, cũng như bên dưới trong cơ sở afin của mặt phẳng và không gian, các đơn vị dọc theo trục được coi là ĐIỀU KIỆN. Ví dụ: một đơn vị dọc theo hoành độ chứa 4 cm, một đơn vị dọc theo hoành độ chứa 2 cm. Thông tin này đủ để chuyển đổi tọa độ “không chuẩn” thành “cm thông thường của chúng tôi” nếu cần.
Và câu hỏi thứ hai, thực sự đã được trả lời - góc giữa các vectơ cơ sở có nhất thiết phải bằng 90 độ không? Không! Như định nghĩa đã nói, vectơ cơ sở phải là chỉ không thẳng hàng. Theo đó, góc có thể là bất kỳ thứ gì ngoại trừ 0 và 180 độ.
Một điểm trên máy bay được gọi là nguồn gốc, và không thẳng hàng vectơ, , đặt hệ tọa độ affine của mặt phẳng :

Đôi khi hệ tọa độ này được gọi là xiên hệ thống. Các điểm và vectơ được thể hiện như các ví dụ trong hình vẽ: 
Như bạn đã hiểu, hệ tọa độ affine thậm chí còn ít tiện lợi hơn, các công thức về độ dài của vectơ và đoạn thẳng, mà chúng ta đã xem xét trong phần thứ hai của bài học, không hoạt động trong đó. Vectơ cho hình nộm, nhiều công thức ngon liên quan đến tích vô hướng của vectơ. Nhưng các quy tắc cộng vectơ và nhân một vectơ với một số là hợp lệ, các công thức để chia một đoạn về mặt này, cũng như một số dạng bài toán khác mà chúng ta sẽ sớm xem xét.
Và kết luận là trường hợp cụ thể thuận tiện nhất của hệ tọa độ affine là hệ hình chữ nhật Descartes. Vì vậy, cô ấy, của chính cô ấy, thường xuyên phải được nhìn thấy nhất. ... Tuy nhiên, mọi thứ trong cuộc sống này đều là tương đối - có rất nhiều trường hợp để có một đường xiên (hoặc một số trường hợp khác, chẳng hạn, cực) hệ tọa độ. Vâng, và những hệ thống hình người như vậy có thể sẽ xảy ra =)
Hãy chuyển sang phần thực hành. Tất cả các bài toán trong bài học này đều hợp lệ cho cả một hệ tọa độ hình chữ nhật và cho trường hợp affine tổng quát. Không có gì phức tạp ở đây, tất cả các tài liệu đều có sẵn ngay cả với một cậu học sinh.
Làm thế nào để xác định thẳng hàng của vectơ mặt phẳng?
Điều điển hình. Để hai vectơ mặt phẳng ![]() thẳng hàng, cần và đủ là các tọa độ tương ứng của chúng phải tỷ lệ với nhau Về cơ bản, đây là sự tinh chỉnh theo từng tọa độ của mối quan hệ hiển nhiên.
thẳng hàng, cần và đủ là các tọa độ tương ứng của chúng phải tỷ lệ với nhau Về cơ bản, đây là sự tinh chỉnh theo từng tọa độ của mối quan hệ hiển nhiên.
ví dụ 1
a) Kiểm tra xem các vectơ có thẳng hàng không ![]() .
.
b) Các vectơ có lập thành cơ sở không? ![]() ?
?
