Maatriksnormid. Normide järjepidevus ja alluvus
» Õppetund 12. Maatriksi auaste. Maatriksi järgu arvutamine. Maatriksi norm
Õppetund number 12. Maatriksi auaste. Maatriksi järgu arvutamine. Maatriksi norm.
Kui kõik maatriksi alaealisedAtellidakon võrdsed nulliga, siis kõik k + 1 järgu minoorsed, kui sellised on olemas, on samuti võrdsed nulliga.
Maatriksi auaste A
on maatriksi alaealiste suurim järjekord A
, muud kui null.
Maksimaalne järjestus võib olla võrdne maatriksi ridade või veergude arvu minimaalse arvuga, s.t. kui maatriksi suurus on 4x5, siis on maksimaalne auaste 4.
Maatriksi minimaalne auaste on 1, välja arvatud juhul, kui tegemist on nullmaatriksiga, kus auaste on alati null.
Järkjärgu n mittedegenereerunud ruutmaatriksi auaste võrdub n-ga, kuna selle determinant on järgu n moll ja mittedegenereerunud maatriks on nullist erinev.
Maatriksi transponeerimine ei muuda selle järjestust.
Olgu maatriksi auaste . Seejärel kutsutakse välja mis tahes järgu molli , välja arvatud null põhimoll.
Näide. Antud maatriks A. 
Maatriksi determinant on null.
Teise järgu alaealine ![]() . Seetõttu r(A)=2 ja moll on põhiline.
. Seetõttu r(A)=2 ja moll on põhiline.
Põhiline alaealine on ka alaealine ![]() .
.
Alaealine ![]() , sest =0, seega pole see põhiline.
, sest =0, seega pole see põhiline.
Harjutus: kontrollige iseseisvalt, millised teised teist järku alaealised on põhilised ja millised mitte.
Maatriksi auastme leidmine kõigi selle alaealiste arvutamise teel nõuab liiga palju arvutustööd. (Lugeja saab kontrollida, et neljandat järku ruutmaatriksis on 36 teist järku alaealist.) Seetõttu kasutatakse auastme leidmiseks teistsugust algoritmi. Selle kirjeldamiseks on vaja täiendavat teavet.
Nimetame nendega järgmisi tehteid maatriksite elementaarseteks teisendusteks:
1) ridade või veergude permutatsioon;
2) rea või veeru korrutamine nullist erineva arvuga;
3) ühele reale teise rea lisamine, korrutatuna arvuga, või teise veeru ühele veerule liitmine, korrutatuna arvuga.
Elementaarteisenduste korral maatriksi auaste ei muutu.
Algoritm maatriksi järgu arvutamiseks sarnaneb determinantarvutusalgoritmiga ja seisneb selles, et elementaarteisenduste abil taandatakse maatriks lihtsaks vormiks, mille jaoks pole auastet keeruline leida. Kuna auaste iga teisendusega ei muutunud, leiame teisendatud maatriksi auastme arvutamisel algse maatriksi auastme.
Olgu nõutav mõõtmete maatriksi auaste arvutamine mxn.
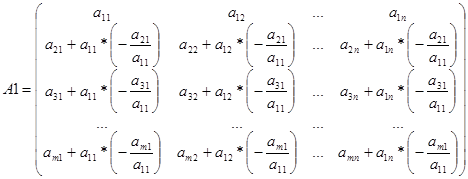
Arvutuste tulemusena on maatriks A1 kujul 

Kui kõik read, alates kolmandast, on nullid, siis ![]() , alaealisest alates
, alaealisest alates ![]() . Vastasel juhul, muutes ridu ja veerge, mille numbrid on suuremad kui kaks, saavutame selle, et kolmanda rea kolmas element erineb nullist. Edasi, lisades suurte arvudega ridadele kolmanda rea, mis on korrutatud vastavate arvudega, saame kolmandasse veergu nullid, alates neljandast elemendist jne.
. Vastasel juhul, muutes ridu ja veerge, mille numbrid on suuremad kui kaks, saavutame selle, et kolmanda rea kolmas element erineb nullist. Edasi, lisades suurte arvudega ridadele kolmanda rea, mis on korrutatud vastavate arvudega, saame kolmandasse veergu nullid, alates neljandast elemendist jne.
