Millised jõud mõjutavad matemaatilise pendli liikumist. Pendli saladused
Matemaatiline pendel nimetatakse materiaalseks punktiks, mis on riputatud vedrustuse küljes oleva kaaluta ja venimatu keerme küljes ning paikneb gravitatsiooni (või muu jõu) väljas.
Uurime matemaatilise pendli võnkumisi inertsiaalses tugisüsteemis, mille suhtes tema vedrustuspunkt on puhkeasendis või liigub ühtlaselt sirgjooneliselt. Jätame tähelepanuta õhutakistuse jõu (ideaalne matemaatiline pendel). Esialgu on pendel puhkeasendis C. Sel juhul kompenseeritakse vastastikku talle mõjuv gravitatsioonijõud ja keerme elastsusjõud F?ynp.
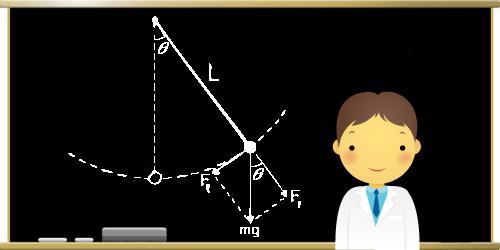
Toome pendli tasakaaluasendist välja (painides selle näiteks asendisse A) ja laseme tal minna ilma algkiiruseta (joonis 1). Sel juhul jõud ja ei tasakaalusta üksteist. Pendlile mõjuv gravitatsiooni tangentsiaalne komponent annab sellele tangentsiaalse kiirenduse a?? (kogukiirenduse komponent, mis on suunatud piki matemaatilise pendli trajektoori puutujat) ja pendel hakkab absoluutväärtuses suureneva kiirusega liikuma tasakaaluasendi poole. Gravitatsiooni tangentsiaalne komponent on seega taastav jõud. Gravitatsiooni normaalne komponent on suunatud piki niiti elastsusjõu vastu. Resultantjõud ja ütleb pendli normaalkiirenduse, mis muudab kiirusvektori suunda ja pendel liigub mööda kaare ABCD.

Mida lähemale pendel läheneb tasakaaluasendile C, seda väiksemaks muutub tangentsiaalkomponendi väärtus. Tasakaalusendis on see võrdne nulliga ja kiirus saavutab maksimaalse väärtuse ning pendel liigub inertsist edasi, tõustes mööda kaare üles. Sel juhul on komponent suunatud kiiruse vastu. Paindenurga a suurenemisega jõumoodul suureneb ja kiirusmoodul väheneb ning punktis D pendli kiirus võrdub nulliga. Pendel peatub hetkeks ja hakkab seejärel liikuma tasakaaluasendile vastupidises suunas. Olles sellest taas inertsi abil läbinud, jõuab pendel aeglustudes punkti A (puudub hõõrdumine), s.o. teeb täie hoo sisse. Pärast seda korratakse pendli liikumist juba kirjeldatud järjekorras.
Saame võrrandi, mis kirjeldab matemaatilise pendli vabavõnkumisi.
Olgu pendel antud ajahetkel punktis B. Selle nihe S tasakaaluasendist sel hetkel on võrdne kaare CB pikkusega (st S = |CB|). Tähistame riputuskeere pikkuseks l ja pendli massiks m.
Joonis 1 näitab, et kus . Väikeste nurkade korral () pendli läbipaine, seega
Selle valemi miinusmärk pannakse seetõttu, et gravitatsiooni tangentsiaalne komponent on suunatud tasakaaluasendisse ja nihet arvestatakse tasakaaluasendist.
