Положення рівноваги пружинного маятника. Коливання пружинного маятника
Пружинний маятник є матеріальною точкою масою, прикріплену до абсолютно пружної невагомої пружини з жорсткістю.  . Розрізняють два найпростіші випадки: горизонтальний (рис.15, а) і вертикальний (рис.15, б) маятники.
. Розрізняють два найпростіші випадки: горизонтальний (рис.15, а) і вертикальний (рис.15, б) маятники.
а)
Горизонтальний маятник(Рис. 15, а). При зміщенні вантажу  із положення рівноваги
із положення рівноваги  на величину
на величину  на нього діє у горизонтальному напрямку повертаюча пружна сила
на нього діє у горизонтальному напрямку повертаюча пружна сила
 (Закон Гука).
(Закон Гука).
Передбачається, що горизонтальна опора, по якій ковзає вантаж  при своїх коливаннях абсолютно гладка (тертя немає).
при своїх коливаннях абсолютно гладка (тертя немає).
б) Вертикальний маятник(Рис.15, б). Положення рівноваги у разі характеризується умовою:

де  - величина пружної сили, що діє на вантаж
- величина пружної сили, що діє на вантаж  при статичному розтягуванні пружини на
при статичному розтягуванні пружини на  під дією сили тяжіння вантажу
під дією сили тяжіння вантажу  .
.
|
а |
|


Рис.15. Пружинний маятник: а– горизонтальний та б– вертикальний
Якщо розтягнути пружину і відпустити вантаж, він почне здійснювати вертикальні коливання. Якщо усунення в якийсь момент часу буде  ,
то сила пружності запишеться тепер як
,
то сила пружності запишеться тепер як  .
.
В обох розглянутих випадках пружинний маятник здійснює гармонічні коливання з періодом
 (27)
(27)
та циклічною частотою
 .
(28)
.
(28)
На прикладі розгляду пружинного маятникаможна дійти невтішного висновку у тому, що гармонійні коливання – це рух, викликане силою, зростаючою пропорційно зміщенню  . Таким чином, якщо повертаюча сила на вигляд нагадує закон Гука
. Таким чином, якщо повертаюча сила на вигляд нагадує закон Гука
 (вона отримала назвуквазіпружної сили
), то система повинна здійснювати гармонійні коливання.У момент проходження положення рівноваги на тіло не діє сила, що повертає, проте, тіло за інерцією проскакує положення рівноваги і повертає сила змінює напрямок на протилежне.
(вона отримала назвуквазіпружної сили
), то система повинна здійснювати гармонійні коливання.У момент проходження положення рівноваги на тіло не діє сила, що повертає, проте, тіло за інерцією проскакує положення рівноваги і повертає сила змінює напрямок на протилежне.
Математичний маятник
Рис.16. Математичний маятник
 , що робить малі коливання під впливом сили тяжіння (рис. 16).
, що робить малі коливання під впливом сили тяжіння (рис. 16).
Коливання такого маятника при малих кутах відхилення  (що не перевищують 5º) можна вважати гармонійними, і циклічна частота математичного маятника:
(що не перевищують 5º) можна вважати гармонійними, і циклічна частота математичного маятника:
 ,
(29)
,
(29)
а період:
 .
(30)
.
(30)
2.3. Енергія тіла при гармонійних коливаннях
Енергія, повідомлена коливальній системі при початковому поштовху, буде періодично перетворюватися: потенційна енергія деформованої пружини переходитиме в кінетичну енергію вантажу, що рухається, і назад.
Нехай пружинний маятник здійснює гармонічні коливання з початковою фазою  , тобто.
, тобто.  (Рис.17).
(Рис.17).

Рис.17. Закон збереження механічної енергії
при коливаннях пружинного маятника
При максимальному відхиленні вантажу від рівноваги повна механічна енергія маятника (енергія деформованої пружини з жорсткістю  ) дорівнює
) дорівнює  . При проходженні положення рівноваги (
. При проходженні положення рівноваги (  )
потенційна енергіяпружини стане рівною нулю, і повна механічна енергія коливальної системи визначиться як
)
потенційна енергіяпружини стане рівною нулю, і повна механічна енергія коливальної системи визначиться як  .
.
На рис.18 представлені графіки залежностей кінетичної, потенційної та повної енергії у випадках, коли гармонійні коливання описуються тригонометричними функціями синуса (пунктирна лінія) або косинуса (суцільна лінія).

Рис.18. Графіки тимчасової кінетичної залежності
та потенційної енергії при гармонійних коливаннях
З графіків (рис.18) випливає, що частота зміни кінетичної та потенційної енергії вдвічі вища за власну частоту гармонійних коливань.