Mingil etapil jõuame maatriksini, milles kõik read, mis algavad (r + 1) th-st, on võrdsed nulliga (või puuduvad punktis ) ning esimestes ridades ja esimestes veergudes olev moll on kolmnurga determinant maatriks nullist erineva elementidega diagonaalil . Sellise maatriksi auaste on. Seetõttu on Rang(A)=r.
Maatriksi järgu leidmiseks pakutud algoritmis tuleb kõik arvutused teha ilma ümardamiseta. Suvaliselt väike muutus vähemalt ühes vahemaatriksi elemendis võib viia selleni, et saadud vastus erineb mitme ühiku võrra algse maatriksi auastmest.
Kui algse maatriksi elemendid olid täisarvud, siis on mugav teha arvutusi ilma murde kasutamata. Seetõttu on igas etapis soovitatav korrutada stringid selliste arvudega, et arvutustes ei tekiks murde.
Laboratoorses ja praktilises töös käsitleme maatriksi auastme leidmise näidet.
ALGORITMI LEIDMINE MAATRIKS REEGLID
.
Maatriksi norme on ainult kolm.
Esimene maatriksinorm= iga veeru kõigi elementide liitmisel saadud arvude maksimum, võttes arvesse moodulit.
Näide: olgu antud 3x2 maatriks A (joonis 10). Esimene veerg sisaldab elemente: 8, 3, 8. Kõik elemendid on positiivsed. Leiame nende summa: 8+3+8=19. Teine veerg sisaldab elemente: 8, -2, -8. Kaks elementi on negatiivsed, seetõttu on nende arvude lisamisel vaja asendada nende arvude moodul (st ilma miinusmärkideta). Leiame nende summa: 8+2+8=18. Nende kahe arvu maksimum on 19. Seega on maatriksi esimene norm 19.

Joonis 10.
Teine maatriksi norm on ruutjuur maatriksi kõigi elementide ruutude summast. Ja see tähendab, et ruudustame kõik maatriksi elemendid, seejärel lisame saadud väärtused ja eraldame tulemusest ruutjuure.
Meie puhul osutus maatriksi 2 norm võrdseks ruutjuurega 269. Diagrammil võtsin umbkaudu ruutjuure 269 ja tulemuseks oli ligikaudu 16,401. Kuigi õigem on juurt mitte välja tõmmata. 
Kolmanda normi maatriks on iga rea kõigi elementide liitmisel saadud arvude maksimum, võttes arvesse moodulit.
Meie näites: esimene rida sisaldab elemente: 8, 8. Kõik elemendid on positiivsed. Leiame nende summa: 8+8=16. Teine rida sisaldab elemente: 3, -2. Üks elementidest on negatiivne, seega tuleb nende arvude lisamisel asendada selle arvu moodul. Leiame nende summa: 3+2=5. Kolmas rida sisaldab elemente 8 ja -8. Üks elementidest on negatiivne, seega tuleb nende arvude lisamisel asendada selle arvu moodul. Leiame nende summa: 8+8=16. Nende kolme arvu maksimum on 16. Seega on maatriksi kolmas norm 16. 
Koostanud: Saliy N.A.
Maatriksi norm kutsume sellele maatriksile määratud reaalarvu ||A|| nii, et see reaalarvuna omistatakse igale maatriksile n-mõõtmelisest ruumist ja rahuldab 4 aksioomi:
1. ||A||³0 ja ||A||=0 ainult siis, kui A on nullmaatriks;
2. ||αA||=|α|·||A||, kus a R;
3. ||A+B||£||A||+||B||;
4. ||A·B||£||A||·||B||. (korrutise omadus)
Maatriksnormi saab sisestada mitmel viisil. Maatriksit A võib vaadelda kui n 2 - mõõtmete vektor.
Seda normi nimetatakse maatriksi eukleidiliseks normiks.
Kui suvalise ruutmaatriksi A ja vektori x puhul, mille mõõde on võrdne maatriksi järguga, on ebavõrdsus ||Ax||£||A||·||x||
siis ütleme, et maatriksi A norm on kooskõlas vektori normiga. Pange tähele, et vektori norm on viimases tingimuses vasakul (Ax on vektor).