Quyết định:
a) Tìm xem có tồn tại vectơ ![]() hệ số tương xứng, sao cho các cân bằng được thỏa mãn:
hệ số tương xứng, sao cho các cân bằng được thỏa mãn: ![]()
Tôi chắc chắn sẽ cho bạn biết về phiên bản “foppish” của việc áp dụng quy tắc này, hoạt động khá tốt trong thực tế. Ý tưởng là ngay lập tức vẽ một tỷ lệ và xem nó có chính xác không:
Hãy tính một tỷ lệ từ các tỷ lệ của các tọa độ tương ứng của các vectơ:
Chúng tôi rút gọn:
, do đó, các tọa độ tương ứng là tỷ lệ, do đó,
Mối quan hệ có thể được thực hiện và ngược lại, đây là một tùy chọn tương đương:
Để tự kiểm tra, người ta có thể sử dụng thực tế là các vectơ thẳng hàng được biểu thị tuyến tính qua nhau. Trong trường hợp này, có các bình đẳng ![]() . Tính hợp lệ của chúng có thể dễ dàng được kiểm tra thông qua các phép toán cơ bản với các vectơ:
. Tính hợp lệ của chúng có thể dễ dàng được kiểm tra thông qua các phép toán cơ bản với các vectơ: 
b) Hai vectơ mặt phẳng tạo thành một cơ sở nếu chúng không thẳng hàng (độc lập tuyến tính). Chúng tôi kiểm tra các vectơ để biết tính thẳng hàng ![]() . Hãy tạo một hệ thống:
. Hãy tạo một hệ thống: 
Từ phương trình đầu tiên, nó theo sau đó, từ phương trình thứ hai, nó theo sau, có nghĩa là, hệ thống không nhất quán(không có giải pháp). Như vậy, tọa độ tương ứng của các vectơ không tỉ lệ thuận.
Sự kết luận: các vectơ độc lập tuyến tính và tạo thành một cơ sở.
Một phiên bản đơn giản của giải pháp trông giống như sau:
Soạn tỷ lệ từ các tọa độ tương ứng của các vectơ ![]() :
:
Do đó, các vectơ này độc lập tuyến tính và tạo thành cơ sở.
Thông thường những người đánh giá không từ chối tùy chọn này, nhưng một vấn đề nảy sinh trong trường hợp một số tọa độ bằng không. Như thế này: ![]() . Hoặc như thế này:
. Hoặc như thế này: ![]() . Hoặc như thế này:
. Hoặc như thế này: ![]() . Làm thế nào để làm việc thông qua tỷ lệ ở đây? (Thực sự, bạn không thể chia cho số không). Chính vì lý do này mà tôi đã gọi giải pháp đơn giản hóa là "foppish".
. Làm thế nào để làm việc thông qua tỷ lệ ở đây? (Thực sự, bạn không thể chia cho số không). Chính vì lý do này mà tôi đã gọi giải pháp đơn giản hóa là "foppish".
Trả lời: a), b) hình thức.
Một ví dụ sáng tạo nhỏ cho một giải pháp độc lập:
Ví dụ 2
Với giá trị nào của các vectơ tham số ![]() sẽ thẳng hàng?
sẽ thẳng hàng?
Trong dung dịch mẫu, tham số được tìm thấy thông qua tỷ lệ.
Có một cách đại số hay để kiểm tra tính thẳng hàng của các vectơ. Hãy hệ thống hóa kiến thức của chúng ta và chỉ thêm nó làm điểm thứ năm:
Đối với hai vectơ mặt phẳng, các phát biểu sau đây là tương đương:
2) vectơ tạo thành một cơ sở;
3) các vectơ không thẳng hàng;
+ 5) định thức, bao gồm các tọa độ của các vectơ này, là khác không.
Tương ứng, các câu đối lập sau đây là tương đương:
1) vectơ phụ thuộc tuyến tính;
2) vectơ không cùng phương;
3) các vectơ thẳng hàng;
4) các vectơ có thể được biểu diễn tuyến tính qua nhau;
+ 5) định thức, bao gồm tọa độ của các vectơ này, bằng không.
Tôi rất, rất hy vọng rằng tại thời điểm này bạn đã hiểu tất cả các điều khoản và tuyên bố đã gặp phải.
Chúng ta hãy xem xét kỹ hơn điểm mới, thứ năm: hai vectơ mặt phẳng ![]() thẳng hàng nếu và chỉ khi định thức bao gồm tọa độ của các vectơ đã cho bằng 0:. Để sử dụng tính năng này, tất nhiên, bạn cần có khả năng tìm các yếu tố quyết định.
thẳng hàng nếu và chỉ khi định thức bao gồm tọa độ của các vectơ đã cho bằng 0:. Để sử dụng tính năng này, tất nhiên, bạn cần có khả năng tìm các yếu tố quyết định.
