Vị trí cân bằng của con lắc lò xo. Dao động của con lắc lò xo
Con lắc lò xo là chất điểm khối lượng, gắn vào lò xo không trọng lượng đàn hồi tuyệt đối có độ cứng  . Có hai trường hợp đơn giản nhất: nằm ngang (Hình 15, một) và dọc (Hình 15, b) con lắc.
. Có hai trường hợp đơn giản nhất: nằm ngang (Hình 15, một) và dọc (Hình 15, b) con lắc.
một)
Con lắc nằm ngang(Hình 15a). Khi chuyển hàng hóa  mất cân bằng
mất cân bằng  bằng số tiền
bằng số tiền  tác dụng lên nó theo phương ngang. trở về lực đàn hồi
tác dụng lên nó theo phương ngang. trở về lực đàn hồi
 (Định luật Hooke).
(Định luật Hooke).
Giả định rằng giá đỡ ngang mà tải trượt  trong quá trình dao động của nó, nó hoàn toàn êm ái (không có ma sát).
trong quá trình dao động của nó, nó hoàn toàn êm ái (không có ma sát).
b) con lắc thẳng đứng(hình 15, b). Vị trí cân bằng trong trường hợp này được đặc trưng bởi điều kiện:

ở đâu  - độ lớn của lực đàn hồi tác dụng lên tải trọng
- độ lớn của lực đàn hồi tác dụng lên tải trọng  khi lò xo bị kéo giãn tĩnh
khi lò xo bị kéo giãn tĩnh  dưới ảnh hưởng của trọng lực
dưới ảnh hưởng của trọng lực  .
.
|
một |
|


Hình 15. Con lắc lò xo: một- ngang và b- theo chiều dọc
Nếu lò xo được kéo căng và thả tải thì nó sẽ bắt đầu dao động điều hòa theo phương thẳng đứng. Nếu sự bù đắp tại một thời điểm nào đó là  ,
thì lực đàn hồi bây giờ sẽ được viết là
,
thì lực đàn hồi bây giờ sẽ được viết là  .
.
Trong cả hai trường hợp đã xét, con lắc lò xo thực hiện dao động điều hòa với chu kì
 (27)
(27)
và tần số theo chu kỳ
 .
(28)
.
(28)
Về ví dụ của việc xem xét con lắc lò xo ta có thể kết luận rằng dao động điều hòa là chuyển động gây ra bởi một lực tăng tỉ lệ với độ dời  . Bằng cách này, nếu lực lượng phục hồi giống như định luật Hooke
. Bằng cách này, nếu lực lượng phục hồi giống như định luật Hooke
 (cô ấy có tênlực bán đàn hồi
) thì hệ phải thực hiện dao động điều hòa. Tại thời điểm đi qua vị trí cân bằng, lực phục hồi không tác dụng lên cơ thể, tuy nhiên, cơ năng sẽ bỏ qua vị trí cân bằng theo quán tính và lực phục hồi đổi chiều ngược lại.
(cô ấy có tênlực bán đàn hồi
) thì hệ phải thực hiện dao động điều hòa. Tại thời điểm đi qua vị trí cân bằng, lực phục hồi không tác dụng lên cơ thể, tuy nhiên, cơ năng sẽ bỏ qua vị trí cân bằng theo quán tính và lực phục hồi đổi chiều ngược lại.
Con lắc toán học
Hình 16. Con lắc toán học
 , thực hiện các dao động nhỏ dưới tác dụng của trọng lực (Hình 16).
, thực hiện các dao động nhỏ dưới tác dụng của trọng lực (Hình 16).
Dao động của một con lắc như vậy ở góc lệch nhỏ  (không vượt quá 5º) có thể được coi là sóng hài và tần số chu kỳ con lắc toán học:
(không vượt quá 5º) có thể được coi là sóng hài và tần số chu kỳ con lắc toán học:
 ,
(29)
,
(29)
và khoảng thời gian:
 .
(30)
.
(30)
2.3. Năng lượng cơ thể khi dao động điều hòa
Năng lượng truyền cho hệ dao động trong quá trình đẩy ban đầu sẽ biến đổi tuần hoàn: thế năng của lò xo bị biến dạng sẽ chuyển thành động năng của tải trọng chuyển động và ngược lại.
Cho con lắc lò xo thực hiện dao động điều hòa với pha ban đầu là  , I E.
, I E.  (hình 17).
(hình 17).

Hình 17. luật bảo toàn năng lượng cơ học
khi con lắc lò xo dao động
Ở độ lệch cực đại của tải trọng khỏi vị trí cân bằng thì cơ năng toàn phần của con lắc (cơ năng của lò xo biến dạng có độ cứng  ) bằng
) bằng  . Khi đi qua vị trí cân bằng (
. Khi đi qua vị trí cân bằng (  )
năng lượng tiềm năng lò xo sẽ bằng không, và tổng cơ năng của hệ dao động sẽ được xác định là
)
năng lượng tiềm năng lò xo sẽ bằng không, và tổng cơ năng của hệ dao động sẽ được xác định là  .
.
Hình 18 cho thấy sự phụ thuộc của động năng, thế năng và tổng năng lượng trong trường hợp dao động điều hòa được mô tả bằng các hàm lượng giác của sin (nét đứt) hoặc cosin (nét liền).

Hình 18. Đồ thị của sự phụ thuộc vào thời gian của động năng
và thế năng cho dao động điều hòa
Từ đồ thị (Hình 18) ta thấy tần số biến thiên của động năng và thế năng gấp đôi tần số riêng của dao động điều hòa.
Chuyển động dao động là bất kỳ chuyển động lặp lại theo chu kỳ nào. Do đó, sự phụ thuộc của tọa độ và vận tốc của vật vào thời gian trong quá trình dao động được mô tả bằng các hàm tuần hoàn của thời gian. TẠI khóa học ở trường các nhà vật lý coi các dao động như vậy trong đó các phụ thuộc và vận tốc của vật là các hàm lượng giác ![]() ,
, ![]() hoặc sự kết hợp của chúng, ở đâu là một số. Những dao động như vậy được gọi là dao động điều hòa (hàm
hoặc sự kết hợp của chúng, ở đâu là một số. Những dao động như vậy được gọi là dao động điều hòa (hàm ![]() và
và ![]() thường được gọi là hàm điều hòa). Để giải quyết các vấn đề về dao động có trong chương trình của một thể thống nhất kỳ thi quốc trong vật lý, bạn cần biết các định nghĩa của các đặc điểm chính chuyển động dao động: biên độ, chu kỳ, tần số, tần số tròn (hoặc tuần hoàn) và pha của dao động. Chúng ta hãy đưa ra các định nghĩa này và kết nối các đại lượng đã liệt kê với các tham số của sự phụ thuộc của tọa độ vật vào thời gian, trong trường hợp dao động điều hòa luôn có thể được biểu diễn dưới dạng
thường được gọi là hàm điều hòa). Để giải quyết các vấn đề về dao động có trong chương trình của một thể thống nhất kỳ thi quốc trong vật lý, bạn cần biết các định nghĩa của các đặc điểm chính chuyển động dao động: biên độ, chu kỳ, tần số, tần số tròn (hoặc tuần hoàn) và pha của dao động. Chúng ta hãy đưa ra các định nghĩa này và kết nối các đại lượng đã liệt kê với các tham số của sự phụ thuộc của tọa độ vật vào thời gian, trong trường hợp dao động điều hòa luôn có thể được biểu diễn dưới dạng
ở đâu, và là một số con số.