Коливальним називається будь-який рух, що періодично повторюється. Тому залежності координати та швидкості тіла від часу при коливаннях описуються періодичними функціями часу. У шкільному курсіфізики розглядаються такі коливання, в яких залежності та швидкості тіла являють собою тригонометричні функції ![]() ,
, ![]() або їхню комбінацію, де - деяке число. Такі коливання називаються гармонійними (функції
або їхню комбінацію, де - деяке число. Такі коливання називаються гармонійними (функції ![]() і
і ![]() часто називають гармонійними функціями). Для вирішення завдань на коливання, що входять до програми єдиного державного іспитуз фізики, потрібно знати визначення основних характеристик коливального руху: амплітуди, періоду, частоти, кругової (або циклічної) частоти та фази коливань. Дамо ці визначення і зв'яжемо перераховані величини з параметрами залежності координати тіла від часу, яка у разі гармонійних коливань завжди може бути представлена у вигляді
часто називають гармонійними функціями). Для вирішення завдань на коливання, що входять до програми єдиного державного іспитуз фізики, потрібно знати визначення основних характеристик коливального руху: амплітуди, періоду, частоти, кругової (або циклічної) частоти та фази коливань. Дамо ці визначення і зв'яжемо перераховані величини з параметрами залежності координати тіла від часу, яка у разі гармонійних коливань завжди може бути представлена у вигляді
де , І - деякі числа.
Амплітудою коливань називається максимальне відхилення тіла, що коливається, від положення рівноваги. Оскільки максимальне і мінімальне значення косинуса (11.1) дорівнює ±1, то амплітуда коливань тіла, що робить коливання (11.1), дорівнює величині . Період коливань – це мінімальний час, через який рух тіла повторюється. Для залежності (11.1) період можна встановити з таких міркувань. Косінус - періодична функціяз періодом. Тому рух повністю повторюється через таке значення, що. Звідси отримуємо
Круговою (або циклічною) частотою коливань називається кількість коливань, що здійснюються за одиниць часу. З формули (11.3) укладаємо, що круговою частотою є величина формули (11.1).
Фазою коливань називається аргумент тригонометричної функції, що описує залежність координати від часу. З формули (11.1) бачимо, що фаза коливань тіла, рух якого описується залежністю (11.1), дорівнює  . Значення фази коливань у час = 0 називається початкової фазою. Для залежності (11.1) початкова фаза коливань дорівнює величині. Очевидно, початкова фаза коливань залежить від вибору початку відліку часу (моменту = 0), який є умовним. Зміною початку відліку часу початкова фаза коливань завжди може бути «зроблена» рівною нулю, а синус у формулі (11.1) «перетворений» на косинус або навпаки.
. Значення фази коливань у час = 0 називається початкової фазою. Для залежності (11.1) початкова фаза коливань дорівнює величині. Очевидно, початкова фаза коливань залежить від вибору початку відліку часу (моменту = 0), який є умовним. Зміною початку відліку часу початкова фаза коливань завжди може бути «зроблена» рівною нулю, а синус у формулі (11.1) «перетворений» на косинус або навпаки.
 До програми єдиного державного іспиту входить також знання формул для частоти коливань пружинного та математичного маятників. Пружинним маятником прийнято називати тіло, яке може коливати на гладкій горизонтальній поверхні під дією пружини, другий кінець якої закріплений (лівий малюнок). Математичним маятником називається масивне тіло, розмірами якого можна знехтувати, що робить коливання на довгій, невагомій та нерозтяжній нитці (правий малюнок). Назва цієї системи – «математичний маятник» пов'язана з тим, що вона є абстрактною. математичнумодель реального ( фізичного) маятника. Необхідно пам'ятати формули для періоду (або частоти) коливань пружинного та математичного маятників. Для пружинного маятника
До програми єдиного державного іспиту входить також знання формул для частоти коливань пружинного та математичного маятників. Пружинним маятником прийнято називати тіло, яке може коливати на гладкій горизонтальній поверхні під дією пружини, другий кінець якої закріплений (лівий малюнок). Математичним маятником називається масивне тіло, розмірами якого можна знехтувати, що робить коливання на довгій, невагомій та нерозтяжній нитці (правий малюнок). Назва цієї системи – «математичний маятник» пов'язана з тим, що вона є абстрактною. математичнумодель реального ( фізичного) маятника. Необхідно пам'ятати формули для періоду (або частоти) коливань пружинного та математичного маятників. Для пружинного маятника
де - Довжина нитки, - прискорення вільного падіння. Розглянемо застосування цих термінів і законів з прикладу розв'язання задач.
Щоб знайти циклічну частоту коливань вантажу в Завдання 11.1.1знайдемо спочатку період коливань, та був скористаємося формулою (11.2). Оскільки 10 м 28 с – це 628 с, і за цей час вантаж здійснює 100 коливань, період коливань вантажу дорівнює 6,28 с. Тому циклічна частота коливань дорівнює 1 c -1 (відповідь 2 ). У задачі 11.1.2вантаж за 600 с здійснив 60 коливань, тому частота коливань - 0,1 с -1 (відповідь 1 ).
Щоб зрозуміти, який шлях пройдевантаж за 2,5 періоду ( Завдання 11.1.3), простежимо за його рухом. Через період вантаж повернеться назад до точки максимального відхилення, здійснивши повне коливання. Тому за цей час вантаж пройде відстань, рівне чотирьом амплітудам: до положення рівноваги - одна амплітуда, від положення рівноваги до точки максимального відхилення в інший бік - друга, назад у положення рівноваги - третя, положення рівноваги в початкову точку - четверта. За другий період вантаж знову пройде чотири амплітуди, а за половину періоду, що залишилися, - дві амплітуди. Тому пройдений шлях дорівнює десяти амплітудам (відповідь 4 ).