Chúng tôi sẽ quyết định Ví dụ 1 theo cách thứ hai:
a) Tính định thức, gồm tọa độ của các vectơ ![]() :
:![]() , vì vậy các vectơ này thẳng hàng.
, vì vậy các vectơ này thẳng hàng.
b) Hai vectơ mặt phẳng tạo thành một cơ sở nếu chúng không thẳng hàng (độc lập tuyến tính). Hãy để chúng tôi tính định thức bao gồm tọa độ của các vectơ ![]() :
:![]() , do đó các vectơ là độc lập tuyến tính và tạo thành một cơ sở.
, do đó các vectơ là độc lập tuyến tính và tạo thành một cơ sở.
Trả lời: a), b) hình thức.
Nó trông nhỏ gọn và đẹp hơn nhiều so với giải pháp có tỷ lệ.
Với sự trợ giúp của tài liệu được xem xét, có thể thiết lập không chỉ tính thẳng hàng của các vectơ mà còn chứng minh được tính song song của các đoạn thẳng, đoạn thẳng. Hãy xem xét một số vấn đề với các hình dạng hình học cụ thể.
Ví dụ 3
Các đỉnh của một tứ giác đã cho. Chứng minh rằng tứ giác là hình bình hành.
Bằng chứng: Không cần thiết phải xây dựng hình vẽ trong bài toán, vì lời giải sẽ mang tính chất phân tích thuần túy. Hãy nhớ định nghĩa của một hình bình hành:
Hình bình hành
Một tứ giác được gọi là hình tứ giác, trong đó các cạnh đối diện song song với nhau.
Do đó, cần phải chứng minh:
1) tính song song của các cạnh đối diện và;
2) tính song song của các cạnh đối diện và.
Chúng tôi chứng minh:
1) Tìm các vectơ: 
![]()
2) Tìm các vectơ: 
Kết quả là cùng một vectơ (“theo trường học” - các vectơ bằng nhau). Tính thông đồng là khá rõ ràng, nhưng tốt hơn hết bạn nên đưa ra quyết định đúng đắn, có sự sắp xếp. Tính định thức, bao gồm tọa độ của các vectơ: ![]() , vì vậy các vectơ này thẳng hàng, và.
, vì vậy các vectơ này thẳng hàng, và.
Sự kết luận: Các cạnh đối diện của tứ giác là các cặp song song nên nó là hình bình hành theo định nghĩa. Q.E.D.
Nhiều số liệu tốt và khác nhau:
Ví dụ 4
Các đỉnh của một tứ giác đã cho. Chứng minh rằng tứ giác là hình thang.
Đối với một công thức chứng minh chặt chẽ hơn, tất nhiên là tốt hơn để có được định nghĩa của hình thang, nhưng chỉ cần nhớ nó trông như thế nào là đủ.
Đây là một nhiệm vụ cho quyết định độc lập. Lời giải hoàn chỉnh ở cuối bài.
Và bây giờ là lúc bạn từ từ di chuyển từ máy bay vào không gian:
Làm thế nào để xác định tính thẳng hàng của vectơ không gian?
Quy tắc là rất giống nhau. Để hai vectơ không gian thẳng hàng, cần và đủ rằng các tọa độ tương ứng của chúng tỷ lệ với.
Ví dụ 5
Tìm hiểu xem các vectơ không gian sau có thẳng hàng không:
một) ;
b)
trong) ![]()
Quyết định:
a) Kiểm tra xem có hệ số tỉ lệ đối với các tọa độ tương ứng của vectơ hay không:
Hệ thống không có lời giải, có nghĩa là các vectơ không thẳng hàng.
"Đơn giản hóa" được thực hiện bằng cách kiểm tra tỷ lệ. Trong trường hợp này:
- các tọa độ tương ứng không tỷ lệ, có nghĩa là các vectơ không thẳng hàng.
