Матрични норми. Последователност и подчиненост на нормите
» Урок 12. Матричен ранг. Изчисляване на матрично ранг. Матрична норма
Урок номер 12. Матричен ранг. Изчисляване на матрично ранг. Матрична норма.
Ако всички матрични минорниАпоръчкакса равни на нула, то всички минорни от порядък k + 1, ако съществуват такива, също са равни на нула.
Матричен ранг А
е най-големият ред на минорите на матрицата А
, различен от нула.
Максималният ранг може да бъде равен на минималния брой от броя на редовете или колоните на матрицата, т.е. ако матрицата има размер 4x5, тогава максималният ранг ще бъде 4.
Минималният ранг на матрица е 1, освен ако не се занимавате с нулева матрица, където рангът винаги е нула.
Рангът на недегенерирана квадратна матрица от порядък n е равен на n, тъй като нейната детерминанта е минор от порядък n и неизродената матрица е ненула.
Транспонирането на матрица не променя нейния ранг.
Нека рангът на матрицата е . Тогава се извиква всеки минор от ред, различен от нула основен минор.
Пример.Дадена е матрица A. 
Детерминантата на матрицата е нула.
Минор от втори ред ![]() . Следователно r(A)=2 и минорът е основен.
. Следователно r(A)=2 и минорът е основен.
Основен непълнолетен също е непълнолетен ![]() .
.
Незначителен ![]() , защото =0, така че няма да е основно.
, защото =0, така че няма да е основно.
Упражнение: самостоятелно проверете кои други непълнолетни от втори ред ще бъдат основни и кои не.
Намирането на ранга на матрица чрез изчисляване на всички нейни минорни изисква твърде много изчислителна работа. (Читателят може да провери дали има 36 второстепенни минорни числа в квадратна матрица от четвърти порядък.) Следователно се използва различен алгоритъм за намиране на ранга. За да се опише, е необходима допълнителна информация.
Следните операции върху тях наричаме елементарни трансформации на матрици:
1) пермутация на редове или колони;
2) умножаване на ред или колона по число, различно от нула;
3) добавяне към един от редовете на друг ред, умножен по число, или добавяне към една от колоните на друга колона, умножен по число.
При елементарни трансформации рангът на матрицата не се променя.
Алгоритъм за изчисляване на ранга на матрицае подобен на алгоритъма за изчисляване на детерминанта и се крие във факта, че с помощта на елементарни трансформации матрицата се свежда до проста форма, за която не е трудно да се намери ранг. Тъй като рангът не се променя с всяка трансформация, чрез изчисляване на ранга на трансформираната матрица, по този начин намираме ранга на оригиналната матрица.
Нека се изисква да се изчисли рангът на матрицата на измеренията мхн.
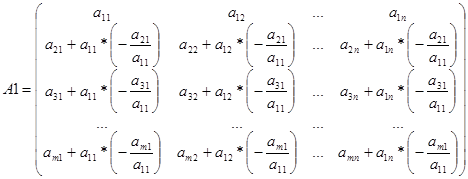
В резултат на изчисленията матрицата A1 има формата 

Ако всички редове, започвайки от третия, са нула, тогава ![]() , тъй като непълнолетни
, тъй като непълнолетни ![]() . В противен случай, чрез пермутиране на редове и колони с числа по-големи от две, постигаме третият елемент от третия ред да е различен от нула. Освен това, като добавим третия ред, умножен по съответните числа, към редовете с големи числа, получаваме нули в третата колона, започвайки от четвъртия елемент и т.н.
. В противен случай, чрез пермутиране на редове и колони с числа по-големи от две, постигаме третият елемент от третия ред да е различен от нула. Освен това, като добавим третия ред, умножен по съответните числа, към редовете с големи числа, получаваме нули в третата колона, започвайки от четвъртия елемент и т.н.
На някакъв етап ще стигнем до матрица, в която всички редове, започвайки от (r + 1) th, са равни на нула (или липсват при ), а минорът в първите редове и първите колони е детерминантата на триъгълник матрица с различни от нула елементи по диагонала . Рангът на такава матрица е. Следователно Rang(A)=r.
В предложения алгоритъм за намиране на ранга на матрица всички изчисления трябва да се извършват без закръгляване. Произволно малка промяна в поне един от елементите на междинните матрици може да доведе до факта, че полученият отговор ще се различава от ранга на оригиналната матрица с няколко единици.
Ако елементите в оригиналната матрица са цели числа, тогава е удобно да се извършват изчисления, без да се използват дроби. Ето защо на всеки етап е препоръчително низовете да се умножават с такива числа, че в изчисленията да не се появяват дроби.