Величина переміщення тіла – відстань від початкової точки до кінцевої. За 2,5 періоду в задачі 11.1.4тіло встигне здійснити два повні і половину повного коливання, тобто. виявиться на максимальному відхиленні, але з іншого боку положення рівноваги. Тому величина переміщення дорівнює двом амплітудам (відповідь 3 ).
За визначенням фаза коливань - це аргумент тригонометричної функції, якою описується залежність координати тіла, що коливається від часу. Тому правильна відповідь у задачі 11.1.5 - 3 .
Період – це час повного коливання. Це означає, що повернення тіла назад у ту ж точку, з якої тіло почало рух, ще не означає, що пройшов період: тіло має повернутися в ту саму точку з тією ж швидкістю. Наприклад, тіло, почавши коливання з положення рівноваги, за період встигне відхилитися на максимальну величину в один бік, повернутися назад, відхилиться на максимум в іншу сторону і знову повернутися назад. Тому за період тіло встигне двічі відхилитися на максимальну величину від положення рівноваги та повернутися назад. Отже, проходження від положення рівноваги до точки максимального відхилення ( завдання 11.1.6) тіло витрачає четверту частину періоду (відповідь 3 ).
Гармонічними називаються такі коливання, при яких залежність координати тіла, що коливається, від часу описується тригонометричною (синус або косинус) функцією часу. У задачі 11.1.7такими є функції і , незважаючи на те, що параметри, що входять до них, позначені як 2 і 2 . Функція ж – тригонометрична функція квадрата часу. Тому гармонійними є коливання тільки величин і (відповідь 4 ).
При гармонійних коливаннях швидкість тіла змінюється згідно із законом  , де - Амплітуда коливань швидкості (початок відліку часу обрано так, щоб початкова фаза коливань дорівнювала б нулю). Звідси знаходимо залежність кінетичної енергіїтіла від часу
, де - Амплітуда коливань швидкості (початок відліку часу обрано так, щоб початкова фаза коливань дорівнювала б нулю). Звідси знаходимо залежність кінетичної енергіїтіла від часу  (Завдання 11.1.8). Використовуючи далі відому тригонометричну формулу, отримуємо
(Завдання 11.1.8). Використовуючи далі відому тригонометричну формулу, отримуємо
З цієї формули випливає, що кінетична енергія тіла змінюється при гармонійних коливаннях також за гармонійним законом, але з подвоєною частотою (відповідь 2 ).
За співвідношенням між кінетичною енергією вантажу та потенційною енергією пружини ( Завдання 11.1.9) легко простежити з таких міркувань. Коли тіло відхилено на максимальну величину від положення рівноваги, швидкість тіла дорівнює нулю, і, отже, потенційна енергія пружини більша за кінетичну енергію вантажу. Навпаки, коли тіло проходить положення рівноваги, потенційна енергія пружини дорівнює нулю, і, отже, кінетична енергія більша за потенційну. Тому між проходженням положення рівноваги та максимальним відхиленням кінетична та потенційна енергія один раз порівнюються. А оскільки за період тіло чотири рази проходить від положення рівноваги до максимального відхилення або назад, то за період кінетична енергія вантажу та потенційна енергія пружини порівнюються один з одним чотири рази (відповідь 2 ).
Амплітуду коливань швидкості ( завдання 11.1.10) Найпростіше знайти за законом збереження енергії. У точці максимального відхилення енергія коливальної системи дорівнює потенційній енергії пружини  , де - Коефіцієнт жорсткості пружини, - Амплітуда коливань. При проходженні положення рівноваги енергія тіла дорівнює кінетичній енергії
, де - Коефіцієнт жорсткості пружини, - Амплітуда коливань. При проходженні положення рівноваги енергія тіла дорівнює кінетичній енергії  , де - маса тіла, - швидкість тіла при проходженні положення рівноваги, яка є максимальною швидкістютіла в процесі коливань і, отже, є амплітудою коливань швидкості. Прирівнюючи ці енергії, знаходимо
, де - маса тіла, - швидкість тіла при проходженні положення рівноваги, яка є максимальною швидкістютіла в процесі коливань і, отже, є амплітудою коливань швидкості. Прирівнюючи ці енергії, знаходимо
(відповідь 4 ).
З формули (11.5) укладаємо ( Завдання 11.2.2), що від маси математичного маятника його період не залежить, а при збільшенні довжини в 4 рази період коливань збільшується в 2 рази (відповідь 1 ).
Годинник - це коливальний процес, який використовується для вимірювання інтервалів часу ( Завдання 11.2.3). Слова годинник «поспішають» означає, що період цього процесу менше тогояким він має бути. Тому для уточнення ходу цього годинника необхідно збільшити період процесу. Згідно з формулою (11.5) для збільшення періоду коливань математичного маятника необхідно збільшити його довжину (відповідь 3 ).