Erinevad maatriksnormid on kooskõlas antud vektori normiga. Valime nende hulgast välja väikseima. Selline saab olema
See maatriksnorm allub antud vektorinormile. Maksimumi olemasolu selles avaldises tuleneb normi järjepidevusest, kuna alati on olemas vektor x -> ||x||=1 ja ||Ax||=||A||.
Näitame, et xsiis norm N(A) ei allu ühelegi vektorinormile. Eelnevalt kasutusele võetud vektornormidele alluvad maatriksnormid väljendatakse järgmiselt:
1. ||A|| ¥ = |a ij | (norm-maksimum)
2. ||A|| 1 = |a ij | (norm-summa)
3. ||A|| 2 = , (spektri norm)
kus s 1 on sümmeetrilise maatriksi A¢A suurim omaväärtus, mis on transponeeritud ja algmaatriksite korrutis. Kui maatriks A¢A on sümmeetriline, siis on kõik selle omaväärtused reaalsed ja positiivsed. Arv l on omaväärtus ja nullist erinev vektor x on maatriksi A omavektor (kui need on seotud suhtega Ax=lx). Kui maatriks A on ise sümmeetriline, A¢ = A, siis A¢A = A 2 ja siis s 1 = , kus on suurima absoluutväärtusega maatriksi A omaväärtus, seega on antud juhul = .
Maatriksi omaväärtused ei ületa ühtegi selle kokkulepitud normi. Normaliseerides omaväärtusi defineeriva seose, saame ||λx||=||Ax||, |λ|·||x||=||Ax||£||||·||x||, | λ| £||A||
Alates ||A|| 2 £||A|| e , kus Eukleidise normi saab arvutada lihtsalt, spektraalnormi asemel saab hinnangutes kasutada maatriksi eukleidilist normi.
30. Võrrandisüsteemide tinglikkus. Konditsioneeriv tegur .
Tingimuslikkuse aste- otsuse mõju algandmetele. kirves = b: vektor b vastab otsusele x. Lase b muutub . Siis vektor b+ sobib uue lahendusega x+ : A(x+ ) = b+. Kuna süsteem on lineaarne, siis Kirves+A = b+, siis A = ; = ; = ; b = Ax; = siis ; * , kus on lahenduse häiringu suhteline viga, – konditsioneerimisfaktortingimus(A) (mitu korda võib lahenduse viga suureneda), on vektori suhteline häiritus b. tingimus(A) = ; tingimus(A)* Koefitsiendi omadused: sõltub maatriksi normi valikust; cond( = kond(A); maatriksi korrutamine arvuga ei mõjuta tingimustegurit. Mida suurem on koefitsient, seda tugevamini mõjutab algandmete viga SLAE lahendust. Tingimuse number ei tohi olla väiksem kui 1.
31. Sweep meetod lineaarsete algebraliste võrrandite süsteemide lahendamiseks.
Sageli tekib vajadus lahendada süsteeme, mille maatriksid, olles nõrgalt täidetud, s.t. sisaldab palju nullist erinevat elementi. Selliste süsteemide maatriksid on tavaliselt kindla struktuuriga, mille hulgas on süsteeme ribastruktuuri maatriksitega, s.t. neis asuvad nullist erinevad elemendid põhidiagonaalil ja mitmel sekundaarsel diagonaalil. Ribamaatriksitega süsteemide lahendamiseks saab Gaussi meetodi teisendada tõhusamateks meetoditeks. Vaatleme lindisüsteemide lihtsaimat juhtumit, millele, nagu hiljem näeme, on diferentsiaalvõrrandite piirväärtusülesannete diskreteerimisülesannete lahendamine taandatud lõplike erinevuste, lõplike elementide jne meetoditega. Kolme diagonaalmaatriks on selline maatriks, millel on nullist erinevad elemendid ainult põhidiagonaalis ja selle kõrval:
Nullist erineva elemendi kolme diagonaali maatriksil on kokku (3n-2).