Biên độ dao động là độ lệch cực đại của vật dao động so với vị trí cân bằng. Vì giá trị cực đại và cực tiểu của cosin ở (11.1) bằng ± 1 nên biên độ dao động của vật dao động (11.1) bằng. Chu kỳ dao động là khoảng thời gian nhỏ nhất mà sau đó chuyển động của vật được lặp lại. Đối với sự phụ thuộc (11.1), khoảng thời gian có thể được thiết lập từ các cân nhắc sau. cosin - chức năng tuần hoàn với một khoảng thời gian. Do đó, chuyển động được lặp lại hoàn toàn thông qua một giá trị như vậy đó. Từ đây chúng tôi nhận được
Tần số dao động tròn (hoặc tuần hoàn) là số dao động trong một đơn vị thời gian. Từ công thức (11.3), chúng tôi kết luận rằng tần số tròn là giá trị từ công thức (11.1).
Pha dao động là đối số của hàm lượng giác mô tả sự phụ thuộc của tọa độ vào thời gian. Từ công thức (11.1), chúng ta thấy rằng pha của dao động của vật, chuyển động của nó được mô tả bởi sự phụ thuộc (11.1), bằng  . Giá trị của pha dao động tại thời điểm = 0 được gọi là pha ban đầu. Đối với sự phụ thuộc (11.1) thì pha ban đầu của dao động bằng giá trị nào. Rõ ràng, pha ban đầu của dao động phụ thuộc vào việc chọn điểm tham chiếu thời gian (thời điểm = 0), luôn luôn có điều kiện. Bằng cách thay đổi gốc tham chiếu thời gian, pha ban đầu của dao động luôn có thể được "biến" bằng 0, và sin trong công thức (11.1) được "biến" thành cosin hoặc ngược lại.
. Giá trị của pha dao động tại thời điểm = 0 được gọi là pha ban đầu. Đối với sự phụ thuộc (11.1) thì pha ban đầu của dao động bằng giá trị nào. Rõ ràng, pha ban đầu của dao động phụ thuộc vào việc chọn điểm tham chiếu thời gian (thời điểm = 0), luôn luôn có điều kiện. Bằng cách thay đổi gốc tham chiếu thời gian, pha ban đầu của dao động luôn có thể được "biến" bằng 0, và sin trong công thức (11.1) được "biến" thành cosin hoặc ngược lại.
 Chương trình ôn thi trạng thái thống nhất còn có kiến thức về các công thức tính tần số dao động của con lắc lò xo và toán học. Người ta thường gọi con lắc lò xo là vật dao động điều hòa trên mặt phẳng nằm ngang dưới tác dụng của lò xo, đầu thứ hai cố định (hình bên). Con lắc toán học là một vật thể khổng lồ, có thể bỏ qua các kích thước của chúng, dao động trên một sợi dây dài, không trọng lượng và không thể uốn nắn (hình bên phải). Tên của hệ thống này - "con lắc toán học" là do nó là một hệ thống trừu tượng toán học mô hình thực tế ( vật lý) của con lắc. Cần phải nhớ các công thức về chu kỳ (hoặc tần số) dao động của con lắc lò xo và toán học. Đối với con lắc lò xo
Chương trình ôn thi trạng thái thống nhất còn có kiến thức về các công thức tính tần số dao động của con lắc lò xo và toán học. Người ta thường gọi con lắc lò xo là vật dao động điều hòa trên mặt phẳng nằm ngang dưới tác dụng của lò xo, đầu thứ hai cố định (hình bên). Con lắc toán học là một vật thể khổng lồ, có thể bỏ qua các kích thước của chúng, dao động trên một sợi dây dài, không trọng lượng và không thể uốn nắn (hình bên phải). Tên của hệ thống này - "con lắc toán học" là do nó là một hệ thống trừu tượng toán học mô hình thực tế ( vật lý) của con lắc. Cần phải nhớ các công thức về chu kỳ (hoặc tần số) dao động của con lắc lò xo và toán học. Đối với con lắc lò xo
đâu là chiều dài của sợi, là gia tốc rơi tự do. Hãy xem xét việc áp dụng các định nghĩa và định luật này vào ví dụ về giải quyết vấn đề.
Để tìm tần số tuần hoàn của tải trong nhiệm vụ 11.1.1Đầu tiên chúng ta hãy tìm chu kỳ dao động, và sau đó sử dụng công thức (11.2). Vì 10 m 28 s là 628 s và trong thời gian này tải thực hiện được 100 dao động thì chu kì dao động của tải là 6,28 s. Do đó, tần số dao động tuần hoàn là 1 s -1 (đáp án 2 ). TẠI nhiệm vụ 11.1.2 tải thực hiện được 60 dao động trong 600 s nên tần số dao động là 0,1 s -1 (đáp án 1 ).
Để hiểu những gì con đường sẽ trôi qua hàng hóa trong 2,5 kỳ ( nhiệm vụ 11.1.3), theo dõi chuyển động của nó. Sau một khoảng thời gian, tải sẽ trở lại điểm có độ lệch cực đại, tạo thành dao động hoàn toàn. Do đó, trong thời gian này, tải sẽ vượt qua khoảng cách, bằng bốn biên độ: về vị trí cân bằng - biên độ một, từ vị trí cân bằng đến điểm lệch cực đại theo hướng khác - biên độ thứ hai, trở lại vị trí cân bằng - biên độ thứ ba, từ vị trí cân bằng về điểm xuất phát - thứ tư. Trong khoảng thời gian thứ hai, tải một lần nữa sẽ vượt qua bốn biên độ, và trong nửa chu kỳ còn lại - hai biên độ. Do đó, quãng đường đi được bằng mười biên độ (đáp án 4 ).