Щоб знайти амплітуду коливань у задачі 11.2.4необхідно уявити залежність координати тіла від часу у вигляді однієї тригонометричної функції. Для цієї функції це можна зробити за допомогою введення додаткового кута. Помножуючи і поділяючи цю функцію на  та використовуючи формулу додавання тригонометричних функцій, отримаємо
та використовуючи формулу додавання тригонометричних функцій, отримаємо
|

де - такий кут, що  . З цієї формули випливає, що амплітуда коливань тіла -
. З цієї формули випливає, що амплітуда коливань тіла -  (відповідь 4
).
(відповідь 4
).
Добридень!
Все досить просто. Зараз я, можливо, скажу дещо складних слівале потім постараюся роз'яснити їх зміст. Для простоти викладу йтиметься про одновимірний випадок, на випадок багатьох ступенів свободи все легко узагальнюється.
Отже, Головна задачаМеханіки --- знайти залежність координати тіла від часу, тобто, по суті, знайти деяку функцію, яка кожному моменту зіставляє деяке значення координати. Будь-який рух ми описуємо за допомогою другого закону Ньютона. Цей закон включає прискорення, яке є другою похідною координати тіла за часом, і сила, яка зазвичай залежить від самої координати. Також сила може залежати від швидкості тіла, тобто від першої похідної координати часу. Таким чином, з математичної точкизору другого закону Ньютона представляє деяке співвідношення між координатою, її першою і другою похідними. Таке співвідношення називається в математиці диференціальне рівняння. Старша похідна, що входить у таке рівняння, - друга. Математика каже, що розв'язання такого рівняння, тобто загальний виглядфункції, що задовольняє наше співвідношення, залежить від двох довільних постійних, які неможливо визначити з рівняння. Ці довільні постійні визначаються кожному за конкретного випадку, наприклад, з допомогою про початкових умов. Тобто щоб точно зрозуміти, як буде рухатися тіло, потрібно знати не тільки, які сили на нього діють, але і які його початкова координата і швидкість. Дві довільні константи у рішенні підбираються таким чином, щоб отримана нами функція та її похідна (тобто швидкість) початковий моментчасу мали задані значення.
Це абсолютно загальна ситуація. Згадайте, коли ми говоримо про рух тіла з постійним прискоренням, щоб точно задати рух нам потрібно саме два числа, початкова координата і початкова швидкість.
Те саме справедливо і для вагання. Коливання конкретного маятника (тобто маятника із заданою власною частотою) визначається також двома числами. Зазвичай рішення рівняння маятника, одержуваного з другого закону Ньютона, записують як .
Тут і грають якраз роль довільних постійних, які треба визначати з початкових умов. Порахуємо швидкість: . Нехай нам відомо, що в нульовий моментчасу координата і швидкість маятника дорівнювали і . Розв'язавши систему звичайних рівнянь, можна знайти конкретні вирази для і через і.
Не наводитиму відповіді в загальному випадкуЯкщо ви захочете, то легко зробите це самі. Розповім тільки про конкретні випадки. Нехай, наприклад, відомо, що у нульовий момент часу тіло перебуває у становищі рівноваги (тобто ), яке швидкість дорівнює своїй максимальній величині (тобто ). Тоді отримуємо для конкретного випадку, що система рівнянь набуває вигляду: . З першого рівняння відразу зрозуміло, що (першому рівнянню, звичайно, задовольняє і умова, але тоді наше рішення вийде нульовим, а це не влаштовує). Друге тоді набуває вигляду: , звідки . Таким чином ми знайшли вирази для обох постійних. У результаті маємо: . При цьому для прискорення виходить. Якщо тепер позначити через звичніший вираз для амплітуди , вийдуть більш звичні формули.
Розглянемо ще один приклад. Нехай тепер вантаж знаходиться в крайньому становищі, Тобто його швидкість дорівнює нулю. Вважатимемо, що від відхилився в негативний бікосі, тобто його координата дорівнює . Тоді рівняння на початкові умовинабувають вигляду: . З другого рівняння. З першого: . Таким чином, координати має: (друга рівність за допомогою формули приведення). Для швидкості: . Для прискорення: .
Конкретні формули залежить від початкових даних. З урахуванням періодичності синусів та косінусів, користуючись різними формуламиПриведення можна з формул прибирати знаки додавати фази і т.д.
Що стосується формули в задачі, там немає частоти, тому що підставлено її конкретне значення:
Вільні коливанняздійснюються під дією внутрішніх силсистеми після того, як система була виведена із положення рівноваги.
Для того щобвільні коливання відбувалися за гармонійним законом, необхідно, щоб сила, яка прагне повернути тіло в положення рівноваги, була пропорційна зміщенню тіла з положення рівноваги і спрямована у бік, протилежний зсуву (див. §2.1):
Сили будь-якої іншої фізичної природи, що задовольняють цій умові, називаються квазіпружними .
Таким чином, вантаж деякої маси m, прикріплений до пружини жорсткості k, другий кінець якої закріплений нерухомо (рис. 2.2.1), становлять систему, здатну здійснювати без тертя вільні гармонічні коливання. Вантаж на пружині називають лінійним гармонічним осцилятором.