Newtoni teise seaduse järgi. Projekteerime selle võrrandi vektorkogused matemaatilise pendli trajektoori puutuja suunas
Nendest võrranditest saame
Matemaatilise pendli dünaamiline liikumisvõrrand. Matemaatilise pendli tangentsiaalne kiirendus on võrdeline selle nihkega ja on suunatud tasakaaluasendisse. Selle võrrandi saab kirjutada kui
![]()
Võrreldes seda harmooniliste võnkumiste võrrandiga ![]() , võime järeldada, et matemaatiline pendel teeb harmoonilisi võnkumisi. Ja kuna pendli vaadeldavad võnked toimusid ainult sisemiste jõudude toimel, olid need pendli vabavõnked. Järelikult on matemaatilise pendli vabavõnkumised väikeste kõrvalekalletega harmoonilised.
, võime järeldada, et matemaatiline pendel teeb harmoonilisi võnkumisi. Ja kuna pendli vaadeldavad võnked toimusid ainult sisemiste jõudude toimel, olid need pendli vabavõnked. Järelikult on matemaatilise pendli vabavõnkumised väikeste kõrvalekalletega harmoonilised.
Tähistage
![]()
Pendli võnkumiste tsükliline sagedus.
Pendli võnkeperiood. Seega
Seda väljendit nimetatakse Huygensi valemiks. See määrab matemaatilise pendli vabavõnkumiste perioodi. Valemist tuleneb, et tasakaaluasendist kõrvalekaldumise väikeste nurkade korral on matemaatilise pendli võnkeperiood:
- ei sõltu selle massist ja võnkumiste amplituudist;
- võrdeline pendli pikkuse ruutjuurega ja pöördvõrdeline vabalangemise kiirenduse ruutjuurega.
See on kooskõlas matemaatilise pendli väikeste võnkumiste eksperimentaalsete seadustega, mille avastas G. Galileo.
Rõhutame, et seda valemit saab kasutada perioodi arvutamiseks, kui samaaegselt on täidetud kaks tingimust:
- pendli võnkumised peaksid olema väikesed;
- pendli riputuspunkt peab olema puhkeasendis või liikuma ühtlaselt sirgjooneliselt inertsiaalse võrdlusraami suhtes, milles see asub.
Kui matemaatilise pendli riputuspunkt liigub kiirendusega, siis muutub keerme tõmbejõud, mis toob kaasa taastava jõu muutumise ning sellest tulenevalt ka võnkesageduse ja perioodi muutumise. Nagu arvutused näitavad, saab pendli võnkeperioodi sel juhul arvutada valemiga
kus on pendli "efektiivne" kiirendus mitteinertsiaalses tugisüsteemis. See võrdub vabalangemise kiirenduse ja vektorile vastupidise vektori geomeetrilise summaga, s.o. seda saab arvutada valemi abil
Matemaatiliseks pendliks (teine nimi on ostsillaator) nimetatakse mehaanilist süsteemi, mis koosneb materiaalsest punktist (kehast), mis ripub venitamatul kaaluta niidil (selle mass on keha raskusega võrreldes tühine) ühtlases gravitatsiooniväljas. . Seda seadet on ka teist tüüpi. Keerme asemel võib kasutada kaaluta varda. Matemaatiline pendel võib selgelt paljastada paljude huvitavate nähtuste olemuse. Väikese võnkeamplituudiga nimetatakse selle liikumist harmooniliseks.
Üldine teave mehaanilise süsteemi kohta
Selle pendli võnkeperioodi valemi tuletas Hollandi teadlane Huygens (1629-1695). Sellele I. Newtoni kaasaegsele meeldis see mehaaniline süsteem väga. Aastal 1656 lõi ta esimese pendelkella. Nad mõõtsid aega nende aegade kohta erakordse täpsusega. Sellest leiutisest sai kõige olulisem etapp füüsiliste katsete ja praktiliste tegevuste arendamisel.