Nimeta maatriksi koefitsiendid ümber:
Seejärel võib süsteemi komponentide kaupa esitada järgmiselt:
A i * x i-1 + b i * x i + c i * x i+1 = d i , i = 1, 2,…, n; (7)
a 1 = 0, c n = 0. (kaheksa)
Süsteemi struktuur eeldab seost ainult naabertundmatute vahel:
x i \u003d x i * x i +1 + h i (9)
x i -1 =x i -1* x i + h i -1 ja asendage (7):
A i (x i-1* x i + h i-1)+ b i * x i + c i * x i+1 = d i
(a i * x i-1 + b i)x i = –c i * x i+1 +d i –a i * h i-1
Võrreldes saadud avaldist esitusega (7), saame:
Valemid (10) esindavad rekursiivseid seoseid pühkimiskoefitsientide arvutamiseks. Need nõuavad algväärtuste täpsustamist. Vastavalt esimesele tingimusele (8) i =1 puhul on meil 1 =0, mis tähendab
Lisaks arvutatakse ja salvestatakse ülejäänud pühkimiskoefitsiendid valemite (10) järgi, kui i=2,3,…, n ja i=n korral, võttes arvesse teist tingimust (8), saame x n =0 . Seetõttu vastavalt valemile (9) x n = h n .
Seejärel leitakse valemi (9) järgi järjestikku tundmatud x n -1 , x n -2 , …, x 1. Seda arvutusetappi nimetatakse pöördkäiguks, samal ajal kui pühkimiskoefitsientide arvutamist nimetatakse edasisuunamiseks.
Pühkimismeetodi edukaks rakendamiseks on vajalik, et arvutuste käigus ei tekiks nulliga jagamise olukordi ja süsteemide suure mõõtmelisuse korral ei tohiks ümardusvigade arv kiiresti suureneda. Kutsume jooksu õige, kui pühkimiskoefitsientide (10) nimetaja ei kao ja jätkusuutlik, kui ½x i ½<1 при всех i=1,2,…, n. Достаточные условия корректности и устойчивости прогонки, которые во многих приложениях выполняются, определяются теоремой.
Teoreem. Olgu võrrandi (7) koefitsiendid a i ja c i, kui i=2,3,..., n-1 erinevad nullist ja olgu
½b i ½>½a i ½+½c i ½ i=1, 2,..., n korral. (üksteist)
Siis on valemitega (10), (9) defineeritud pühkimine õige ja stabiilne.
Entsüklopeediline YouTube
1 / 1
✪ Vektornorm. 4. osa
Subtiitrid
Definitsioon
Olgu K põhiväli (tavaliselt K = R või K = C ) ja on kõigi m rea ja n veeruga maatriksite lineaarruum, mis koosnevad K elementidest. Maatriksiruumile antakse norm, kui iga maatriks on seotud mittenegatiivse reaalarvuga ‖ A ‖ (\displaystyle \|A\|), nimetatakse selle normiks, nii et
Ruutmaatriksite puhul (st. m = n), maatrikseid saab korrutada ruumist lahkumata ja seetõttu rahuldavad nendes ruumides olevad normid tavaliselt ka omadust submultiplikatiivsus :
Submultiplikatiivsust saab teostada ka mitteruutmaatriksite normide jaoks, kuid defineerida mitme nõutava suuruse jaoks korraga. Nimelt kui A on maatriks ℓ × m, ja B on maatriks m × n, siis A B- maatriks ℓ × n .
Operaatori normid
Oluline maatriksnormide klass on operaatori normid, mida nimetatakse ka alluvad või indutseeritud . Operaatori norm on unikaalselt konstrueeritud vastavalt kahele normile, mis on määratletud punktides ja , tuginedes asjaolule, et mis tahes maatriks m × n on esindatud lineaaroperaatoriga K n (\displaystyle K^(n)) sisse K m (\displaystyle K^(m)). Täpsemalt
‖ A ‖ = sup ( ‖ A x ‖ : x ∈ K n , ‖ x ‖ = 1 ) = sup ( ‖ A x ‖ ‖ x ‖ : x ∈ K n , x ≠ 0 ) . (\displaystyle (\begin(joondatud)\|A\|&=\sup\(\|Ax\|:x\in K^(n),\ \|x\|=1\)\\&=\ sup \left\((\frac (\|Ax\|)(\|x\|)):x\in K^(n),\ x\neq 0\right\).\end(joondatud)))Tingimusel, et vektoriruumide normid on järjepidevalt täpsustatud, on selline norm alamkorrutis (vt ).