Кругова частота ω 0 вільних коливаньвантажу на пружині знаходиться з другого закону Ньютона:
При горизонтальному розташуванні системи пружина-вантаж сила тяжіння, прикладена до вантажу, компенсується силою реакції опори. Якщо вантаж підвішений на пружині, то сила тяжіння спрямована по лінії руху вантажу. У положенні рівноваги пружина розтягнута на величину x 0 , рівну
Тому другий закон Ньютона для вантажу на пружині може бути записаний у вигляді
Рівняння (*) називається рівнянням вільних коливань . Слід звернути увагу на те, що Фізичні властивостіколивальної системи визначають лише власну частоту коливань ω 0 чи період T . Такі параметри процесу коливань, як амплітуда x m і початкова фаза φ 0 визначаються способом, за допомогою якого система була виведена зі стану рівноваги в початковий момент часу.
Якщо, наприклад, вантаж був зміщений із положення рівноваги на відстань Δ lі потім у момент часу t= 0 відпущено без початкової швидкості, то x m = Δ l, φ0 = 0.
Якщо ж вантажу, що знаходився в положенні рівноваги, за допомогою різкого поштовху була повідомлена початкова швидкість ± 0, то ,
Таким чином, амплітуда x m вільних коливань та його початкова фаза φ 0 визначаються початковими умовами .
Існує багато різновидів механічних коливальних систем, у яких використовуються сили пружних деформацій. На рис. 2.2.2 показаний кутовий аналог лінійного гармонійного осцилятора. Горизонтально розташований диск висить на пружній нитці, що закріплена в його центрі мас. При повороті диска на кут θ з'являється момент сил Mупругої деформації кручення:
де I = I C - момент інерції диска щодо осі, що проходить через центр мас, - кутове прискорення.
За аналогією з вантажем на пружині можна отримати:
Вільні вагання. Математичний маятник
Математичним маятникомназивають тіло невеликих розмірів, підвішене на тонкій нерозтяжній нитці, маса якої зневажливо мала порівняно з масою тіла. У положенні рівноваги, коли маятник висить по схилу, сила тяжіння врівноважується силою натягу нитки . При відхиленні маятника з положення рівноваги на деякий кут з'являється дотична складова сили тяжіння F τ = - mg sin φ (рис. 2.3.1). Знак «мінус» у цій формулі означає, що дотична складова спрямована у бік, протилежний відхиленню маятника.
Якщо позначити через xлінійне усунення маятника від положення рівноваги по дузі кола радіусу l, то його кутове зміщення дорівнюватиме φ = x / l. Другий закон Ньютона, записаний для проекцій векторів прискорення та сили на напрям дотичної, дає:
Це співвідношення показує, що математичний маятник є складною. нелінійнусистему, оскільки сила, що прагне повернути маятник у положення рівноваги, пропорційна не зміщенню x, а
Тільки у випадку малих коливаньколи наближеноможна замінити математичним маятником є гармонічним осцилятором, т. е. системою, здатної здійснювати гармонійні коливання. Майже таке наближення справедливе для кутів порядку 15-20 °; при цьому величина відрізняється не більше ніж на 2%. Коливання маятника при великих амплітудах є гармонійними.
Для малих коливань математичного маятника другий закон Ньютона записується як
Ця формула висловлює власну частоту малих коливань математичного маятника .
Отже,
|

Будь-яке тіло, насаджене на горизонтальну вісь обертання, здатне здійснювати в полі тяжіння вільні коливання і, отже, є маятником. Такий маятник прийнято називати фізичним (Рис. 2.3.2). Він відрізняється від математичного лише розподілом мас. У положенні стійкої рівноваги центр мас C фізичного маятниказнаходиться нижче осі обертання на вертикалі, що проходить через вісь. При відхиленні маятника на кут φ виникає момент сили тяжіння, що прагне повернути маятник у положення рівноваги:
і другий закон Ньютона для фізичного маятника набуває вигляду (див. §1.23)
Тут ω 0 - власна частота малих коливань фізичного маятника .
Отже,
Тому рівняння, яке виражає другий закон Ньютона для фізичного маятника, можна записати у вигляді
Остаточно для кругової частоти ω 0 вільних коливань фізичного маятника виходить вираз:
|

Перетворення енергії при вільних механічних коливаннях
При вільних механічних коливанькінетична та потенційна енергії періодично змінюються. При максимальному відхиленні тіла від положення рівноваги його швидкість, а отже, і кінетична енергія перетворюються на нуль. У цьому положенні потенційна енергія тіла, що коливається, досягає максимального значення. Для вантажу на пружині потенційна енергія – це енергія пружних деформацій пружини. Для математичного маятника – це енергія у полі тяжіння Землі.
Коли тіло під час свого руху проходить через положення рівноваги, його швидкість максимальна. Тіло проскакує положення рівноваги згідно із законом інерції. У цей момент воно має максимальну кінетичну і мінімальну потенційну енергію. Збільшення кінетичної енергії відбувається рахунок зменшення потенційної енергії. При подальшому русі починає збільшуватися потенційна енергія за рахунок зменшення кінетичної енергії і т.д.
Таким чином, при гармонійних коливаннях відбувається періодичне перетворення кінетичної енергії на потенційну і навпаки.
Якщо коливальній системі відсутня тертя, то повна механічна енергія при вільних коливаннях залишається незмінною.