Lượng chuyển động của cơ thể là khoảng cách từ điểm bắt đầu đến điểm kết thúc. Trong 2,5 kỳ trong nhiệm vụ 11.1.4 cơ thể sẽ có thời gian để hoàn thành hai dao động toàn phần và nửa toàn phần, tức là sẽ ở độ lệch lớn nhất, nhưng ở phía bên kia của vị trí cân bằng. Do đó, lượng dịch chuyển có độ lớn bằng hai biên độ (đáp án 3 ).
Theo định nghĩa, pha của dao động là một đối số của một hàm lượng giác, nó mô tả sự phụ thuộc của tọa độ của một vật dao động vào thời gian. Do đó câu trả lời chính xác là nhiệm vụ 11.1.5 - 3 .
Chu kì là thời gian dao động hoàn toàn. Điều này có nghĩa là việc đưa cơ thể trở lại cùng điểm mà từ đó cơ thể bắt đầu di chuyển không có nghĩa là thời kỳ đó đã trôi qua: cơ thể phải quay trở lại cùng một điểm với cùng một tốc độ. Ví dụ, một vật bắt đầu dao động từ vị trí cân bằng, trong khoảng thời gian này sẽ có thời gian lệch giá trị cực đại theo một hướng, đi ngược lại, lệch cực đại theo hướng khác và quay trở lại. Do đó, trong khoảng thời gian, vật sẽ có thời gian lệch hai lần giá trị cực đại ra khỏi vị trí cân bằng và quay trở lại. Do đó, đoạn từ vị trí cân bằng đến điểm có độ lệch cực đại ( nhiệm vụ 11.1.6) cơ thể dành phần thứ tư của thời kỳ (câu trả lời 3 ).
Những dao động như vậy được gọi là dao động điều hòa, trong đó sự phụ thuộc của tọa độ của vật dao động vào thời gian được mô tả bằng một hàm lượng giác (sin hoặc cosin) của thời gian. TẠI nhiệm vụ 11.1.7đây là các hàm và, mặc dù thực tế là các tham số bao gồm trong chúng được ký hiệu là 2 và 2. Hàm là hàm lượng giác của bình phương thời gian. Do đó, các đại lượng chỉ dao động điều hòa (đáp án 4 ).
Với dao động điều hòa, tốc độ của vật thay đổi theo quy luật  , biên độ của dao động tốc độ là ở đâu (tham chiếu thời gian được chọn sao cho pha ban đầu của dao động sẽ bằng không). Từ đây, chúng tôi tìm thấy sự phụ thuộc động năng cơ thể từ thời gian
, biên độ của dao động tốc độ là ở đâu (tham chiếu thời gian được chọn sao cho pha ban đầu của dao động sẽ bằng không). Từ đây, chúng tôi tìm thấy sự phụ thuộc động năng cơ thể từ thời gian  (nhiệm vụ 11.1.8). Sử dụng cái nổi tiếng công thức lượng giác, chúng tôi nhận được
(nhiệm vụ 11.1.8). Sử dụng cái nổi tiếng công thức lượng giác, chúng tôi nhận được
Từ công thức này, động năng của vật thay đổi trong quá trình dao động điều hòa cũng theo định luật điều hòa, nhưng với tần số gấp đôi (câu trả lời là 2 ).
Tỉ số giữa động năng của tải trọng và thế năng của lò xo ( nhiệm vụ 11.1.9) có thể dễ dàng truy tìm từ các xem xét sau. Khi vật bị lệch một lượng lớn nhất so với vị trí cân bằng thì vận tốc của vật bằng không, do đó thế năng của lò xo lớn hơn động năng của tải trọng. Ngược lại, khi vật qua vị trí cân bằng thì thế năng của lò xo bằng không và do đó động năng lớn hơn thế năng. Do đó, giữa lúc vật đi qua vị trí cân bằng và độ lệch cực đại, động năng và thế năng được so sánh một lần. Và vì trong khoảng thời gian vật đi từ vị trí cân bằng đến vị trí cân bằng lệch cực đại hoặc ngược lại thì trong khoảng thời gian đó động năng của tải và thế năng của lò xo so với nhau bốn lần (đáp án là 2 ).
Biên độ dao động tốc độ ( nhiệm vụ 11.1.10) dễ tìm nhất theo định luật bảo toàn cơ năng. Tại thời điểm lệch cực đại, thế năng của hệ dao động bằng thế năng của lò xo.  , trong đó là hệ số cứng của lò xo, là biên độ dao động. Khi đi qua vị trí cân bằng, cơ năng bằng động năng.
, trong đó là hệ số cứng của lò xo, là biên độ dao động. Khi đi qua vị trí cân bằng, cơ năng bằng động năng.  , khối lượng của vật là ở đâu, là tốc độ của vật khi đi qua vị trí cân bằng, là tốc độ tối đa vật trong quá trình dao động và do đó, biểu diễn biên độ của dao động vận tốc. Cân bằng những năng lượng này, chúng tôi thấy
, khối lượng của vật là ở đâu, là tốc độ của vật khi đi qua vị trí cân bằng, là tốc độ tối đa vật trong quá trình dao động và do đó, biểu diễn biên độ của dao động vận tốc. Cân bằng những năng lượng này, chúng tôi thấy
(câu trả lời 4 ).
Từ công thức (11.5) ta kết luận ( nhiệm vụ 11.2.2) mà chu kỳ của nó không phụ thuộc vào khối lượng của con lắc toán học, và khi tăng chiều dài lên 4 lần thì chu kỳ dao động tăng lên 2 lần (câu trả lời là 1 ).
Đồng hồ là quá trình dao động, được sử dụng để đo khoảng thời gian ( nhiệm vụ 11.2.3). Từ đồng hồ "gấp rút" có nghĩa là khoảng thời gian của quá trình này ít hơn những gì nó nên được. Vì vậy, để làm rõ quá trình của các đồng hồ này, cần phải tăng khoảng thời gian của quá trình. Theo công thức (11.5), để tăng chu kỳ dao động của con lắc toán học thì cần tăng chiều dài của nó (đáp án là 3 ).