Näited operaatori normidest
Spektrinormi omadused:
- Operaatori spektraalnorm on võrdne selle operaatori maksimaalse ainsuse väärtusega.
- Normaaloperaatori spektraalnorm on võrdne selle operaatori maksimaalse mooduli omaväärtuse absoluutväärtusega.
- Spektri norm ei muutu, kui maatriksit korrutatakse ortogonaalse (ühtse) maatriksiga.
Maatriksite mitteoperaatori normid
On maatriksnorme, mis ei ole operaatori normid. Maatriksite mitteoperaatornormide kontseptsiooni tutvustas Yu. I. Lyubich ja uuris G. R. Belitsky.
Näide mitteoperaatori normist
Näiteks võtke arvesse kahte erinevat operaatori normi ‖ A ‖ 1 (\displaystyle \|A\|_(1)) ja ‖ A ‖ 2 (\displaystyle \|A\|_(2)), näiteks rea- ja veerunormid. Uue normi moodustamine ‖ A ‖ = m a x (‖ A ‖ 1, ‖ A ‖ 2) (\displaystyle \|A\|=max(\|A\|_(1),\|A\|_(2))). Uuel normil on rõngakujuline kinnistu ‖ A B ‖ ≤ ‖ A ‖ ‖ B ‖ (\displaystyle \|AB\|\leq \|A\|\|B\|), säilitab üksuse ‖ I ‖ = 1 (\displaystyle \|I\|=1) ja ei ole operaator .
Näited normidest
Vektor p (\displaystyle p)- norm
Võib kaaluda m × n (\displaystyle m\times n) maatriks suurusvektorina m n (\displaystyle mn) ja kasutage standardseid vektornorme:
‖ A ‖ p = ‖ v e c (A) ‖ p = (∑ i = 1 m ∑ j = 1 n | a i j | p) 1 / p (\kuvastiil \|A\|_(p)=\|\mathrm ( vec) (A)\|_(p)=\left(\sum _(i=1)^(m)\sum _(j=1)^(n)|a_(ij)|^(p)\ paremal)^(1/p))Frobeniuse norm
Frobeniuse norm, või eukleidiline norm on p-normi erijuht lk = 2 : ‖ A ‖ F = ∑ i = 1 m ∑ j = 1 n a i j 2 (\displaystyle \|A\|_(F)=(\sqrt (\sum _(i=1)^(m)\sum _(j =1)^(n)a_(ij)^(2)))).
Frobeniuse normi on lihtne arvutada (võrreldes näiteks spektraalnormiga). Sellel on järgmised omadused:
‖ A x ‖ 2 2 = ∑ i = 1 m | ∑ j = 1 n a i j x j | 2 ≤ ∑ i = 1 m (∑ j = 1 n | a i j | 2 ∑ j = 1 n | x j | 2) = ∑ j = 1 n | x j | 2 ‖ A ‖ F 2 = ‖ A ‖ F 2 ‖ x ‖ 2 2 . (\displaystyle \|Ax\|_(2)^(2)=\sum _(i=1)^(m)\left|\sum _(j=1)^(n)a_(ij)x_( j)\right|^(2)\leq \sum _(i=1)^(m)\left(\sum _(j=1)^(n)|a_(ij)|^(2)\sum _(j=1)^(n)|x_(j)|^(2)\parem)=\summa _(j=1)^(n)|x_(j)|^(2)\|A\ |_(F)^(2)=\|A\|_(F)^(2)\|x\|_(2)^(2).)- Submultiplikatiivsus: ‖ A B ‖ F ≤ ‖ A ‖ F ‖ B ‖ F (\displaystyle \|AB\|_(F)\leq \|A\|_(F)\|B\|_(F)), sest ‖ A B ‖ F 2 = ∑ i , j | ∑ k a i k b k j | 2 ≤ ∑ i , j (∑ k | a i k | | b k j |) 2 ≤ ∑ i , j (∑ k | a i k | 2 ∑ k | b k j | 2) = ∑ i , k | a i k | 2 ∑ k , j | b k j | 2 = ‖ A ‖ F 2 ‖ B ‖ F 2 (\displaystyle \|AB\|_(F)^(2)=\sum _(i,j)\left|\sum _(k)a_(ik) b_(kj)\right|^(2)\leq \sum _(i,j)\left(\sum _(k)|a_(ik)||b_(kj)|\right)^(2)\ leq \sum _(i,j)\left(\sum _(k)|a_(ik)|^(2)\sum _(k)|b_(kj)|^(2)\right)=\sum _(i,k)|a_(ik)|^(2)\summa _(k,j)|b_(kj)|^(2)=\|A\|_(F)^(2)\| B\|_(F)^(2)).