В лабораторна и практическа работа ще разгледаме пример за намиране на ранга на матрица.
АЛГОРИТЪМ ЗА НАМИРАНЕ МАТРИЧНИ РЕГЛАМЕНТИ
.
Има само три норми на матрицата.
Първа матрична норма= максимумът от числата, получени чрез събиране на всички елементи на всяка колона, взети по модул.
Пример: нека е дадена матрица 3x2 A (фиг. 10). Първата колона съдържа елементи: 8, 3, 8. Всички елементи са положителни. Нека намерим тяхната сума: 8+3+8=19. Втората колона съдържа елементите: 8, -2, -8. Два елемента са отрицателни, следователно, когато се добавят тези числа, е необходимо да се замени модулът на тези числа (тоест без знаците минус). Нека намерим тяхната сума: 8+2+8=18. Максимумът на тези две числа е 19. Така че първата норма на матрицата е 19.

Фигура 10.
Втора матрична нормае корен квадратен от сбора от квадратите на всички матрични елементи. И това означава, че квадратуваме всички елементи на матрицата, след което добавяме получените стойности и извличаме квадратния корен от резултата.
В нашия случай нормата 2 на матрицата се оказа равна на корен квадратен от 269. На диаграмата приблизително взех квадратен корен от 269 и резултатът беше приблизително 16,401. Въпреки че е по-правилно да не се извлича коренът. 
Трета матрица на нормитее максимумът от числата, получени чрез събиране на всички елементи от всеки ред, взети по модул.
В нашия пример: първият ред съдържа елементи: 8, 8. Всички елементи са положителни. Нека намерим тяхната сума: 8+8=16. Вторият ред съдържа елементи: 3, -2. Един от елементите е отрицателен, така че когато събирате тези числа, трябва да замените модула на това число. Нека намерим тяхната сума: 3+2=5. Третият ред съдържа елементите 8 и -8. Един от елементите е отрицателен, така че когато събирате тези числа, трябва да замените модула на това число. Нека намерим тяхната сума: 8+8=16. Максимумът на тези три числа е 16. Така че третата норма на матрицата е 16. 
Съставител: Saliy N.A.
Матрична норманаричаме реалното число, присвоено на тази матрица ||A|| така, че като реално число, то се приписва на всяка матрица от n-мерното пространство и удовлетворява 4 аксиоми:
1. ||A||³0 и ||A||=0 само ако A е нулева матрица;
2. ||αA||=|α|·||A||, където a R;
3. ||A+B||£||A||+||B||;
4. ||A·B||£||A||·||B||. (свойство на мултипликативност)
Матричната норма може да се въведе по различни начини. Матрица А може да се разглежда като n 2 -размерен вектор.
Тази норма се нарича евклидова норма на матрица.
Ако за всяка квадратна матрица A и всеки вектор x, чиято размерност е равна на реда на матрицата, неравенството ||Ax||£||A||·||x||
тогава казваме, че нормата на матрицата A е в съответствие с нормата на вектора. Обърнете внимание, че нормата на вектора е отляво в последното условие (Ax е вектор).
Различни матрични норми са в съответствие с дадена векторна норма. Нека изберем най-малкия измежду тях. Такава ще бъде
Тази матрична норма е подчинена на дадената векторна норма. Наличието на максимум в този израз следва от непрекъснатостта на нормата, тъй като винаги съществува вектор x -> ||x||=1 и ||Ax||=||A||.
Нека покажем, че x тогава нормата N(A) не подлежи на никаква векторна норма. Матричните норми, подчинени на по-рано въведените векторни норми, се изразяват по следния начин:
1. ||A|| ¥ = |a ij | (норма-максимум)
2. ||A|| 1 = |a ij | (нормална сума)
3. ||A|| 2 = , (спектрална норма)
където s 1 е най-голямата собствена стойност на симетричната матрица A¢A, която е продукт на транспонираната и оригиналната матрици. Ако матрицата A¢A е симетрична, тогава всички нейни собствени стойности са реални и положителни. Числото l е собствена стойност, а ненулев вектор x е собствен вектор на матрицата A (ако са свързани с отношението Ax=lx). Ако самата матрица A е симетрична, A¢ = A, тогава A¢A = A 2 и след това s 1 = , където е собствената стойност на матрицата A с най-голяма абсолютна стойност. Следователно в този случай имаме = .