Kui pendel on tasakaaluasendis (rippub vertikaalselt), siis tasakaalustab see niidi pingutusjõu toimel. Lame pendel pikendamatul keermel on kahe vabadusastmega süsteem ühendusega. Kui muudate ainult ühte komponenti, muutuvad kõigi selle osade omadused. Seega, kui niit asendatakse vardaga, on sellel mehaanilisel süsteemil ainult 1 vabadusaste. Millised on matemaatilise pendli omadused? Selles kõige lihtsamas süsteemis tekib kaos perioodilise häire mõjul. Juhul, kui vedrustuspunkt ei liigu, vaid võngub, on pendlil uus tasakaaluasend. Kiirete üles-alla võnkumiste korral omandab see mehaaniline süsteem stabiilse tagurpidi asendi. Tal on ka oma nimi. Seda nimetatakse Kapitza pendliks.
pendli omadused

Matemaatilisel pendlil on väga huvitavad omadused. Neid kõiki kinnitavad teadaolevad füüsikaseadused. Mis tahes muu pendli võnkeperiood sõltub erinevatest asjaoludest, nagu keha suurus ja kuju, vedrustuspunkti ja raskuskeskme vaheline kaugus, massi jaotus selle punkti suhtes. Seetõttu on rippuva keha perioodi määramine üsna keeruline ülesanne. Palju lihtsam on arvutada matemaatilise pendli perioodi, mille valem on toodud allpool. Sarnaste mehaaniliste süsteemide vaatluste tulemusena saab tuvastada järgmised seaduspärasused:
Kui pendli sama pikkuse säilitamisel riputatakse erinevad raskused, osutub nende võnkeperiood samaks, kuigi nende massid on väga erinevad. Seetõttu ei sõltu sellise pendli periood koormuse massist.
Kui süsteemi käivitamisel painutatakse pendlit mitte liiga suurte, vaid erinevate nurkade võrra, siis hakkab see võnkuma sama perioodiga, kuid erineva amplituudiga. Kuni kõrvalekalded tasakaalukeskmest ei ole liiga suured, on võnkumised oma kujul harmoonilistele üsna lähedased. Sellise pendli periood ei sõltu kuidagi võnkeamplituudist. Selle mehaanilise süsteemi seda omadust nimetatakse isokronismiks (tõlkes kreeka keelest "chronos" - aeg, "isos" - võrdne).
Matemaatilise pendli periood
See näitaja tähistab perioodi Hoolimata keerulisest sõnastusest on protsess ise väga lihtne. Kui matemaatilise pendli keerme pikkus on L ja vabalangemise kiirendus on g, siis on see väärtus võrdne:
Väikeste omavõnkumiste periood ei sõltu kuidagi pendli massist ja võnkumiste amplituudist. Sellisel juhul liigub pendel nagu vähendatud pikkusega matemaatiline pendel.
Matemaatilise pendli võnkumised

Matemaatiline pendel võngub, mida saab kirjeldada lihtsa diferentsiaalvõrrandiga:
x + ω2 sin x = 0,
kus x (t) on tundmatu funktsioon (see on radiaanides väljendatud kõrvalekalde nurk alumisest tasakaaluasendist ajahetkel t); ω on positiivne konstant, mis määratakse pendli parameetrite järgi (ω = √g/L, kus g on gravitatsioonikiirendus ja L on matemaatilise pendli (vedrustuse) pikkus.
Väikeste võnkumiste võrrand tasakaaluasendi lähedal (harmooniline võrrand) näeb välja järgmine:
x + ω2 sin x = 0
Pendli võnkuvad liigutused
Väikesi võnkeid tekitav matemaatiline pendel liigub mööda sinusoidi. Teist järku diferentsiaalvõrrand vastab kõigile sellise liikumise nõuetele ja parameetritele. Trajektoori määramiseks peate määrama kiiruse ja koordinaadi, millest seejärel määratakse sõltumatud konstandid:
x \u003d A patt (θ 0 + ωt),
kus θ 0 on algfaas, A on võnkeamplituud, ω on liikumisvõrrandist määratud tsükliline sagedus.