Для вантажу на пружині(Див. §2.2):
У реальних умовах будь-яка коливальна система перебуває під впливом сил тертя (опору). При цьому частина механічної енергії перетворюється на внутрішню енергію теплового рухуатомів і молекул, і коливання стають загасаючими (Рис. 2.4.2).
Швидкість загасання коливань залежить від величини сил тертя. Інтервал часу τ, протягом якого амплітуда коливань зменшується в e≈ 2,7 разів, називається часом згасання .
Частота вільних коливань залежить від швидкості загасання коливань. У разі зростання сил тертя власна частота зменшується. Однак, зміна власної частоти стає помітною лише за досить великих сил тертя, коли власні коливання швидко згасають.
Важливою характеристикою коливальної системи, що робить вільні загасаючі коливання, є добротність Q. Цей параметр визначається як число Nповних коливань, які здійснюють система за час згасання τ, помножене на π:
Таким чином, добротність характеризує відносне зменшення енергії коливальної системи через наявність тертя на інтервалі часу, що дорівнює одному періоду коливань.
Вимушені коливання. Резонанс. Автоколивання
Коливання, що відбуваються під впливом зовнішньої періодичної сили, називаються вимушеними.
Зовнішня силаздійснює позитивну роботу та забезпечує приплив енергії до коливальної системи. Вона не дає коливань загасати, незважаючи на дію сил тертя.
Періодична зовнішня сила може змінюватись у часі за різними законами. Особливий інтерес представляє випадок, коли зовнішня сила, що змінюється за гармонічним законом із частотою ω, впливає на коливальну систему, здатну здійснювати власні коливання деякою частотою ω 0 .
Якщо вільні коливання відбуваються на частоті 0, яка визначається параметрами системи, то вимушені коливання, що встановилися, завжди відбуваються на частоті ω зовнішньої сили.
Після початку впливу зовнішньої сили на коливальну систему потрібен деякий час Δ tдля встановлення вимушених коливань. Час встановлення по порядку величини дорівнює часу згасання вільних коливань в коливальній системі.
У початковий момент у коливальній системі збуджуються обидва процеси - вимушені коливання на частоті і вільні коливання на власній частоті 0 . Але вільні коливання згасають через неминучу наявність сил тертя. Тому через деякий час в коливальній системі залишаються тільки стаціонарні коливання на частоті зовнішньої сили, що змушує.
Розглянемо як приклад вимушені коливання тіла на пружині (рис. 2.5.1). Зовнішня сила прикладена до вільного кінця пружини. Вона змушує вільний (лівий на рис. 2.5.1) кінець пружини переміщатися згідно із законом
Якщо лівий кінець пружини зміщений на відстань y, а правий - на відстань xвід їхнього початкового положення, коли пружина була недеформована, то подовження пружини Δ lодно:
У цьому рівнянні сила, що діє на тіло, представлена у вигляді двох доданків. Перший доданок у правій частині - це пружна сила, що прагне повернути тіло в положення рівноваги ( x= 0). Другий доданок - зовнішній періодичний вплив на тіло. Це доданок і називають силою, що змушує.
Рівнянню, що виражає другий закон Ньютона для тіла на пружині за наявності зовнішнього періодичного впливу, можна надати сувору математичну форму, якщо врахувати зв'язок між прискоренням тіла та його координатою: Тоді запишеться у вигляді
Рівняння (**) не враховує дії сил тертя. На відміну від рівняння вільних коливань(*) (див. §2.2) рівняння вимушених коливань(**) Містить дві частоти - частоту ω 0 вільних коливань і частоту ω змушує сили.
Вимушені коливання вантажу, що встановилися, на пружині відбуваються на частоті зовнішнього впливуза законом
|
Амплітуда вимушених коливань x m і початкова фаза θ залежать від співвідношення частот 0 і ω і від амплітуди y m зовнішньої сили.
На дуже низьких частотах, коли<< ω 0 , движение тела массой m, Прикріплений до правого кінця пружини, повторює рух лівого кінця пружини. При цьому x(t) = y(t), і пружина залишається практично недеформованою. Зовнішня сила прикладена до лівого кінця пружини, роботи не здійснює, тому модуль цієї сили при ω<< ω 0 стремится к нулю.
Якщо частота ω зовнішньої сили наближається до власної частоти ω 0 виникає різке зростання амплітуди вимушених коливань. Це явище називається резонансом . Залежність амплітуди x m вимушених коливань від частоти ω змушує сили називається резонансною характеристикоюабо резонансної кривої(Рис. 2.5.2).
При резонансі амплітуда x m коливання вантажу може у багато разів перевершувати амплітуду y m коливань вільного (лівого) кінця пружини, спричиненого зовнішнім впливом. За відсутності тертя амплітуда вимушених коливань при резонансі має необмежено зростати. У реальних умовах амплітуда вимушених коливань, що встановилися, визначається умовою: робота зовнішньої сили протягом періоду коливань повинна дорівнювати втратам механічної енергії за той же час через тертя. Чим менше тертя (тобто чим вище добротність Qколивальної системи), тим більше амплітуда вимушених коливань при резонансі.