Собствените стойности на матрицата не надвишават нито една от нейните договорени норми. Нормализиране на релацията, дефинираща собствените стойности, получаваме ||λx||=||Ax||, |λ|·||x||=||Ax||£||A||·||x||, | λ| £||A||
Тъй като ||A|| 2 £||A|| e , където евклидовата норма може да се изчисли просто, вместо спектралната норма, евклидовата норма на матрицата може да се използва в оценките.
30. Условност на системите от уравнения. Кондициониращ фактор .
Степен на условност- влияние на решението върху изходните данни. ax = b: вектор бсъответства на решение х. Нека бъде бще се промени с . След това векторът b+ще съответства на новото решение х+ : A(x+ ) = b+. Тъй като системата е линейна, тогава Ax+A = b+, тогава А = ; = ; = ; b = Ax; = тогава ; * , където е относителната грешка на смущението на решението, – кондициониращ факторcond(A) (колко пъти може да се увеличи грешката на решението), е относителното смущение на вектора б. cond(A) = ; cond(A)*Свойства на коефициента: зависи от избора на матричната норма; cond( = cond(A); умножаването на матрица по число не влияе на фактора на условието. Колкото по-голям е коефициентът, толкова по-силно се отразява грешката в изходните данни върху решението на SLAE. Номерът на условието не може да бъде по-малък от 1.
31. Sweep метод за решаване на системи от линейни алгебрични уравнения.
Често има нужда от решаване на системи, чиито матрици са слабо запълнени, т.е. съдържащ много различни от нула елементи. Матриците на такива системи обикновено имат определена структура, сред която има системи с матрици на лентова структура, т.е. в тях ненулеви елементи са разположени на главния диагонал и на няколко второстепенни диагонала. За решаване на системи с лентови матрици, методът на Гаус може да бъде трансформиран в по-ефективни методи. Нека разгледаме най-простия случай на лентови системи, към който, както ще видим по-нататък, решението на задачи за дискретизация на гранични задачи за диференциални уравнения се редуцира чрез методите на крайните разлики, крайните елементи и т.н. Тридиагонална матрица е такава матрица, която има ненулеви елементи само на главния диагонал и в съседство с него:
Трите диагонални матрици от различни от нула елементи има общо (3n-2).
Преименувайте коефициентите на матрицата:
След това, в нотация компонент по компонент, системата може да бъде представена като:
A i * x i-1 + b i * x i + c i * x i+1 = d i , i=1, 2,…, n; (7)
a 1 =0, c n =0. (осем)
Структурата на системата приема връзката само между съседни неизвестни:
x i \u003d x i * x i +1 + h i (9)
x i -1 =x i -1* x i + h i -1 и заместваме в (7):
A i (x i-1* x i + h i-1)+ b i * x i + c i * x i+1 = d i
(a i * x i-1 + b i)x i = –c i * x i+1 +d i –a i * h i-1
Сравнявайки получения израз с представяне (7), получаваме:
Формулите (10) представляват рекурсивни отношения за изчисляване на коефициенти на размах. Те изискват да бъдат посочени първоначалните стойности. В съответствие с първото условие (8) за i =1 имаме 1 =0, което означава
Освен това останалите коефициенти на размах се изчисляват и съхраняват по формули (10) за i=2,3,…, n, а за i=n, като се вземе предвид второто условие (8), получаваме x n =0 . Следователно, в съответствие с формула (9) x n = h n .
След това, съгласно формулата (9), неизвестните x n -1 , x n -2 , …, x 1 се намират последователно. Този етап от изчислението се нарича обратен ход, докато изчислението на коефициентите на размах се нарича напред размах.
За успешното прилагане на метода на почистване е необходимо в процеса на изчисления да няма ситуации с деление на нула, а при голяма размерност на системите не трябва да има бързо увеличаване на грешките при закръгляване. Ще извикаме бягането правилно, ако знаменателят на коефициентите на извъртане (10) не е в нула, и устойчиви, ако ½x i ½<1 при всех i=1,2,…, n. Достаточные условия корректности и устойчивости прогонки, которые во многих приложениях выполняются, определяются теоремой.
Теорема. Нека коефициентите a i и c i от уравнение (7) за i=2,3,..., n-1 са различни от нула и нека
½b i ½>½a i ½+½c i ½ за i=1, 2,..., n. (единадесет)
Тогава размахът, определен от формули (10), (9), е правилен и стабилен.