Matemaatiline pendel (suurte amplituudide valemid)
See mehaaniline süsteem, mis teeb oma võnkumisi märkimisväärse amplituudiga, allub keerukamatele liikumisseadustele. Sellise pendli jaoks arvutatakse need järgmise valemiga:
sin x/2 = u * sn(ωt/u),
kus sn on Jacobi siinus, mis u jaoks< 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
kus ε = E/mL2 (mL2 on pendli energia).
Mittelineaarse pendli võnkeperiood määratakse järgmise valemiga:
kus Ω = π/2 * ω/2K(u), K on elliptiline integraal, π - 3,14.

Pendli liikumine mööda separatriksi
Separatriks on dünaamilise süsteemi trajektoor, millel on kahemõõtmeline faasiruum. Matemaatiline pendel liigub mööda seda mitteperioodiliselt. Lõpmatult kaugel ajahetkel kukub see äärmisest ülemisest asendist nullkiirusega küljele, seejärel tõstab ta järk-järgult üles. Lõpuks see peatub, naases algasendisse.
Kui pendli võnke amplituud läheneb arvule π , see näitab, et liikumine faasitasandil läheneb separatrixile. Sel juhul käitub mehaaniline süsteem väikese perioodilise jõu toimel kaootiliselt.
Kui matemaatiline pendel kaldub tasakaaluasendist kõrvale teatud nurga φ võrra, tekib tangentsiaalne raskusjõud Fτ = -mg sin φ. Miinusmärk tähendab, et see tangentsiaalne komponent on suunatud pendli läbipaindest vastupidises suunas. Kui pendli nihet piki raadiusega L ringikaare tähistatakse x-ga, on selle nurknihe võrdne φ = x/L. Teine seadus, mis on projektsioonide ja jõu jaoks, annab soovitud väärtuse:
mg τ = Fτ = -mg sinx/L
Selle seose põhjal on näha, et see pendel on mittelineaarne süsteem, kuna jõud, mis kipub seda tasakaaluasendisse tagasi viima, on alati võrdeline mitte nihkega x, vaid patuga x/L.
Ainult siis, kui matemaatiline pendel teeb väikseid võnkumisi, on see harmooniline ostsillaator. Teisisõnu, sellest saab mehaaniline süsteem, mis on võimeline teostama harmoonilisi vibratsioone. See lähenemine kehtib praktiliselt 15-20° nurkade puhul. Suure amplituudiga pendli võnkumised ei ole harmoonilised.
Newtoni seadus pendli väikeste võnkumiste kohta

Kui antud mehaaniline süsteem teostab väikeseid vibratsioone, näeb Newtoni 2. seadus välja järgmine:
mg τ = Fτ = -m* g/L* x.
Selle põhjal võime järeldada, et matemaatiline pendel on võrdeline selle nihkega miinusmärgiga. See on seisund, mille tõttu süsteem muutub harmooniliseks ostsillaatoriks. Nihke ja kiirenduse vahelise proportsionaalsusteguri moodul on võrdne ringsageduse ruuduga:
ω02 = g/l; ω0 = √g/L.
See valem peegeldab seda tüüpi pendli väikeste võnkumiste loomulikku sagedust. Selle põhjal
T = 2π/ ω0 = 2π√ g/L.
Arvutused energia jäävuse seaduse alusel
Pendli omadusi saab kirjeldada ka energia jäävuse seaduse abil. Sel juhul tuleb arvestada, et pendel gravitatsiooniväljas on võrdne:
E = mg∆h = mgL(1 - cos α) = mgL2sin2 α/2
Kokku võrdub kineetilise või maksimaalse potentsiaaliga: Epmax = Ekmsx = E
Pärast energia jäävuse seaduse kirjutamist võetakse võrrandi parema ja vasaku külje tuletis:
Kuna konstantide tuletis on 0, siis (Ep + Ek)" = 0. Summa tuletis võrdub tuletiste summaga:
Ep" = (mg/L*x2/2)" = mg/2L*2x*x" = mg/L*v + Ek" = (mv2/2) = m/2(v2)" = m/ 2* 2v*v" = mv*α,
seega:
Mg/L*xv + mva = v (mg/L*x + mα) = 0.