Trả lời: các vectơ không thẳng hàng.
b-c) Đây là những điểm cho quyết định độc lập. Hãy thử nó theo hai cách.
Có một phương pháp để kiểm tra các vectơ không gian về độ thẳng hàng và thông qua định thức bậc ba, phương pháp này được đề cập trong bài báo Tích chéo của vectơ.
Tương tự như trường hợp mặt phẳng, các công cụ được xem xét có thể được sử dụng để nghiên cứu tính song song của các đoạn và đường không gian.
Chào mừng đến với phần thứ hai:
Sự phụ thuộc tuyến tính và tính độc lập của vectơ không gian ba chiều.
Cơ sở không gian và hệ tọa độ affine
Nhiều quy tắc mà chúng tôi đã xem xét trên máy bay cũng sẽ có hiệu lực đối với không gian. Tôi đã cố gắng giảm thiểu phần tóm tắt của lý thuyết, vì phần chia sẻ thông tin của sư tử đã được nhai lại. Tuy nhiên, tôi khuyên bạn nên đọc kỹ phần giới thiệu vì các thuật ngữ và khái niệm mới sẽ xuất hiện.
Bây giờ, thay vì mặt phẳng của bàn máy tính, chúng ta hãy kiểm tra không gian ba chiều. Đầu tiên, hãy tạo cơ sở của nó. Có người hiện đang ở trong nhà, có người ở ngoài trời, nhưng trong mọi trường hợp, chúng ta không thể rời xa ba chiều: chiều rộng, chiều dài và chiều cao. Do đó, ba vectơ không gian được yêu cầu để xây dựng cơ sở. Một hoặc hai vectơ là không đủ, vectơ thứ tư là thừa.
Và một lần nữa chúng tôi ấm lên trên các ngón tay. Hãy giơ tay lên và dang rộng ra các hướng khác nhau ngón cái, ngón trỏ và ngón giữa. Đây sẽ là các vectơ, chúng nhìn theo các hướng khác nhau, có độ dài khác nhau và có các góc khác nhau giữa chúng. Xin chúc mừng, cơ sở của không gian ba chiều đã sẵn sàng! Nhân tiện, bạn không cần phải chứng minh điều này với giáo viên, dù bạn có vặn ngón tay như thế nào, nhưng bạn không thể thoát khỏi định nghĩa =)
Tiếp theo, chúng tôi hỏi một câu hỏi quan trọng, liệu ba vectơ bất kỳ có tạo thành cơ sở của không gian ba chiều hay không? Vui lòng ấn mạnh ba ngón tay lên mặt bàn máy tính. Chuyện gì đã xảy ra thế? Ba vectơ nằm trong cùng một mặt phẳng, và nói một cách đại khái, chúng ta đã mất một trong các phép đo - chiều cao. Các vectơ như vậy là đồng phẳng và, khá rõ ràng, rằng cơ sở của không gian ba chiều không được tạo ra.
Cần lưu ý rằng vectơ đồng phẳng không nhất thiết phải nằm trong cùng một mặt phẳng, chúng có thể nằm trong các mặt phẳng song song (chỉ cần bạn đừng dùng ngón tay làm điều này, chỉ có Salvador Dali mới ra tay như vậy thôi =)).
Sự định nghĩa: vectơ được gọi là đồng phẳng nếu tồn tại một mặt phẳng mà chúng song song với nhau. Ở đây, điều hợp lý là thêm rằng nếu một mặt phẳng như vậy không tồn tại, thì các vectơ sẽ không phải là đồng phẳng.
Ba vectơ đồng phẳng luôn phụ thuộc tuyến tính nghĩa là chúng được thể hiện tuyến tính qua nhau. Để đơn giản, một lần nữa hãy tưởng tượng rằng chúng nằm trong cùng một mặt phẳng. Thứ nhất, vectơ không chỉ đồng phẳng, mà còn có thể thẳng hàng, sau đó bất kỳ vectơ nào cũng có thể được biểu diễn thông qua bất kỳ vectơ nào. Trong trường hợp thứ hai, nếu, ví dụ, nếu các vectơ không thẳng hàng, thì vectơ thứ ba được biểu diễn thông qua chúng theo một cách duy nhất: ![]() (và tại sao thì dễ đoán từ các tư liệu của phần trước).