Енциклопедичен YouTube
1 / 1
✪ Векторна норма. част 4
Субтитри
Определение
Нека K е основното поле (обикновено К = Р или К = ° С ) и е линейното пространство на всички матрици с m реда и n колони, състоящи се от елементи от K . В пространството на матриците се дава норма, ако всяка матрица е свързана с неотрицателно реално число ‖ A ‖ (\displaystyle \|A\|), наречена своя норма, така че
В случай на квадратни матрици (т.е. м = н), матриците могат да се умножават без да напускат пространството и следователно нормите в тези пространства обикновено също удовлетворяват свойството субмултипликативност :
Субмултипликативността може да се извърши и за нормите на неквадратни матрици, но дефинирани за няколко необходими размера наведнъж. А именно, ако A е матрица ℓ × м, а B е матрицата м × н, тогава A B- матрица ℓ × н .
Операторски норми
Важен клас матрични норми са операторски норми, наричан още подчинени или индуцирани . Операторната норма е уникално конструирана в съответствие с двете норми, дефинирани в и , въз основа на факта, че всяка матрица м × нсе представя с линеен оператор от K n (\displaystyle K^(n))в K m (\displaystyle K^(m)). по-конкретно,
‖ A ‖ = sup ( ‖ A x ‖ : x ∈ K n , ‖ x ‖ = 1 ) = sup ( ‖ A x ‖ ‖ x ‖ : x ∈ K n , x ≠ 0 ) . (\displaystyle (\begin(подравнен)\|A\|&=\sup\(\|Ax\|:x\in K^(n),\ \|x\|=1\)\\&=\ sup \left\((\frac (\|Ax\|)(\|x\|)):x\in K^(n),\ x\neq 0\right\).\end(подравнен)))При условие, че нормите на векторни пространства са последователно посочени, такава норма е субмултипликативна (виж ).
Примери за операторски норми
Свойства на спектралната норма:
- Спектралната норма на оператор е равна на максималната сингулярна стойност на този оператор.
- Спектралната норма на нормален оператор е равна на абсолютната стойност на максималната собствена стойност по модул на този оператор.
- Спектралната норма не се променя, когато една матрица се умножи по ортогонална (унитарна) матрица.
Неоператорни норми на матрици
Има матрични норми, които не са операторни норми. Концепцията за неоператорни норми на матрици е въведена от Ю. И. Любич и проучена от Г. Р. Белицки.
Пример за неоператорна норма
Например, разгледайте две различни операторски норми ‖ A ‖ 1 (\displaystyle \|A\|_(1))и ‖ A ‖ 2 (\displaystyle \|A\|_(2)), като норми на редове и колони. Формиране на нова норма ‖ A ‖ = m a x (‖ A ‖ 1 , ‖ A ‖ 2) (\displaystyle \|A\|=max(\|A\|_(1),\|A\|_(2))). Новата норма е с пръстеновидно свойство ‖ A B ‖ ≤ ‖ A ‖ ‖ B ‖ (\displaystyle \|AB\|\leq \|A\|\|B\|), запазва единицата ‖ I ‖ = 1 (\displaystyle \|I\|=1)и не е оператор.
Примери за норми
вектор p (\displaystyle p)-норма
Може да се разглежда m × n (\displaystyle m\times n)матрица като вектор на размера m n (\displaystyle mn)и използвайте стандартни векторни норми:
‖ A ‖ p = ‖ v e c (A) ‖ p = (∑ i = 1 m ∑ j = 1 n | a i j | p) 1 / p (\displaystyle \|A\|_(p)=\|\mathrm ( vec) (A)\|_(p)=\left(\sum _(i=1)^(m)\sum _(j=1)^(n)|a_(ij)|^(p)\ вдясно)^(1/p))Нормата на Фробениус
Нормата на Фробениус, или евклидова нормае частен случай на p-нормата за стр = 2 : ‖ A ‖ F = ∑ i = 1 m ∑ j = 1 n a i j 2 (\displaystyle \|A\|_(F)=(\sqrt (\sum _(i=1)^(m)\sum _(j) =1)^(n)a_(ij)^(2)))).