- ‖ A ‖ F 2 = t r A ∗ A = t r A A ∗ (\displaystyle \|A\|_(F)^(2)=\mathop (\rm (tr)) A^(*)A=\ mathop (\rm (tr)) AA^(*)), kus t r A (\displaystyle \mathop (\rm (tr)) A)- maatriksi jälg A (\displaystyle A), A ∗ (\displaystyle A^(*)) on hermiidi konjugaat maatriks .
- ‖ A ‖ F 2 = ρ 1 2 + ρ 2 2 + ⋯ + ρ n 2 (\displaystyle \|A\|_(F)^(2)=\rho _(1)^(2)+\rho _ (2)^(2)+\punktid +\rho _(n)^(2)), kus ρ 1 , ρ 2 , … , ρ n (\displaystyle \rho _(1),\rho _(2),\dots,\rho _(n))- maatriksi ainsuse väärtused A (\displaystyle A).
- ‖ A ‖ F (\displaystyle \|A\|_(F)) ei muutu maatriksi korrutamisel A (\displaystyle A) vasakule või paremale ortogonaalsetele (ühtnetele) maatriksitele.
Mooduli maksimum
Maksimaalne mooduli norm on teine p-normi erijuhtum lk = ∞ .
‖ A ‖ max = max ( | a i j | ) . (\displaystyle \|A\|_(\text(max))=\max\(|a_(ij)|\).)Norm Shatten
Maatriksi ja vektori normide kooskõla
Maatriksi norm ‖ ⋅ ‖ a b (\displaystyle \|\cdot \|_(ab)) peal K m × n (\displaystyle K^(m\times n)) helistas nõus normidega ‖ ⋅ ‖ a (\displaystyle \|\cdot \|_(a)) peal K n (\displaystyle K^(n)) ja ‖ ⋅ ‖ b (\displaystyle \|\cdot \|_(b)) peal K m (\displaystyle K^(m)), kui:
‖ A x ‖ b ≤ ‖ A ‖ a b ‖ x ‖ a (\displaystyle \|Ax\|_(b)\leq \|A\|_(ab)\|x\|_(a))iga A ∈ K m × n , x ∈ K n (\displaystyle A\in K^(m\times n),x\in K^(n)). Ehituse järgi on operaatori norm kooskõlas algse vektori normiga.
Näited järjekindlatest, kuid mitte allutatud maatriksnormidest:
Normide samaväärsus
Kõik normid ruumis K m × n (\displaystyle K^(m\times n)) on samaväärsed, st mis tahes kahe normi jaoks ‖ . α (\displaystyle \|.\|_(\alpha )) ja ‖ . ‖ β (\displaystyle \|.\|_(\beta )) ja mis tahes maatriksi jaoks A ∈ K m × n (\displaystyle A\in K^ (m\ korda n)) topelt ebavõrdsus on tõsi.
 Pedagoogikaülikooli üliõpilane: elu ja ametialased väljavaated: Monograafia Noore õpetaja kutsetegevus
Pedagoogikaülikooli üliõpilane: elu ja ametialased väljavaated: Monograafia Noore õpetaja kutsetegevus Kompetentsipõhise hariduse tunnused Tunniks valmistumine
Kompetentsipõhise hariduse tunnused Tunniks valmistumine Psühholoogilised ja pedagoogilised lähenemised kompetentsipõhise hariduse tulemuste hindamisel III
Psühholoogilised ja pedagoogilised lähenemised kompetentsipõhise hariduse tulemuste hindamisel III