Để tìm biên độ dao động trong nhiệm vụ 11.2.4, cần biểu diễn sự phụ thuộc của tọa độ cơ thể vào thời gian dưới dạng một hàm số lượng giác. Đối với chức năng đã cho trong điều kiện, điều này có thể được thực hiện bằng cách giới thiệu một góc bổ sung. Nhân và chia hàm này cho  và sử dụng công thức cộng hàm lượng giác, chúng tôi nhận được
và sử dụng công thức cộng hàm lượng giác, chúng tôi nhận được
|

đâu là một góc như vậy  . Từ công thức này suy ra rằng biên độ của dao động cơ là
. Từ công thức này suy ra rằng biên độ của dao động cơ là  (câu trả lời 4
).
(câu trả lời 4
).
Chào buổi chiều!
Mọi thứ đều khá đơn giản. Bây giờ tôi có thể nói một vài từ ghép, nhưng sau đó tôi sẽ cố gắng giải thích ý nghĩa của chúng. Để đơn giản hóa việc trình bày, chúng ta sẽ nói về trường hợp một chiều; mọi thứ có thể dễ dàng khái quát thành trường hợp nhiều bậc tự do.
Vì thế, nhiệm vụ chinh cơ học --- để tìm sự phụ thuộc của tọa độ của vật thể vào thời gian, nghĩa là, trên thực tế, để tìm một số hàm liên kết một giá trị nào đó của tọa độ với mỗi thời điểm. Chúng tôi mô tả bất kỳ chuyển động nào bằng cách sử dụng định luật thứ hai của Newton. Định luật này bao gồm gia tốc, là đạo hàm thứ hai của tọa độ của vật thể đối với thời gian, và lực, thường phụ thuộc vào chính tọa độ đó. Ngoài ra, lực có thể phụ thuộc vào tốc độ của cơ thể, nghĩa là, vào đạo hàm bậc nhất của tọa độ theo thời gian. Do đó, với điểm toán học về quan điểm, định luật thứ hai của Newton biểu thị một mối quan hệ nhất định giữa tọa độ, đạo hàm thứ nhất và thứ hai của nó. Mối quan hệ này được gọi là trong toán học phương trình vi phân. Đạo hàm cao nhất có trong một phương trình như vậy là đạo hàm thứ hai. Toán học nói rằng nghiệm của một phương trình như vậy, đó là hình thức chung hàm thỏa mãn quan hệ của chúng ta phụ thuộc vào hai hằng số tùy ý mà không thể xác định được từ phương trình. Các hằng số tùy ý này được xác định trên cơ sở từng trường hợp cụ thể, ví dụ, bằng cái gọi là điều kiện ban đầu. Nghĩa là, để hiểu chính xác cơ thể sẽ chuyển động như thế nào, bạn không chỉ cần biết lực tác dụng lên nó mà còn cả tọa độ và tốc độ ban đầu của nó. Hai hằng số tùy ý trong lời giải được chọn sao cho hàm thu được của chúng ta và đạo hàm của nó (nghĩa là tốc độ) trong thời điểm ban đầu thời gian đã cho các giá trị.
Nó hoàn toàn tình hình chung. Hãy nhớ khi chúng ta nói về chuyển động của cơ thể với gia tốc không đổi, để thiết lập chính xác chuyển động, chúng ta cần chính xác hai số, tọa độ ban đầu và tốc độ bắt đầu.
Điều này cũng đúng đối với dao động. Dao động của một con lắc cụ thể (tức là con lắc có tần số riêng cho trước) cũng được xác định bởi hai số. Thông thường, nghiệm của phương trình con lắc thu được từ định luật II Newton được viết dưới dạng.
Ở đây chúng chỉ đóng vai trò của các hằng số tùy ý, phải được xác định từ các điều kiện ban đầu. Hãy tính tốc độ:. Hãy cho chúng tôi biết điều đó trong không khoảnh khắc thời gian, tọa độ và vận tốc của con lắc bằng nhau và. Sau khi giải hệ phương trình thông thường, người ta có thể tìm thấy các biểu thức cụ thể cho và thông qua và.
Tôi sẽ không đưa ra câu trả lời cho trường hợp chung nếu bạn muốn, bạn có thể dễ dàng làm điều đó cho mình. Tôi sẽ chỉ nói về những trường hợp cụ thể. Ví dụ, người ta biết rằng tại thời điểm không của thời gian, vật ở trạng thái cân bằng (nghĩa là), và tốc độ của nó bằng giá trị cực đại của nó (nghĩa là). Sau đó, chúng ta thu được trong trường hợp cụ thể của chúng ta rằng hệ phương trình có dạng:. Từ phương trình đầu tiên, rõ ràng ngay lập tức rằng (tất nhiên, phương trình đầu tiên cũng thỏa mãn điều kiện, nhưng sau đó nghiệm của chúng ta sẽ trở thành không, nhưng điều này không phù hợp với chúng ta). Sau đó thứ hai có dạng:, khi đó. Vì vậy, chúng tôi đã tìm thấy biểu thức cho cả hai hằng số. Kết quả là, chúng tôi có: Đồng thời, để tăng tốc nó quay ra. Nếu bây giờ chúng ta biểu thị bằng một biểu thức quen thuộc hơn cho biên độ, chúng ta sẽ có các công thức quen thuộc hơn.
Hãy xem xét thêm một ví dụ. Bây giờ hãy để hàng hóa vào vị trí cực đoan, nghĩa là, tốc độ của nó bằng không. Chúng tôi sẽ cho rằng nó lệch khỏi mặt tiêu cực trục, nghĩa là, tọa độ của nó là. Sau đó, các phương trình cho điều kiện ban đầu mang hình thức: từ phương trình thứ hai. Từ đầu tiên: . Như vậy, đối với tọa độ có: (đẳng thức thứ hai sử dụng công thức rút gọn). Đối với tốc độ:. Để tăng tốc độ: .
Các công thức cụ thể phụ thuộc vào dữ liệu ban đầu. Có tính đến tính tuần hoàn của sin và cosin, sử dụng các công thức khác nhau phôi, bạn có thể xóa dấu hiệu khỏi công thức, thêm giai đoạn, v.v.
Đối với công thức trong bài toán, không có, tần suất, vì giá trị cụ thể của nó được thay thế:
Rung động tự dođược thực hiện dưới ảnh hưởng Nội lực hệ thống sau khi hệ thống đã được đưa ra khỏi trạng thái cân bằng.
Đến Dao động tự do được thực hiện theo định luật điều hòa, cần lực có xu hướng đưa vật về vị trí cân bằng phải tỉ lệ với độ dời của vật khỏi vị trí cân bằng và có hướng ngược chiều với độ dời (xem § 2.1):
Sức mạnh của bất kỳ cái nào khác Bản chất vật lý thỏa mãn điều kiện này được gọi là bán đàn hồi .