Нормата на Фробениус е лесна за изчисляване (в сравнение например със спектралната норма). Той има следните свойства:
‖ A x ‖ 2 2 = ∑ i = 1 m | ∑ j = 1 n a i j x j | 2 ≤ ∑ i = 1 m (∑ j = 1 n | a i j | 2 ∑ j = 1 n | x j | 2) = ∑ j = 1 n | x j | 2 ‖ A ‖ F 2 = ‖ A ‖ F 2 ‖ x ‖ 2 2 . (\displaystyle \|Ax\|_(2)^(2)=\sum _(i=1)^(m)\left|\sum _(j=1)^(n)a_(ij)x_( j)\вдясно|^(2)\leq \sum _(i=1)^(m)\left(\sum _(j=1)^(n)|a_(ij)|^(2)\sum _(j=1)^(n)|x_(j)|^(2)\right)=\sum _(j=1)^(n)|x_(j)|^(2)\|A\ |_(F)^(2)=\|A\|_(F)^(2)\|x\|_(2)^(2).)- Субмножественост: ‖ A B ‖ F ≤ ‖ A ‖ F ‖ B ‖ F (\displaystyle \|AB\|_(F)\leq \|A\|_(F)\|B\|_(F)), като ‖ A B ‖ F 2 = ∑ i , j | ∑ k a i k b k j | 2 ≤ ∑ i , j (∑ k | a i k | | b k j |) 2 ≤ ∑ i , j (∑ k | a i k | 2 ∑ k | b k j | 2) = ∑ i , k | a i k | 2 ∑ k , j | b k j | 2 = ‖ A ‖ F 2 ‖ B ‖ F 2 (\displaystyle \|AB\|_(F)^(2)=\sum _(i,j)\left|\sum _(k)a_(ik) b_(kj)\right|^(2)\leq \sum _(i,j)\left(\sum _(k)|a_(ik)||b_(kj)|\right)^(2)\ leq \sum _(i,j)\left(\sum _(k)|a_(ik)|^(2)\sum _(k)|b_(kj)|^(2)\right)=\sum _(i,k)|a_(ik)|^(2)\sum _(k,j)|b_(kj)|^(2)=\|A\|_(F)^(2)\| B\|_(F)^(2)).
- ‖ A ‖ F 2 = t r A ∗ A = t r A A ∗ (\displaystyle \|A\|_(F)^(2)=\mathop (\rm (tr)) A^(*)A=\ mathop (\rm (tr)) AA^(*)), където t r A (\displaystyle \mathop (\rm (tr)) A)- матрична следа A (\displaystyle A), A ∗ (\displaystyle A^(*))е ермитова конюгирана матрица.
- ‖ A ‖ F 2 = ρ 1 2 + ρ 2 2 + ⋯ + ρ n 2 (\displaystyle \|A\|_(F)^(2)=\rho _(1)^(2)+\rho _ (2)^(2)+\dots +\rho _(n)^(2)), където ρ 1 , ρ 2 , … , ρ n (\displaystyle \rho _(1),\rho _(2),\dots ,\rho _(n))- единични стойности на матрицата A (\displaystyle A).
- ‖ A ‖ F (\displaystyle \|A\|_(F))не се променя при умножаване на матрица A (\displaystyle A)наляво или надясно върху ортогонални (унитарни) матрици.
Модул максимум
Максималната норма на модул е друг частен случай на p-нормата за стр = ∞ .
‖ A ‖ max = max ( | a i j | ). (\displaystyle \|A\|_(\text(max))=\max\(|a_(ij)|\).)Норм Шатън
Съгласуваност на матричните и векторните норми
Матрица норма ‖ ⋅ ‖ a b (\displaystyle \|\cdot \|_(ab))на K m × n (\displaystyle K^(m\times n))Наречен съгласи сес нормите ‖ ⋅ ‖ a (\displaystyle \|\cdot \|_(a))на K n (\displaystyle K^(n))и ‖ ⋅ ‖ b (\displaystyle \|\cdot \|_(b))на K m (\displaystyle K^(m)), ако:
‖ A x ‖ b ≤ ‖ A ‖ a b ‖ x ‖ a (\displaystyle \|Ax\|_(b)\leq \|A\|_(ab)\|x\|_(a))за всякакви A ∈ K m × n , x ∈ K n (\displaystyle A\in K^(m\times n),x\in K^(n)). По конструкция операторната норма е в съответствие с оригиналната векторна норма.
Примери за последователни, но не подчинени матрични норми:
Еквивалентност на нормите
Всички норми в космоса K m × n (\displaystyle K^(m\times n))са еквивалентни, тоест за всякакви две норми ‖ . α (\displaystyle \|.\|_(\alpha))и ‖ . ‖ β (\displaystyle \|.\|_(\beta))и за всяка матрица A ∈ K m × n (\displaystyle A\in K^(m\times n))двойното неравенство е вярно.
 Играта "Skyrim": всички писъци Skyrim крещят от 4 думи
Играта "Skyrim": всички писъци Skyrim крещят от 4 думи The Elder Scrolls V: Skyrim
The Elder Scrolls V: Skyrim The Elder Scrolls V: Skyrim Walkthrough
The Elder Scrolls V: Skyrim Walkthrough