Viimase valemi põhjal leiame: α = - g/L*x.
Matemaatilise pendli praktiline rakendamine
Kiirendus varieerub sõltuvalt geograafilisest laiuskraadist, kuna maakoore tihedus ei ole kogu planeedil ühesugune. Seal, kus esineb suurema tihedusega kivimeid, on see mõnevõrra suurem. Geoloogiliseks uurimiseks kasutatakse sageli matemaatilise pendli kiirendust. Seda kasutatakse erinevate mineraalide otsimiseks. Lihtsalt pendli pöördeid lugedes leiate Maa sisikonnast kivisütt või maaki. See on tingitud asjaolust, et selliste fossiilide tihedus ja mass on suurem kui nende aluseks olevad lahtised kivimid.

Matemaatilist pendlit kasutasid sellised silmapaistvad teadlased nagu Sokrates, Aristoteles, Platon, Plutarchos, Archimedes. Paljud neist uskusid, et see mehaaniline süsteem võib mõjutada inimese saatust ja elu. Archimedes kasutas oma arvutustes matemaatilist pendlit. Tänapäeval kasutavad paljud okultistid ja selgeltnägijad seda mehaanilist süsteemi oma ennustuste täitmiseks või kadunud inimeste otsimiseks.
Ka kuulus prantsuse astronoom ja loodusteadlane C. Flammarion kasutas oma uurimistöös matemaatilist pendlit. Ta väitis, et suutis tema abiga ennustada uue planeedi avastamist, Tunguska meteoriidi ilmumist ja muid olulisi sündmusi. Teise maailmasõja ajal töötas Saksamaal (Berliinis) spetsialiseerunud pendliinstituut. Tänapäeval tegeleb samalaadse uurimistööga Müncheni parapsühholoogia instituut. Selle asutuse töötajad nimetavad oma tööd pendliga "radiesteesiaks".
Matemaatiline pendel- see on materiaalne punkt, mis ripub kaalutu ja venimatu niidi küljes, mis asub Maa gravitatsiooniväljas. Matemaatiline pendel on idealiseeritud mudel, mis kirjeldab reaalset pendlit õigesti ainult teatud tingimustel. Tõelist pendlit võib pidada matemaatiliseks, kui niidi pikkus on palju suurem kui sellele riputatud keha mõõtmed, niidi mass on keha massiga võrreldes tühine ja keerme deformatsioonid on nii väikesed. et need võib üldse tähelepanuta jätta.
Võnkesüsteemi moodustavad sel juhul niit, selle külge kinnitatud keha ja Maa, ilma milleta see süsteem ei saaks pendlina toimida.
kus a X – kiirendus, g - raskuskiirendus, X- nihe, l on pendelnööri pikkus.
Seda võrrandit nimetatakse matemaatilise pendli vabavõnkumiste võrrand. See kirjeldab õigesti vaadeldavaid võnkumisi ainult siis, kui on täidetud järgmised eeldused:
2) arvestatakse vaid väikese pöördenurgaga pendli väikseid võnkeid.
Kõigi süsteemide vaba vibratsiooni kirjeldatakse kõigil juhtudel sarnaste võrranditega.
Matemaatilise pendli vabavõnkumiste põhjused on järgmised:
1. Tõmbejõu ja raskusjõu mõju pendlile, mis takistab pendli nihkumist tasakaaluasendist ja sunnib seda uuesti kukkuma.
2. Pendli inerts, mille tõttu kiirust säilitades ei peatu ta tasakaaluasendis, vaid läbib seda edasi.
Matemaatilise pendli vabavõnkumiste periood
Matemaatilise pendli vabavõnkumiste periood ei sõltu selle massist, vaid selle määrab ainult keerme pikkus ja vabalangemise kiirendus pendli asukohas.