(và tại sao thì dễ đoán từ các tư liệu của phần trước).
Các ngược lại cũng đúng: ba vectơ không đồng phẳng luôn độc lập tuyến tính, nghĩa là, chúng không có cách nào được thể hiện qua nhau. Và, rõ ràng, chỉ những vectơ như vậy mới có thể tạo thành cơ sở của một không gian ba chiều.
Sự định nghĩa: Cơ sở của không gian ba chiềuđược gọi là bộ ba của các vectơ độc lập tuyến tính (không đồng phẳng), được thực hiện theo một thứ tự nhất định, trong khi bất kỳ vectơ nào của không gian cách duy nhất mở rộng trong cơ sở đã cho, tọa độ của vectơ trong cơ sở đã cho ở đâu
Xin nhắc lại, bạn cũng có thể nói rằng một vectơ được biểu diễn dưới dạng kết hợp tuyến tính vectơ cơ sở.
Khái niệm hệ tọa độ được đưa ra giống hệt như đối với trường hợp mặt phẳng, một điểm và ba vectơ độc lập tuyến tính bất kỳ là đủ:
nguồn gốc, và không đồng phẳng vectơ, được thực hiện theo một thứ tự nhất định, đặt hệ tọa độ affine của không gian ba chiều
:
Tất nhiên, lưới tọa độ là "xiên" và không thuận tiện, nhưng, tuy nhiên, hệ tọa độ được xây dựng cho phép chúng ta chắc chắn xác định tọa độ của một vectơ bất kỳ và tọa độ của một điểm bất kỳ trong không gian. Tương tự như mặt phẳng, trong hệ tọa độ affine của không gian, một số công thức mà tôi đã đề cập sẽ không hoạt động.
Trường hợp đặc biệt quen thuộc và thuận tiện nhất của hệ tọa độ affine, như mọi người có thể đoán, là hệ tọa độ không gian hình chữ nhật:
điểm trong không gian được gọi là nguồn gốc, và chính thống bộ cơ sở Hệ tọa độ Descartes của không gian
. hình ảnh quen thuộc: 
Trước khi tiến hành các công việc thực tế, chúng tôi hệ thống hóa lại thông tin:
Đối với ba vectơ không gian, các câu lệnh sau là tương đương:
1) các vectơ là độc lập tuyến tính;
2) vectơ tạo thành một cơ sở;
3) các vectơ không đồng phẳng;
4) các vectơ không thể biểu diễn tuyến tính qua nhau;
5) định thức, bao gồm tọa độ của các vectơ này, khác 0.
Tôi nghĩ rằng những tuyên bố trái ngược nhau là điều dễ hiểu.
Theo truyền thống, sự phụ thuộc / độc lập tuyến tính của vectơ không gian được kiểm tra bằng cách sử dụng định thức (mục 5). Các nhiệm vụ thực hành còn lại sẽ mang tính chất đại số rõ rệt. Đã đến lúc treo một cây gậy hình học lên đinh và sử dụng một cây gậy bóng chày đại số tuyến tính:
Ba vectơ không gian là đồng phẳng nếu và chỉ khi định thức bao gồm tọa độ của các vectơ đã cho bằng 0:  .
.
Tôi thu hút sự chú ý của bạn đến một sắc thái kỹ thuật nhỏ: tọa độ của vectơ không chỉ có thể được viết trong các cột mà còn trong các hàng (giá trị của định thức sẽ không thay đổi so với điều này - hãy xem các thuộc tính của định thức). Nhưng nó tốt hơn nhiều trong các cột, vì nó có lợi hơn cho việc giải quyết một số vấn đề thực tế.
Đối với những độc giả đã quên các phương pháp tính toán các định thức một chút, hoặc có thể họ định hướng kém, tôi đề xuất một trong những bài học lâu đời nhất của tôi: Làm thế nào để tính định thức?