Do đó, một tải trọng có khối lượng m gắn vào lò xo làm cứng k, đầu thứ hai của nó cố định bất động (Hình 2.2.1), tạo thành một hệ có khả năng thực hiện dao động điều hòa tự do trong điều kiện không có ma sát. Khối lượng trên lò xo được gọi là sóng hài tuyến tính dao động.
Tần số tròn ω 0 rung động tự do Trọng lượng của lò xo được tìm thấy từ định luật II Newton:
Với sự bố trí nằm ngang của hệ thống lò xo tải trọng, lực của trọng lực tác dụng lên tải trọng được bù bằng phản lực của giá đỡ. Nếu treo tải trọng vào lò xo thì trọng lực hướng dọc theo đường chuyển động của tải trọng. Ở vị trí cân bằng, lò xo bị dãn một lượng x 0 bằng
Do đó, định luật thứ hai của Newton đối với tải trọng lên lò xo có thể được viết dưới dạng
Phương trình (*) được gọi là phương trình của dao động tự do . Cần lưu ý rằng tính chất vật lý hệ thống dao động chỉ xác định tần số riêng của dao động ω 0 hoặc chu kỳ T . Các tham số của quá trình dao động như biên độ x m và pha ban đầu φ 0 được xác định theo cách mà hệ được đưa ra khỏi trạng thái cân bằng tại thời điểm ban đầu.
Ví dụ, nếu tải bị dịch chuyển khỏi vị trí cân bằng một khoảng Δ l và sau đó tại thời điểm t= 0 được thả mà không có tốc độ ban đầu, sau đó x m = ∆ l, φ 0 = 0.
Tuy nhiên, nếu tốc độ ban đầu ± υ 0 được truyền cho tải đang ở vị trí cân bằng, với sự trợ giúp của một lực đẩy mạnh, thì,
Vì vậy, biên độ x m dao động tự do và pha ban đầu của nó φ 0 được xác định điều kiện ban đầu .
Có nhiều loại hệ dao động cơ học sử dụng lực của các biến dạng đàn hồi. Trên hình. 2.2.2 cho thấy tương tự góc của một dao động điều hòa tuyến tính. Một đĩa nằm ngang treo vào một sợi dây đàn hồi cố định ở khối tâm của nó. Khi đĩa quay một góc θ thì xuất hiện một lực M biến dạng xoắn đàn hồi:
ở đâu Tôi = Tôi C - mômen quán tính của đĩa đối với trục đi qua khối tâm, ε - gia tốc góc.
Bằng cách tương tự với tải trọng trên lò xo, bạn có thể nhận được:
Rung động tự do. Con lắc toán học
Con lắc toán học gọi là vật có kích thước nhỏ, được treo trên một sợi chỉ mỏng không kéo được, khối lượng của vật này không đáng kể so với khối lượng của vật. Ở vị trí cân bằng, khi treo con lắc vào dây dọi thì trọng lực cân bằng bằng lực căng dây. Khi con lắc lệch khỏi vị trí cân bằng một góc φ nhất định thì xuất hiện thành phần tiếp tuyến của trọng lực F τ = - mg sin φ (Hình 2.3.1). Dấu trừ trong công thức này có nghĩa là thành phần tiếp tuyến có hướng ngược với hướng lệch của con lắc.
Nếu ký hiệu là x chuyển động thẳng của con lắc khỏi vị trí cân bằng dọc theo cung tròn bán kính. l, khi đó độ dời góc của nó sẽ bằng φ = x / l. Định luật thứ hai của Newton, được viết cho hình chiếu của các vectơ gia tốc và lực lên phương của tiếp tuyến, cho:
Mối quan hệ này cho thấy rằng con lắc toán học là một phức hợp phi tuyến tính hệ, vì lực có xu hướng đưa con lắc trở lại vị trí cân bằng tỉ lệ với độ không dịch chuyển x, một
Chỉ trong trường hợp dao động nhỏ khi đóng lại có thể được thay thế bằng một con lắc toán học là một dao động điều hòa, tức là một hệ có khả năng thực hiện dao động điều hòa. Trong thực tế, giá trị gần đúng này có giá trị đối với các góc có thứ tự là 15-20 °; trong khi giá trị chênh lệch không quá 2%. Con lắc dao động điều hòa với biên độ lớn không điều hòa.
Đối với dao động nhỏ của một con lắc toán học, định luật thứ hai của Newton được viết dưới dạng
Công thức này thể hiện tần số riêng của dao động nhỏ của con lắc toán học .
Do đó,
|

Bất kỳ vật thể nào gắn trên một trục quay nằm ngang đều có khả năng thực hiện dao động tự do trong trọng trường và do đó, cũng là một con lắc. Con lắc như vậy được gọi là vật lý (Hình 2.3.2). Nó khác với toán học chỉ ở sự phân bố khối lượng. Ở vị trí cân bằng bền, khối tâm C con lắc vật lý nằm dưới trục quay O trên phương thẳng đứng đi qua trục. Khi con lắc lệch một góc φ thì xuất hiện mômen trọng lực, có xu hướng đưa con lắc trở lại vị trí cân bằng là:
và định luật thứ hai của Newton cho một con lắc vật lý trở thành (xem §1.23)
Đây ω 0 - tần số riêng của dao động nhỏ của con lắc vật lý .
Do đó,
Do đó, phương trình biểu thị định luật II Newton cho một con lắc vật lý có thể được viết dưới dạng
Cuối cùng, đối với tần số tròn ω 0 của dao động tự do của con lắc vật lý, ta có biểu thức sau:
|

Sự biến đổi năng lượng trong các dao động cơ học tự do
Khi rảnh rung động cơ họcđộng năng và thế năng thay đổi tuần hoàn. Ở độ lệch lớn nhất của vật thể so với vị trí cân bằng, vận tốc và do đó động năng biến mất. Ở vị trí này, thế năng của vật dao động đạt gia trị lơn nhât. Đặt tải trọng vào lò xo thì thế năng là thế năng của độ biến dạng đàn hồi của lò xo. Đối với một con lắc toán học, đây là năng lượng trong trường hấp dẫn của Trái đất.
Khi vật đang chuyển động đi qua vị trí cân bằng thì tốc độ của nó là cực đại. Vật đi qua vị trí cân bằng theo quy luật quán tính. Lúc này, nó có động năng cực đại và thế năng cực tiểu. Sự gia tăng của động năng xảy ra với sự giảm đi của thế năng. Khi chuyển động xa hơn, thế năng bắt đầu tăng lên do động năng giảm, v.v.
Như vậy, trong quá trình dao động điều hòa xảy ra sự biến đổi tuần hoàn của động năng thành thế năng và ngược lại.