Energia muundamine harmooniliste vibratsioonide ajal
Vedrupendli harmooniliste võnkumiste korral muudetakse elastselt deformeerunud keha potentsiaalne energia selle kineetiliseks energiaks, kus k – elastsuse koefitsient, X - pendli nihkemoodul tasakaaluasendist, m- pendli mass, v- tema kiirus. Vastavalt harmooniliste võnkumiste võrrandile:
![]() ,
,
![]() .
.
Vedrupendli koguenergia:
![]() .
.
Matemaatilise pendli koguenergia:
![]()
Matemaatilise pendli puhul
Energia muundumine vedrupendli võnkumisel toimub vastavalt mehaanilise energia jäävuse seadusele ( ![]() ). Kui pendel liigub tasakaaluasendist üles või alla, suureneb selle potentsiaalne energia ja väheneb kineetiline energia. Kui pendel läbib tasakaaluasendi ( X= 0), tema potentsiaalne energia on võrdne nulliga ja pendli kineetilisel energial on suurim väärtus, mis on võrdne koguenergiaga.
). Kui pendel liigub tasakaaluasendist üles või alla, suureneb selle potentsiaalne energia ja väheneb kineetiline energia. Kui pendel läbib tasakaaluasendi ( X= 0), tema potentsiaalne energia on võrdne nulliga ja pendli kineetilisel energial on suurim väärtus, mis on võrdne koguenergiaga.
Seega muundub pendli potentsiaalne energia kineetiliseks, kineetiline potentsiaaliks, potentsiaalne siis taas kineetiliseks jne pendli vabavõnkumise käigus. Kogu mehaaniline energia jääb aga muutumatuks.
Sunnitud vibratsioonid. Resonants.
Võnkumisi, mis tekivad välise perioodilise jõu mõjul, nimetatakse sunnitud vibratsioonid. Väline perioodiline jõud, mida nimetatakse liikumapanevaks jõuks, annab võnkesüsteemile lisaenergiat, mida kasutatakse hõõrdumisest tingitud energiakadude täiendamiseks. Kui liikumapanev jõud muutub ajas vastavalt siinus- või koosinusseadusele, siis on sundvõnkumised harmoonilised ja summutamata.
Erinevalt vabavõnkumisest, kui süsteem saab energiat ainult üks kord (kui süsteem on tasakaalust välja viidud), neelab sundvõnkumiste korral süsteem seda energiat pidevalt välise perioodilise jõu allikast. See energia kompenseerib hõõrdumise ületamiseks kulutatud kaod ja seetõttu jääb võnkesüsteemi no summaarne energia muutumatuks.
Sundvõnkumiste sagedus on võrdne edasiviiva jõu sagedusega. Kui edasiviiva jõu sagedus υ langeb kokku võnkesüsteemi loomuliku sagedusega υ 0 , sundvõnkumiste amplituudi järsk tõus - resonants. Resonants tekib seetõttu υ = υ 0 vabade vibratsioonidega ajas toimiv välisjõud on alati koos võnkuva keha kiirusega suunatud ja teeb positiivset tööd: võnkuva keha energia suureneb, võnkumiste amplituud muutub suureks. Sundvõnkumiste amplituudi sõltuvuse graafik AGA t edasiviiva jõu sageduse kohta υ joonisel näidatud graafikut nimetatakse resonantskõveraks:

Resonantsi nähtus mängib olulist rolli paljudes loodus-, teadus- ja tööstusprotsessides. Näiteks sildade, hoonete ja muude koormuse all vibratsiooni tekitavate konstruktsioonide projekteerimisel on vaja arvestada resonantsi nähtusega, vastasel juhul võivad need konstruktsioonid teatud tingimustel hävida.