У коливальних систем з не дуже високою добротністю (< 10) резонансная частота несколько смещается в сторону низких частот. Это хорошо заметно на рис. 2.5.2.
Явище резонансу може спричинити руйнування мостів, будівель та інших споруд, якщо власні частоти їх коливань збігатимуться з частотою сили, що періодично діє, що виникла, наприклад, через обертання незбалансованого мотора.
Вимушені коливання – це незагасаючіколивання. Неминучі втрати енергії на тертя компенсуються підведенням енергії від зовнішнього джерела сили, що періодично діє. Існують системи, в яких незатухаючі коливання виникають не за рахунок періодичного зовнішнього впливу, а в результаті наявної у таких систем здатності регулювати надходження енергії від постійного джерела. Такі системи називаються автоколивальними, а процес незагасаних коливань у таких системах - автоколиваннями . В авто коливальній системі можна виділити три характерні елементи - коливальна система, джерело енергії та пристрій зворотного зв'язку між коливальною системою та джерелом. Як коливальної системи може бути використана будь-яка механічна система, здатна здійснювати власні затухаючі коливання (наприклад, маятник настінного годинника).
Джерелом енергії може бути енергія деформація пружини чи потенційна енергія вантажу на полі тяжкості. Пристрій зворотного зв'язку є деяким механізмом, за допомогою якого автоколивальна система регулює надходження енергії від джерела. На рис. 2.5.3 зображено схему взаємодії різних елементів автоколивальної системи.
Прикладом механічної автоколивальної системи може служити годинниковий механізм анкернимходом (рис. 2.5.4). Ходове колесо з косими зубами жорстко скріплене із зубчастим барабаном, через який перекинутий ланцюжок із гирей. На верхньому кінці маятника закріплено анкер(якірок) з двома пластинками з твердого матеріалу, вигнутими по дузі кола з центром на осі маятника. У ручному годиннику гиря замінюється пружиною, а маятник - балансиром - маховичком, скріпленим зі спіральною пружиною. Балансир здійснює крутильні коливання довкола своєї осі. Коливальною системою в годиннику є маятник або балансир.
Джерелом енергії - піднята вгору гиря чи заведена пружина. Пристроєм, за допомогою якого здійснюється зворотний зв'язок, є анкер, що дозволяє ходовому колесу повернутися на один зубець за півперіод. Зворотний зв'язок здійснюється взаємодією анкера із ходовим колесом. При кожному коливанні маятника зубець ходового колеса штовхає анкерну вилку у бік руху маятника, передаючи йому деяку порцію енергії, яка компенсує втрати енергії на тертя. Таким чином, потенційна енергія гирі (або закрученої пружини) поступово окремими порціями передається маятнику.
Механічні автоколивальні системи широко поширені в навколишньому житті і в техніці. Автоколивання здійснюють парові машини, двигуни внутрішнього згоряння, електричні дзвінки, струни смичкових музичних інструментів, повітряні стовпи в трубах духових інструментів, голосові зв'язки під час розмови чи співу тощо.
 |
| Малюнок 2.5.4. Часовий механізм із маятником. |
Коли в школі проходять коливання, то їх ілюструють двома найпростішими прикладами: грузик на пружинці та математичний маятник (тобто точковий грузик на нерозтяжній нитці) у полі важкості. В обох випадках у коливаннях спостерігається важлива закономірність: їх період не залежить від амплітуди – принаймні доти, поки ця амплітуда залишається малою, – а визначається лише механічними властивостями системи.
А тепер давайте сумісний ці два приклади і розглянемо коливання грузика, підвішеного на розтяжній пружинці в полі тяжіння (рис. 1).
Для простоти ми нехтуємо третім виміром і вважаємо, що цей пружинний маятник коливається в площині малюнка. В цьому випадку грузик (який теж вважається точковим) може рухатися у вертикальній площині у довільному напрямку, а не тільки вгору-вниз або вліво-вправо, як зображено на рис. 2. Але якщо знову обмежитися лише малими відхиленнями від положення рівноваги, то горизонтальні та вертикальні коливання відбуваються практично незалежно, зі своїми періодами T xі T y.
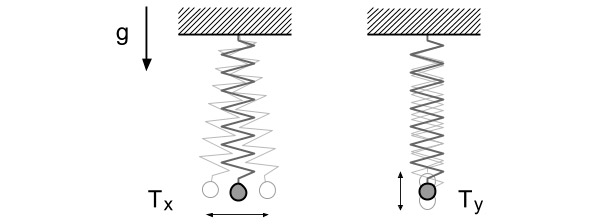
Здавалося б, якщо ці коливання визначаються зовсім різними силами і характеристиками системи, то їх періоди можуть бути довільними, ніяк не пов'язаними один з одним. Виявляється – ні!
Завдання
Доведіть, що у такого маятника період горизонтальних коливань завжди більший за період вертикальних: T x > T y.
Підказка
Завдання може спочатку здивувати тим, що в ній начебто нічого й не дано, а щось при цьому потрібно довести. Але нічого страшного тут нема. Коли завдання формулюється таким чином, це означає, що ви можете для себе ввести якісь позначення, які вам потрібні, порахувати з ними те, що потрібно, а потім дійти висновку, що вже не залежитьвід цих величин. Виконайте це для даної задачі. Візьміть формули для періодів коливання, подумайте, що за величини в них входять, і порівняйте два періоди один з одним, поділивши один на одного.