Nếu trong hệ dao động không có ma sát thì cơ năng toàn phần trong quá trình dao động tự do không đổi.
Đối với tải trọng lò xo(xem §2.2):
Trong điều kiện thực, hệ dao động nào cũng chịu tác dụng của lực ma sát (lực cản). Trong trường hợp này, một phần năng lượng cơ học được chuyển thành năng lượng bên trong Chuyển động nhiệt nguyên tử và phân tử, và dao động trở thành mờ dần (Hình 2.4.2).
Tốc độ tắt dần của dao động phụ thuộc vào độ lớn của lực ma sát. Khoảng thời gian τ mà biên độ dao động giảm dần trong e≈ 2,7 lần, được gọi thời gian phân rã .
Tần số của dao động tự do phụ thuộc vào tốc độ tắt dần của dao động. Khi lực ma sát tăng, tần số riêng giảm. Tuy nhiên, sự thay đổi tần số riêng chỉ trở nên đáng chú ý khi lực ma sát đủ lớn, khi dao động tự nhiên phân rã nhanh chóng.
Một đặc tính quan trọng của hệ dao động tự do dao động giảm xóc, Là yếu tố chất lượng Q. Tham số này được định nghĩa là một số N dao động tổng hợp do hệ thực hiện trong thời gian tắt dần τ, nhân với π:
Như vậy, hệ số chất lượng đặc trưng cho sự mất mát năng lượng tương đối của hệ dao động do có ma sát trong một khoảng thời gian bằng một chu kỳ dao động.
Dao động cưỡng bức. Cộng hưởng. Dao động tự
Dao động xảy ra dưới tác dụng của ngoại lực tuần hoàn được gọi là bị ép.
Ngoại lực thực hiện công việc tích cực và cung cấp một dòng năng lượng cho hệ thống dao động. Nó không cho phép dao động tắt dần, bất chấp tác dụng của lực ma sát.
Ngoại lực tuần hoàn có thể thay đổi theo thời gian theo các quy luật khác nhau. Đặc biệt quan tâm là trường hợp ngoại lực thay đổi theo quy luật điều hòa với tần số ω, tác dụng lên hệ dao động có khả năng thực hiện dao động tự nhiên với tần số ω 0 nhất định.
Nếu dao động tự do xảy ra với tần số ω 0 được xác định bởi các tham số của hệ thì dao động cưỡng bức ổn định luôn xảy ra ở tần số ω của ngoại lực.
Sau thời điểm bắt đầu chịu tác dụng của ngoại lực vào hệ dao động một thời gian Δ t thành lập rung động cưỡng bức. Thời gian lắng có độ lớn bằng thời gian phân rã τ của dao động tự do trong hệ dao động.
Tại thời điểm ban đầu, trong hệ dao động đều kích thích - dao động cưỡng bức với tần số ω và dao động tự do với tần số riêng ω 0. Nhưng dao động tự do bị tắt dần do không thể tránh khỏi sự hiện diện của lực ma sát. Do đó, sau một thời gian, trong hệ dao động chỉ còn lại dao động đứng yên với tần số ω của ngoại lực.
Ví dụ, hãy coi dao động cưỡng bức của một vật trên lò xo (Hình 2.5.1). Một ngoại lực tác dụng vào đầu tự do của lò xo. Nó buộc đầu tự do (bên trái trong Hình 2.5.1) của lò xo chuyển động theo quy luật
Nếu đầu bên trái của lò xo bị lệch đi một khoảng y và đúng một chỗ - ở khoảng cách xa x Từ vị trí ban đầu, khi lò xo không bị biến dạng, thì độ dãn dài của lò xo Δ l bằng:
Trong phương trình này, lực tác dụng lên vật thể được biểu diễn dưới dạng hai thuật ngữ. Số hạng thứ nhất ở vế phải là lực đàn hồi có xu hướng đưa vật về vị trí cân bằng ( x= 0). Thuật ngữ thứ hai là tác động tuần hoàn bên ngoài vào cơ thể. Thuật ngữ này được gọi là lực hấp dẫn.
Phương trình biểu thị định luật thứ hai của Newton đối với một vật thể trên lò xo khi có tác động tuần hoàn bên ngoài có thể được coi là nghiêm ngặt dạng toán học, nếu chúng ta tính đến mối quan hệ giữa gia tốc của vật và tọa độ của nó: sẽ được viết dưới dạng
Phương trình (**) không tính đến tác dụng của lực ma sát. không giống phương trình dao động tự do(*) (xem §2.2) phương trình dao động cưỡng bức(**) chứa hai tần số - tần số ω 0 của dao động tự do và tần số ω của lực phát động.
Dao động cưỡng bức ổn định của tải trọng trên lò xo xảy ra với tần số ảnh hưởng bên ngoài trong luật
|
Biên độ của dao động cưỡng bức x m và pha ban đầu θ phụ thuộc vào tỉ số của tần số ω 0 và ω và vào biên độ y m ngoại lực.
Ở tần số rất thấp, khi ω<< ω 0 , движение тела массой m, được gắn vào đầu bên phải của lò xo, lặp lại chuyển động của đầu bên trái của lò xo. Trong đó x(t) = y(t), và lò xo thực tế vẫn không được định dạng. Ngoại lực tác dụng vào đầu bên trái của lò xo không tác dụng, vì môđun của lực này là ω<< ω 0 стремится к нулю.
Nếu tần số ω của ngoại lực tiến tới tần số riêng ω 0 thì biên độ dao động cưỡng bức tăng mạnh. Hiện tượng này được gọi là cộng hưởng . Sự phụ thuộc vào biên độ x m dao động cưỡng bức với tần số ω của lực phát động gọi là đặc tính cộng hưởng hoặc đường cong cộng hưởng(Hình 2.5.2).
Khi cộng hưởng, biên độ x m dao động tải có thể lớn hơn nhiều lần so với biên độ y m dao động của đầu tự do (bên trái) của lò xo do tác dụng bên ngoài. Trong trường hợp không có ma sát, biên độ của dao động cưỡng bức khi cộng hưởng nên tăng vô hạn. Trong điều kiện thực, biên độ của dao động cưỡng bức trạng thái dừng được xác định theo điều kiện: công của ngoại lực trong thời gian dao động phải bằng công của cơ năng trong một thời gian do ma sát. Ma sát càng ít (tức là, hệ số chất lượng càng cao Q hệ dao động) thì biên độ dao động cưỡng bức khi xảy ra cộng hưởng càng lớn.