Joonisel fig. 2, on erineva kuju ja suurusega pikendatud korpused, mis võnguvad ümber vedrustuse või tugipunkti. Selliseid süsteeme nimetatakse füüsilisteks pendliteks. Tasakaaluseisundis, kui raskuskese on vertikaalsel vedrustuspunktist (või tugipunktist) allpool, tasakaalustatakse raskusjõud (deformeerunud pendli elastsusjõudude kaudu) toe reaktsiooniga. Tasakaaluasendist kõrvalekaldumisel määravad gravitatsiooni- ja elastsusjõud igal ajahetkel pendli nurkkiirenduse, st määravad pendli liikumise (võnkumise) olemuse. Vaatleme nüüd võnkumiste dünaamikat üksikasjalikumalt, kasutades lihtsaimat näidet nn matemaatilisest pendlist, mis kujutab endast pikale õhukesele niidile riputatud väikest raskust.
Matemaatilise pendli puhul võime jätta tähelepanuta keerme massi ja raskuse deformatsiooni, st eeldada, et pendli mass on koondunud raskusesse ja elastsusjõud on koondunud keermesse, mida arvestatakse. pikendamatu. Vaatame nüüd, milliste jõudude mõjul meie pendel võngub pärast seda, kui see on mingil viisil (tõuke, kõrvalekalde) tasakaalust välja viidud.
Kui pendel on tasakaaluasendis, tasakaalustab selle raskusele mõjuv ja vertikaalselt allapoole suunatud gravitatsioonijõud keerme pingega. Paindunud asendis (joonis 15) mõjub gravitatsioon piki keerme suunatud tõmbejõu suhtes nurga all. Jagame gravitatsioonijõu kaheks komponendiks: keerme suunas () ja sellega risti (). Pendli võnkumisel ületab keerme tõmbejõud veidi komponenti - tsentripetaaljõu väärtuse võrra, mis põhjustab koormuse kaarekujulise liikumise. Komponent on alati suunatud tasakaaluasendi poole; tundub, et ta püüab seda positsiooni taastada. Seetõttu nimetatakse seda sageli taastavaks jõuks. Moodul on seda suurem, mida suurem on pendli kõrvalekaldumine.

Riis. 15. Taastav jõud pendli tasakaaluasendist kõrvalekaldumisel
Nii et niipea, kui pendel hakkab oma võnkumiste ajal tasakaaluasendist kõrvale kalduma, näiteks paremale, ilmub jõud, mis aeglustab selle liikumist, mida rohkem, mida kaugemale see kõrvale kaldub. Lõppkokkuvõttes peatab see jõud ta ja tõmbab ta tagasi tasakaaluasendisse. Kuid sellele positsioonile lähenedes jääb jõud järjest väiksemaks ja tasakaaluasendis ise pöördub nulli. Seega läbib pendel tasakaaluasendit inertsi abil. Niipea, kui see hakkab vasakule kalduma, ilmub jälle jõud, mis kasvab koos kõrvalekalde suurenemisega, kuid on nüüd suunatud paremale. Vasakpoolne liikumine aeglustub uuesti, siis pendel peatub hetkeks, misjärel algab kiirendatud liikumine paremale jne.
Mis juhtub pendli energiaga, kui see kõikub?
Perioodi jooksul kaks korda - suurimate kõrvalekallete korral vasakule ja paremale - pendel peatub, see tähendab, et nendel hetkedel on kiirus null, mis tähendab, et ka kineetiline energia on null. Aga just nendel hetkedel tõstetakse pendli raskuskese suurimale kõrgusele ja järelikult on ka potentsiaalne energia suurim. Vastupidi, tasakaaluasendi läbimise hetkedel on potentsiaalne energia väikseim ning kiirus ja kineetiline energia saavutavad maksimaalse väärtuse.
Eeldame, et pendli hõõrdejõude õhule ja hõõrdumist vedrustuspunktis võib tähelepanuta jätta. Siis vastavalt energia jäävuse seadusele on see maksimaalne kineetiline energia täpselt võrdne potentsiaalse energia ülemääraga asendis, kus on suurim kõrvalekalle potentsiaalsest energiast tasakaaluasendis.