Рішення
Період коливання вантажу маси mна пружинці жорсткості kта довжини L 0 складає
 .
.
Ця формула не змінюється і в тому випадку, якщо вантаж підвішений у полі тяжкості з прискоренням вільного падіння g. Звичайно, положення рівноваги грузика зміститься вниз на висоту Δ L = mg/k- саме за такого подовження пружинки сила пружності компенсує силу тяжкості. Але період вертикальних коливань щодо цього нового положення рівноваги із розтягнутою пружинкою залишиться тим самим.
Період горизонтальних коливань розтягнутого маятника виражається через прискорення вільного падіння gі його повнудовжину L = L 0 +Δ L:
 .
.
Саме завдяки додатковому розтягуванню у полі тяжкості ми з'ясовуємо, що

Ось і все рішення.
Післямова

Незважаючи на свою простоту, маятник на пружинці - система, досить багата на явища. Це один із найпростіших прикладів симпатичного явища – резонансу Фермі. Полягає воно ось у чому. Взагалі кажучи, якщо вантаж якось відтягнути і відпустити, то він вагатиметься і по вертикалі, і по горизонталі. Ці два типи коливання просто накладатимуться і не заважатимуть один одному. Але якщо періоди вертикальних та горизонтальних коливань пов'язані співвідношенням T x = 2T y, то горизонтальні і вертикальні коливання, немов проти своєї волі, почнуть поступово перетворюватися один на одного, як на анімації праворуч. Енергія коливань буде перекачуватися з вертикальних коливань в горизонтальні і навпаки.
Виглядає так: ви відтягуєте грузик вниз і відпускаєте його. Він спочатку вагається тільки вгору-вниз, потім сам по собі починає розгойдуватися в сторони, на якусь мить коливання стає майже повністю горизонтальним, а потім знову повертається до вертикального. Дивно, але строго вертикальне коливання виявляється нестійким.
Пояснення цього чудового ефекту, а також магічного співвідношення T x:T y= 2:1, ось у чому. Позначимо через xі yвідхилення вантажу від положення рівноваги (вісь yспрямована вгору). За такого відхилення потенційна енергія зростає на величину
Це – точна формула, вона годиться для будь-яких відхилень, великих та маленьких. Але якщо xі yмалі, суттєво менше L, то вираз приблизно дорівнює
плюс інші доданки, що містять ще більші ступені відхилень. Величини U yі U x- це звичайні потенційні енергії, з яких виходять вертикальні та горизонтальні коливання. А ось виділена синім кольором величина U xy- це особлива добавка, яка породжує взаємодіяміж цими ваганнями. Завдяки цій невеликій взаємодії коливання по вертикалі впливають на горизонтальні коливання і навпаки. Це стає зовсім прозоро, якщо провести обчислення далі та написати рівняння коливань по горизонталі та вертикалі:

де введено позначення
Без синьої добавки у нас були б звичайні незалежні коливання по вертикалі та горизонталі з частотами ω yі ω x. Ця добавка відіграє роль змушує сили, що додатково розгойдує коливання. Якщо частоти ω yі ω xдовільні, то ця маленька сила не призводить до жодного суттєвого ефекту. Але якщо виконується співвідношення ω y = 2ω x, настає резонанс: сила, що змушує, для обох типів коливань містить компоненту з тією самою частотою, як і саме коливання. В результаті ця сила повільно, але неухильно розгойдує один тип коливань і пригнічує інший. Саме так горизонтальні та вертикальні коливання перетікають одна в одну.

Додаткові краси виникають, якщо в цьому прикладі по-чесному врахувати третій вимір. Вважатимемо, що вантаж може стискати-розтискати пружинку по вертикалі і хитатися, як маятник, у двох горизонтальних напрямках. Тоді, при виконанні умови резонансу, при погляді зверху вантаж виписує зірчасту траєкторію, як, наприклад, на рис. 3. Так виходить тому, що площина коливання не залишається нерухомою, а повертається - але не плавно, а ніби стрибками. Поки вага йде з боку в бік, ця площина більш-менш тримається, а поворот відбувається за той короткий проміжок, коли коливання майже вертикально. Пропонуємо читачам самостійно подумати, які причини цієї поведінки та від чого залежить кут повороту площини. А охочі зануритися з головою в це досить глибоке завдання можуть погортати статтю Stepwise Precession of the Resonant Swinging Spring, в якій не лише наведено докладний аналіз завдання, а й розповідається про її історію та зв'язок цього завдання з іншими розділами фізики, зокрема з атомною фізикою.
 Дядько Ваня сюжет п'єси. "Дядя Ваня. Ставлення до професора оточуючих
Дядько Ваня сюжет п'єси. "Дядя Ваня. Ставлення до професора оточуючих Крихітка Цахес по прозвищу Циннобер
Крихітка Цахес по прозвищу Циннобер Майков, Аполлон Миколайович – коротка біографія
Майков, Аполлон Миколайович – коротка біографія