Đối với hệ thống dao động có hệ số chất lượng không cao (< 10) резонансная частота несколько смещается в сторону низких частот. Это хорошо заметно на рис. 2.5.2.
Hiện tượng cộng hưởng có thể gây ra sự phá hủy các cây cầu, tòa nhà và các công trình kiến trúc khác, nếu tần số dao động riêng của chúng trùng với tần số của lực tác động định kỳ đã phát sinh, chẳng hạn do chuyển động quay của một động cơ không cân bằng.
Rung động cưỡng bức là chưa đóng dấu biến động. Sự mất mát năng lượng không thể tránh khỏi do ma sát được bù đắp bằng việc cung cấp năng lượng từ nguồn bên ngoài của một lực tác dụng định kỳ. Có những hệ thống trong đó các dao động không lấy dấu phát sinh không phải do ảnh hưởng tuần hoàn từ bên ngoài, mà là kết quả của khả năng của các hệ thống đó để điều chỉnh dòng năng lượng từ một nguồn không đổi. Hệ thống như vậy được gọi là tự dao động và quá trình dao động không lấy dấu trong các hệ thống như vậy - dao động tự . Trong hệ thống tự dao động, có thể phân biệt ba phần tử đặc trưng - hệ dao động, nguồn năng lượng và thiết bị phản hồi giữa hệ dao động và nguồn. Là một hệ dao động, có thể sử dụng bất kỳ hệ thống cơ học nào có khả năng thực hiện các dao động tắt dần (ví dụ, con lắc của đồng hồ treo tường).
Nguồn năng lượng có thể là năng lượng biến dạng của lò xo hoặc thế năng của tải trọng trong trọng trường. Thiết bị phản hồi là một cơ chế mà hệ thống tự dao động điều chỉnh dòng năng lượng từ nguồn. Trên hình. 2.5.3 cho thấy một sơ đồ về sự tương tác của các phần tử khác nhau của một hệ thống tự dao động.
Một ví dụ về hệ thống tự dao động cơ học là đồng hồ có mỏ neo di chuyển (Hình 2.5.4). Một bánh xe chạy có răng xiên được gắn chặt vào tang có răng, qua đó dây xích có khối lượng được ném ra. Gắn vào đầu trên của con lắc mỏ neo(mỏ neo) bằng hai bản vật liệu cứng, cong theo một cung tròn có tâm nằm trên trục của con lắc. Trong đồng hồ đeo tay, quả nặng được thay thế bằng lò xo, và con lắc được thay bằng bộ cân bằng - một tay quay được gắn chặt vào một lò xo xoắn ốc. Bộ cân bằng thực hiện dao động xoắn quanh trục của nó. Hệ thống dao động trong đồng hồ là một con lắc hoặc một bộ cân bằng.
Nguồn năng lượng là một quả nặng được nâng lên hoặc một lò xo quấn. Cơ cấu phản hồi là một mỏ neo cho phép bánh xe chạy quay một răng trong một nửa chu kỳ. Phản hồi được cung cấp bởi sự tương tác của mỏ neo với bánh xe đang chạy. Với mỗi dao động của con lắc, răng bánh xe du lịch đẩy ngã ba neo theo hướng chuyển động của con lắc, truyền cho nó một phần năng lượng nhất định, phần năng lượng này bù lại phần năng lượng bị mất đi do ma sát. Do đó, thế năng của quả nặng (hoặc lò xo xoắn) được truyền dần cho con lắc.
Hệ thống tự dao động cơ học phổ biến trong cuộc sống xung quanh chúng ta và trong công nghệ. Dao động tự do động cơ hơi nước, động cơ đốt trong, chuông điện, dây cung của nhạc cụ, cột khí trong ống của nhạc cụ hơi, dây thanh khi nói, hát, v.v.
 |
| Hình 2.5.4. Cơ chế đồng hồ với một con lắc. |
Khi dao động xảy ra ở trường, chúng được minh họa bằng hai trong số các ví dụ đơn giản nhất: một quả nặng trên lò xo và một con lắc toán học (nghĩa là, một quả nặng trên một sợi không dãn) trong trường trọng lực. Trong cả hai trường hợp, một sự đều đặn quan trọng được quan sát thấy trong các dao động: chu kỳ của chúng không phụ thuộc vào biên độ - ít nhất là miễn là biên độ này vẫn nhỏ - nhưng chỉ được xác định bởi các đặc tính cơ học của hệ.
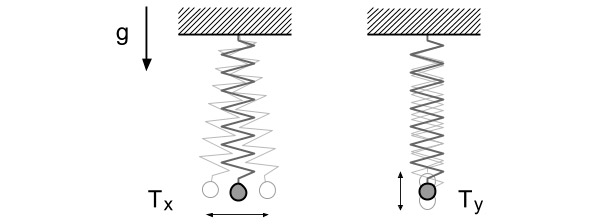
Bây giờ chúng ta hãy kết hợp hai ví dụ này và xem xét dao động của một quả nặng được treo trên một lò xo kéo trong trường hấp dẫn (Hình 1).
Để đơn giản, chúng ta bỏ qua chiều thứ ba và giả sử rằng con lắc lò xo này dao động điều hòa trong mặt phẳng của hình vẽ. Trong trường hợp này, trọng lượng (cũng được coi là trọng lượng điểm) có thể di chuyển trong một mặt phẳng thẳng đứng theo hướng tùy ý, và không chỉ lên xuống hoặc trái và phải, như trong Hình. 2. Nhưng nếu một lần nữa chúng ta tự giới hạn bản thân chỉ với những sai lệch nhỏ so với vị trí cân bằng, thì dao động ngang và dọc xảy ra gần như độc lập, với chu kỳ riêng của chúng. T x và T y.
Có vẻ như vì những dao động này được xác định bởi các lực và đặc tính hoàn toàn khác nhau của hệ, nên chu kỳ của chúng có thể hoàn toàn tùy ý, không có mối liên hệ nào với nhau. Hóa ra - không!
Một nhiệm vụ
Chứng tỏĐối với con lắc như vậy thì chu kỳ của dao động theo phương ngang luôn lớn hơn chu kỳ của dao động theo phương thẳng đứng: T x> T y.
Manh mối
Lúc đầu, vấn đề có thể khiến bạn ngạc nhiên bởi dường như chẳng có gì được đưa ra trong đó, nhưng cần phải chứng minh điều gì đó. Nhưng không có gì sai ở đây. Khi vấn đề được xây dựng theo cách này, có nghĩa là bạn có thể tự giới thiệu một số ký hiệu mà bạn cần, tính toán với họ những gì được yêu cầu, và sau đó đi đến kết luận đã không phụ thuộc từ các giá trị này. Làm điều đó cho nhiệm vụ này. Lấy các công thức về chu kỳ dao động, suy nghĩ về các đại lượng liên quan và so sánh hai chu kỳ với nhau bằng cách chia chúng cho nhau.