Niisiis, kui pendel võngub, toimub kineetilise energia perioodiline üleminek potentsiaalseks energiaks ja vastupidi ning selle protsessi periood on poole pikem kui pendli enda võnkeperiood. Pendli koguenergia (potentsiaalsete ja kineetilise energia summa) on aga kogu aeg konstantne. See on võrdne energiaga, mis pendlile käivitamisel anti, olgu see siis potentsiaalse energia (esialgne läbipaine) või kineetilise energia (esialgne tõuge) kujul.
See kehtib kõigi vibratsioonide puhul, kui puudub hõõrdumine või muud protsessid, mis võtavad energiat võnkesüsteemist või annavad sellele energiat. Seetõttu jääb amplituud muutumatuks ja selle määrab alghälve või tõukejõud.
Samad muutused taastavas jõus ja samasuguse energia ülemineku saame siis, kui palli niidile riputamise asemel paneme kerakujulises topsis või ümbermõõdu ümber kõverdatud süvendis veerema vertikaaltasandil. Sel juhul võtab keerme pinge rolli tassi või küna seinte rõhk (jällegi jätame tähelepanuta kuuli hõõrdumise seinte ja õhu vastu).
Matemaatiline pendel on tavalise pendli mudel. Matemaatiline pendel on materiaalne punkt, mis ripub pika kaaluta ja venimatu keerme küljes.
Viige pall tasakaalust välja ja vabastage see. Pallile mõjub kaks jõudu: gravitatsioon ja pinge nööris. Kui pendel liigub, mõjub sellele ikkagi õhuhõõrdejõud. Kuid me peame seda väga väikeseks.
Jagame gravitatsioonijõu kaheks komponendiks: piki niiti suunatud jõud ja jõud, mis on suunatud kuuli trajektoori puutujaga risti.
Need kaks jõudu annavad kokku gravitatsiooni. Keerme elastsusjõud ja gravitatsioonikomponent Fn annavad kuulile tsentripetaalse kiirenduse. Nende jõudude töö on võrdne nulliga ja seetõttu muudavad nad ainult kiirusvektori suunda. Igal ajahetkel puutub see ringi kaarega kokku.
Gravitatsioonikomponendi Fτ toimel liigub pall mööda ringjoont absoluutväärtuses suureneva kiirusega. Selle jõu väärtus muutub alati absoluutväärtuses, tasakaaluasendit läbides võrdub see nulliga.
Võnkuva liikumise dünaamika
Elastsusjõu mõjul võnkuva keha liikumisvõrrand.
Liikumise üldvõrrand:
Süsteemis tekivad võnkumised elastsusjõu mõjul, mis Hooke'i seaduse kohaselt on otseselt võrdeline koormuse nihkega.
Siis saab palli liikumisvõrrand järgmise kuju:
Jagades selle võrrandi m-ga, saame järgmise valemi:
Ja kuna mass ja elastsuskoefitsient on konstantsed väärtused, on ka suhe (-k / m) konstantne. Oleme saanud võrrandi, mis kirjeldab keha vibratsioone elastsusjõu mõjul.
Keha kiirenduse projektsioon on otseselt võrdeline selle koordinaadiga, mis on võetud vastupidise märgiga.
Matemaatilise pendli liikumisvõrrand
Matemaatilise pendli liikumisvõrrandit kirjeldatakse järgmise valemiga:
Sellel võrrandil on sama kuju kui koormuse liikumise võrrandil vedrul. Järelikult toimuvad pendli võnkumised ja kuuli liikumine vedrul ühtemoodi.
Kuuli nihkumine vedrul ja pendli keha nihkumine tasakaaluasendist muutuvad ajas samade seaduste järgi.
 Ege füüsikatulemustes
Ege füüsikatulemustes Kuidas kandideerida eelmiste aastate lõpetajate eksamile
Kuidas kandideerida eelmiste aastate lõpetajate eksamile Millised on võimalused eelarvesse pääseda: punktide arvu, ülikooli, eriala järgi
Millised on võimalused eelarvesse pääseda: punktide arvu, ülikooli, eriala järgi