Ví dụ 6
Kiểm tra xem các vectơ sau có tạo thành cơ sở của không gian ba chiều hay không:
Quyết định: Trong thực tế, toàn bộ giải pháp đi xuống để tính toán định thức.
a) Tính định thức, bao gồm tọa độ của các vectơ (định thức được khai triển trên dòng đầu tiên): 
, có nghĩa là các vectơ là độc lập tuyến tính (không đồng phẳng) và tạo thành cơ sở của một không gian ba chiều.
Trả lời: các vectơ này tạo thành cơ sở
b) Đây là một điểm cho quyết định độc lập. Có đầy đủ lời giải và đáp án cuối bài.
Ngoài ra còn có các nhiệm vụ sáng tạo:
Ví dụ 7
Tại giá trị nào của tham số các vectơ sẽ đồng phẳng?
Quyết định: Vectơ là đồng phẳng nếu và chỉ khi định thức bao gồm tọa độ của các vectơ đã cho bằng 0: 
Về cơ bản, nó được yêu cầu để giải một phương trình với một định thức. Chúng ta bay vào các số không như diều vào các trò chơi giật gân - sẽ có lợi nhất khi mở định thức ở dòng thứ hai và ngay lập tức loại bỏ các điểm tối thiểu: 
Chúng tôi thực hiện đơn giản hóa hơn nữa và giảm vấn đề thành phương trình tuyến tính đơn giản nhất: ![]()
Trả lời: tại
Có thể dễ dàng kiểm tra ở đây, đối với điều này, bạn cần thay thế giá trị kết quả thành định thức ban đầu và đảm bảo rằng  bằng cách mở lại nó.
bằng cách mở lại nó.
Tóm lại, chúng ta hãy xem xét một bài toán điển hình khác, có tính chất đại số hơn và theo truyền thống được đưa vào khóa học đại số tuyến tính. Nó phổ biến đến mức nó xứng đáng có một chủ đề riêng:
Chứng minh rằng 3 vectơ tạo thành một cơ sở của một không gian ba chiều
và tìm tọa độ của vectơ thứ 4 trong cơ sở đã cho
Ví dụ 8
Các vectơ đã cho. Chứng tỏ rằng các vectơ tạo thành một cơ sở của không gian ba chiều và tìm tọa độ của vectơ trong cơ sở này.
Quyết định: Hãy đối phó với điều kiện trước. Theo điều kiện, bốn vectơ được đưa ra, và như bạn có thể thấy, chúng đã có tọa độ trên cơ sở nào đó. Cơ sở là gì - chúng tôi không quan tâm. Và điều đáng quan tâm sau đây: ba vectơ cũng có thể tạo thành một cơ sở mới. Và bước đầu tiên hoàn toàn giống với cách giải của Ví dụ 6, cần kiểm tra xem các vectơ có thực sự độc lập tuyến tính hay không:
Tính định thức, bao gồm tọa độ của các vectơ: 
, do đó các vectơ độc lập tuyến tính và tạo thành cơ sở của một không gian ba chiều.
! Quan trọng : tọa độ vectơ nhất thiết viết ra thành các cộtđịnh thức, không phải chuỗi. Nếu không, sẽ có sự nhầm lẫn trong thuật toán giải pháp tiếp theo.
 Hai đầu và sáu chân; bốn người đi bộ, và hai người nằm yên
Hai đầu và sáu chân; bốn người đi bộ, và hai người nằm yên Lòng tự trọng - nó là gì: khái niệm, cấu trúc, các loại và cấp độ
Lòng tự trọng - nó là gì: khái niệm, cấu trúc, các loại và cấp độ Con đường của Cassandra, hoặc Cuộc phiêu lưu Pasta Cuộc chiến trên Trái đất và Dưới lòng đất
Con đường của Cassandra, hoặc Cuộc phiêu lưu Pasta Cuộc chiến trên Trái đất và Dưới lòng đất