Dung dịch
Chu kỳ dao động của quả nặng m trên một lò xo cứng k và chiều dài L 0 là
 .
.
Công thức này không thay đổi ngay cả khi quả nặng được treo trong trọng trường với gia tốc rơi tự do g. Tất nhiên, vị trí cân bằng của quả nặng sẽ dịch chuyển xuống độ cao Δ L = mg / k- Với độ giãn của lò xo như vậy thì lực đàn hồi sẽ bù cho lực hấp dẫn. Nhưng chu kì của dao động điều hòa theo phương thẳng đứng về vị trí cân bằng mới này với lò xo bị dãn sẽ không đổi.
Chu kỳ dao động điều hòa theo phương ngang của con lắc bị dãn được biểu thị bằng gia tốc trọng trường g và của anh ấy hoàn thành chiều dài L = L 0 +Δ L:
 .
.
Nhờ sự kéo dài thêm trong trường hấp dẫn mà chúng ta phát hiện ra rằng

Đó là toàn bộ giải pháp.
Lời bạt

Mặc dù rõ ràng là đơn giản, con lắc lò xo là một hệ thống khá phong phú về các hiện tượng. Đây là một trong những ví dụ đơn giản nhất về một hiện tượng dễ thương - cộng hưởng Fermi. Nó bao gồm trong này. Nói một cách tổng quát, nếu bằng cách nào đó quả nặng được kéo và thả ra, thì nó sẽ dao động theo cả phương thẳng đứng và phương ngang. Hai dạng dao động này chỉ đơn giản là sẽ trùng nhau và không giao thoa với nhau. Nhưng nếu chu kỳ của dao động dọc và ngang có quan hệ với nhau bằng quan hệ T x = 2T y, sau đó các dao động ngang và dọc, như thể trái với ý muốn của chúng, sẽ dần dần chuyển thành nhau, như trong hình ảnh động bên phải. Năng lượng của các dao động sẽ được bơm từ dao động thẳng đứng sang dao động ngang và ngược lại.
Nó trông như thế này: bạn kéo quả nặng xuống và thả nó ra. Lúc đầu, nó chỉ dao động lên xuống, sau đó tự nó bắt đầu lắc lư sang hai bên, trong chốc lát thì dao động trở nên gần như hoàn toàn theo phương ngang, rồi lại quay trở lại phương thẳng đứng. Đáng ngạc nhiên là một dao động thẳng đứng hoàn toàn không ổn định.
Giải thích về hiệu ứng đáng chú ý này, cũng như tỷ lệ ma thuật T x:T y= 2: 1, thế là xong. Biểu thị bởi x và yđộ lệch của quả nặng khỏi vị trí cân bằng (trục y hướng lên trên). Với độ lệch như vậy, thế năng tăng lên bằng lượng
Đây là một công thức chính xác, nó phù hợp với mọi sai lệch lớn nhỏ. Nhưng nếu x và y nhỏ, ít hơn nhiều L, khi đó biểu thức gần bằng
cộng với các thuật ngữ khác có mức độ sai lệch thậm chí cao hơn. Số lượng U y và U x là thế năng thông thường mà từ đó có được dao động điều hòa theo phương thẳng đứng và phương ngang. Và đây là giá trị được đánh dấu bằng màu xanh lam Uxy là một chất phụ gia đặc biệt tạo ra sự tương tác giữa các dao động này. Do tương tác nhỏ này, dao động dọc ảnh hưởng đến dao động ngang và ngược lại. Điều này trở nên khá minh bạch nếu chúng ta thực hiện các phép tính sâu hơn và viết phương trình cho dao động ngang và dọc:

ký hiệu ở đâu
Nếu không có sự bổ sung màu xanh lam, chúng ta sẽ có các dao động độc lập thông thường theo chiều dọc và chiều ngang với tần số ωy và ω x. Phụ gia này đóng một vai trò động lực, bơm thêm rung động. Nếu tần số ωy và ω x là tùy ý, thì lực nhỏ này không dẫn đến bất kỳ tác dụng đáng kể nào. Nhưng nếu mối quan hệ ωy = 2ω x, cộng hưởng đặt ở: động lực cho cả hai dạng dao động đều chứa một thành phần cùng tần số với dao động riêng. Kết quả là, lực này dần dần nhưng đều đặn tạo ra một loại dao động và triệt tiêu một loại dao động khác. Đây là cách các dao động ngang và dọc truyền vào nhau.

Những vẻ đẹp bổ sung phát sinh nếu, trong ví dụ này, chiều thứ ba được tính đến một cách trung thực. Chúng ta giả sử rằng quả nặng có thể nén lò xo theo phương thẳng đứng và dao động như một con lắc theo hai phương ngang. Sau đó, khi điều kiện cộng hưởng được đáp ứng, khi nhìn từ trên xuống, trọng lượng sẽ viết ra một quỹ đạo hình sao, ví dụ như trong Hình. 3. Điều này xảy ra bởi vì mặt phẳng dao động không bất động, mà quay - nhưng không trơn tru, nhưng như thể đang nhảy. Miễn là dao động đi từ bên này sang bên kia, mặt phẳng này ít nhiều được giữ lại, và sự quay đầu xảy ra trong khoảng thời gian ngắn đó khi dao động dao động gần như thẳng đứng. Chúng tôi mời độc giả tự suy nghĩ lý do của hành vi này là gì và điều gì quyết định góc quay của máy bay. Và những ai muốn lao đầu vào nhiệm vụ khá sâu sắc này có thể xem qua bài viết Stepwise Precession of Resonant Swinging Spring, không chỉ cung cấp phân tích chi tiết về vấn đề mà còn nói về lịch sử của nó và mối liên hệ của vấn đề này với các phần vật lý, đặc biệt là vật lý nguyên tử.
 Phòng thí nghiệm như một nguyên mẫu của báo chí
Phòng thí nghiệm như một nguyên mẫu của báo chí Trích dẫn về Napoleon - dslinkov - LiveJournal
Trích dẫn về Napoleon - dslinkov - LiveJournal Tôi báo thù Người đàn ông trên chiếc xe ủi đất đã phá hủy thành phố
Tôi báo thù Người đàn ông trên chiếc xe ủi đất đã phá hủy thành phố